基于断面交通数据的特长隧道车辆轨迹预测方法研究
2021-11-04卢俊朋车磊
卢俊朋 车磊
摘 要:随着我国交通基础设施规模不断扩大,隧道群和特长隧道数量逐步增加。由于隧道运行环境相对封闭,发生事故后交通疏导和事故救援难度大,且多数隧道在车辆运行监测方面并不完备,因此研究隧道内车辆运行轨迹、掌握不同个体车辆间的跟驰特性尤为重要。本文首先从车辆跟驰模型研究现状进行梳理,分析车辆跟驰模型已有研究的缺陷及挑战;其次,结合断面交通数据优势,基于特长隧道特征分析、车辆运行轨迹特征分析,提出车辆轨迹预测模型的构建思路和流程。
关键词:跟驰模型;车辆轨迹预测;断面交通数据
中图分类号:U491 文献标识码:A
0 引言
隧道因运行环境相对封闭,发生事故后交通疏导和事故救援难度大,易造成重大人员伤亡和财产损失,因此科学合理的隧道交通监管技术就显得尤为重要。精准实时地预测隧道内各个体车辆的运行轨迹,能够为交通管理部门实时掌握隧道内车辆运行状态、对管控方案做出动态调整提供帮助。
车辆运行轨迹的预测离不开对车与车之间关系的研究。车辆处于自由行驶状态下时,车辆的运行相对平稳,车速只与驾驶员自身意愿相关;车辆处于非自由行驶状态下时,车队中任一辆车的车速都受前车速度的制约,即车辆处于跟驰状态。车辆跟驰模型通常描述的是无法超车的同一车道中相邻车辆间的相互作用,基于跟驰模型对特长隧道内不可变道条件下车辆的运行状态进行研究是较为适宜的。
1 车辆跟驰模型研究现状
国外的学者对车辆跟驰模型进行了系统的研究,主要可以分为以下几类:刺激—反应模型,安全距离模型,生理—心理模型。近年来,又涌现出模糊推理模型和元胞自动机模型。
1.1 刺激—反应模型
车辆跟驰理论的中心思想是:反应=灵敏度*刺激。Aron[1]通过分析一般条件下的跟驰数据,把后车驾驶员的反应分为减速、稳定跟驰和加速三个阶段。凌代俭[2]等考虑时滞效应对车流的影响,选取车头时距和相对速度为变量,构建了改进后的跟驰模型。刺激—反应模型具有开创意义,许多后期的跟驰模型都在此基础上建立。
1.2 安全距离模型
安全距离模型[3]最初由Kometani和Sasaki[4]提出,该模型最基本的关系并非GM模型所倡导的刺激—反应关系,而是寻找一个特定的跟驰距离。曲昭伟[5]等针对最优速度(OV)模型及其相关衍生模型假设安全距离恒定的缺陷,提出了基于最优速度模型的改进安全距离跟驰模型。
1.3 生理—心理模型
生理—心理模型用一系列阈值和期望距离体现人的感觉和反应,在不同的值域,后车与前车存在不同的影响关系。行为阈值模型的缺点在于模型的参数较多,子模型之间的相互关系比较复杂,并且对于各种阈值的调查观测比较困难。
1.4 模糊推理模型
