填筑工程无人化测量关键技术
2021-11-04潘贤亮刘宏
潘贤亮,刘宏
(上海达华测绘科技有限公司,上海 200136)
0 引言
填筑工程施工区域通常近岸濒海,属于浅滩或滩涂区域,环境复杂。在潮间带区域,水草丛生,渔网遍布;抛石作业区域乱石较多,水下陡深陡浅,非常不利于地形的测绘。常规通过人工RTK 测量或者有人船舶进行水深测量来获取填筑区域的平面和高程信息。传统测船吃水深,易撞滩、搁浅,且人工操作船舶走线偏差大;人工跑滩,滩面质软、淤陷,人员和设备安全风险高,作业效率低。
如何快速、安全、准确地进行相应的测量工作,为施工提供准确及时的服务,是亟需解决的问题。无人机、无人艇测量技术相结合形成的无人化测量技术,具有自动化、智能化、高精度、高效率的特点,为填筑工程测量提供了新思路[1-2]。
1 无人机航摄结合激光雷达测量技术
1.1 无人机激光雷达系统测高技术
无人机机载雷达测量系统搭载激光雷达,点云密度高,可获取地表高精度三维信息,快速提取浅滩、滩涂等地物信息,作业效率高,尤其在芦苇、树林等植被覆盖的区域,激光脉冲独特的多次回波技术,可以迅速获取到地表真实数据。多旋翼无人机搭载激光雷达实施测量,可发挥无人机的机动快速和激光穿透植被的优势,提高了作业效率,解决植被覆盖滩涂测量难题[3]。
在进行测量作业时,需充分了解无人机和激光雷达系统的设备结构、使用方式及各项功能,使两者能够稳定、完整的结合起来;合理规划航线,保证相邻条带重合度满足规范要求,保证数据处理质量。在数据处理时,需要根据测量区域的具体情况针对性处理,对于植被覆盖区,无人机激光雷达系统发射的激光波可以穿透植被空隙到达地面,获取地面点数据;但是对于有水区域,激光雷达系统发射的激光波无法穿透水体,从点云数据成果判断十分困难,要结合现场照片进行判断;对于潮间带地区,潮水刚退出露滩及吹填区吹填的新鲜泥表时,由于表层覆盖了一层水膜,会导致激光雷达系统后向散射率变低,从而造成扫描航带宽度变窄,若要保证数据获取的精度与准确性,需要根据现