基于模糊推理的车辆跟驰模型主要通过推理驾驶员未来的逻辑阶段来研究驾驶员的驾驶行为,核心仍是刺激—反应关系。近些年来在该领域的一些研究主要包括:Rekersbrink[6]模糊化了的MISSION模型;Henn[7]TRAFFIC—JAM模型。
1.5 元胞自動机模型
元胞自动机模型对交通系统的描述实践了一种用离散化模型描述离散化问题的思想,避免了流动比拟下确定性方程的严格假设及求解离散化对真实信息的损失。但该模型的假设与实际的驾驶行为还存在着较大的差距,如何将该模型与交通实际联系起来,还需要做大量的工作。
1.6 现有研究的缺陷
现有跟驰模型研究存在以下缺陷:
(1)模型的通用性较差,各类限制条件较多。(2)理论上的假设在模型的建立中是合乎情理的,但与实际情况存在着差异。(3)实际运行中跟驰行为受道路和流量等多种条件的影响,而大多模型中忽略了其影响,只考虑了个别因素的作用。
2 研究热点与面临的挑战
2.1 研究热点
精准实时地预测车辆在隧道内行驶的轨迹参数,对于提前预测和研判交通态势尤为重要,通过预测车辆未来时刻的轨迹信息,能够有效评估驾驶安全性和舒适性。精准预测车辆运行轨迹,有利于隧道监管者实时掌握个体车辆及交通流运行状态。
2.2 车辆轨迹预测面临的挑战
(1)个体车辆在各时刻运动的不均衡性。在不同交通流状态下,个体车辆的运动特征具有不均衡性。在自由流状态下,同一个体车辆的速度相对稳定,速度特征只与驾驶员意愿相关;在非自由流状态下,同一个体车辆的速度特征与自由流状态下的速度特征有明显不同。
(2)不同个体车辆之间在各时刻运动的不均衡性。在不同交通流状态下,不同个体车辆的运动特征具有不均衡性。在自由流状态下,不同个体车辆的速度特征具有多样性与差异性;在非自由流状态下,相邻两车中后随车的速度和其纵向位置受前导车的影响,后随车驾驶员通过加、减速力图保持同前车的安全间距,并以此对前导车的动作做出反应。
3 断面交通数据环境
3.1 断面交通数据特征
固定型的断面交通检测设备被用来采集道路断面的交通流量、速度、车头间距等数据。断面交通检测数据具有以下特征:(1)数据易提取。(2)数据量丰富。(3)数据精度高。
3.2 基于断面交通数据的车辆轨迹预测的优势
断面交通检测设备在公路隧道有较高的覆盖率,断面交通数据容易获取且信息完备,通过数据清洗和分类筛选,可以较为直观地分析不同交通环境下车辆运行特征,基于断面交通数据的轨迹预测模型实用性、适应性较强。
4 基于断面交通数据的特长隧道车辆轨迹预测模型构建
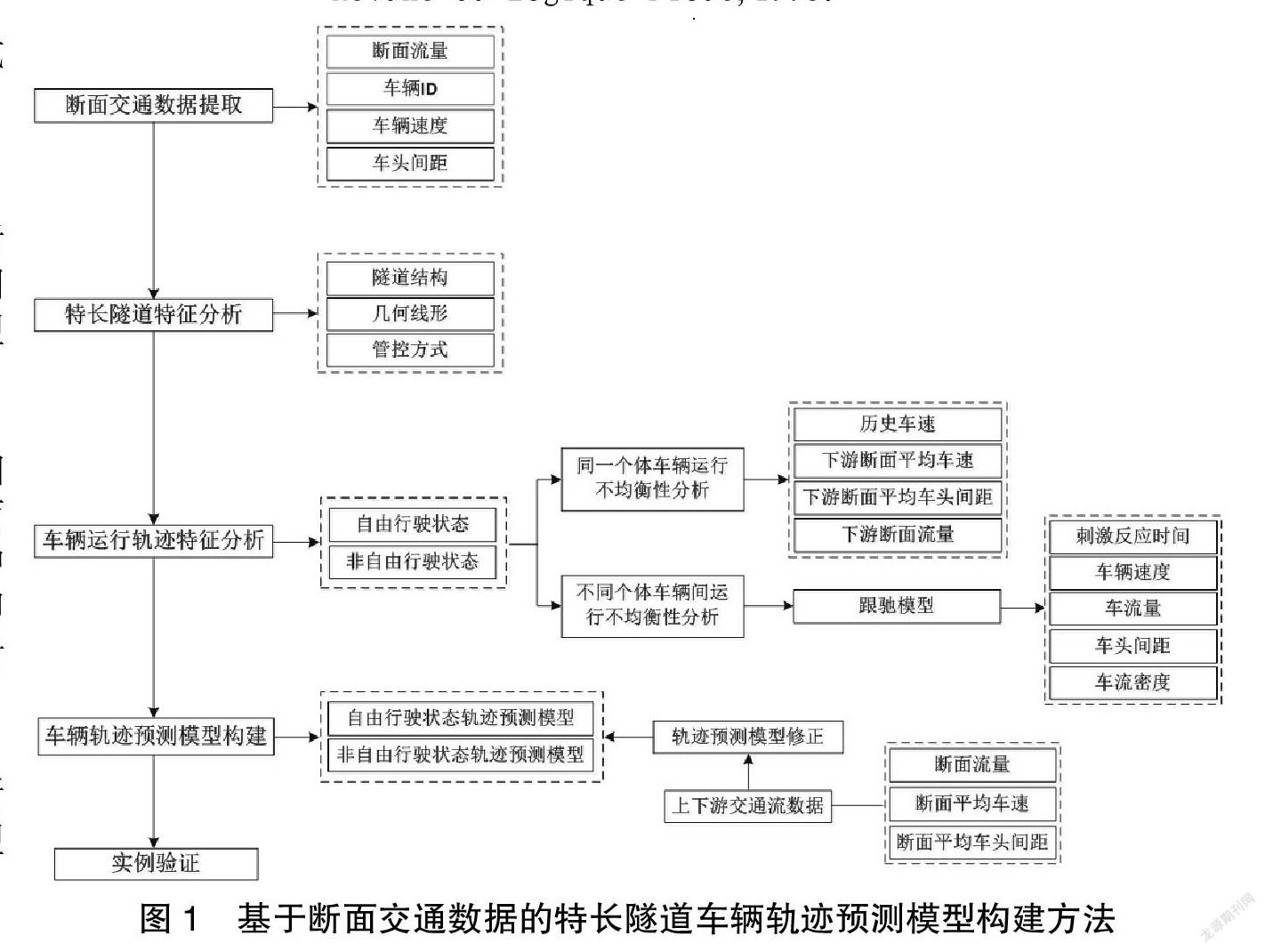
4.1 数据预处理与指标参数提取
利用隧道侧装视频等断面交通检测设备获取隧道内车辆速度、车流量、车头间距等数据,进行数据预处理后可获取车辆通过断面时的指标参数,为车辆运行轨迹特征分析与车辆轨迹预测模型建立提供数据支撑。
4.2 特长隧道特征分析
从道路结构、几何线形、管控方式等方面对特长隧道进行特征分析研究。
4.3 车辆运行轨迹特征分析
基于车辆跟驰模型、断面交通数据,研究不同交通流状态下隧道内车辆运行轨迹的共性规律,掌握不同个体车辆间的跟驰特性,为车辆运行轨迹预测模型构建提供理论与数据支持。
4.4 车辆运行轨迹预测模型构建
自由行驶状态下车辆的运行状态相对平穩,车速与驾驶员自身意愿相关;而在车辆处于非自由行驶状态下时,车队中任一辆车的车速都受前车速度的制约,即车辆处于跟驰状态。基于车辆跟驰理论对车辆运行轨迹预测模型进行构建。
4.5 车辆运行轨迹预测模型修正
结合上下游断面交通流数据,判断上下游交通运行态势,对车辆预测模型参数进行修正(如图1)。
5 结语
车辆轨迹预测的研究在交通流监测与管控方面的研究有所欠缺,且许多已有的车辆轨迹预测研究中忽略了车速的变化以及车辆间的跟驰特性影响,在精度与准度上存在一定不足。依托大量车道断面数据深度发掘车辆运行轨迹特征,构建基于断面交通数据的特长隧道车辆轨迹预测模型,精准预测车辆运行轨迹,有助于监管者实时掌握交通流状态,为交通管控方案的制定与动态调整提供依据。
参考文献:
[1]Aron M.Car Following in an Urban Network: Simulation and Experiment.In Proceedings of Seminar D,16th PTRC Meeting,1988.
[2]凌代俭,肖鹏.一类非线性车辆跟驰模型的稳定性与分岔特性[J].交通运输工程与信息学报,2009(4):6-11+24.
[3]陈征,闫冬梅,刘钊,等.典型跟驰模型的特征与性能分析[J].交通科技,2018(3):98-102.
[4]Komentani E,Sasaki T.Dynamic Behavior of Traffic with a Nonlinear Spacing-speed Relationship.In Proceedings of the Symposium on Theory of Traffic Flow,1959.
[5]曲昭伟,潘昭天,陈永恒,等.基于最优速度模型的改进安全距离跟驰模型[J].吉林大学学报(工学版),2019(4):1092-1099.
[6]Cameron D.Advanced Transportation Systems Symposium,In Proceedings of the 28th,SATA Conference,1995.
[7]Henn V.Utilization de la Logique Floue Pourla Modelisation Mieroseo Pique du Trafic Routier.La Revune du Logique Floue,1995.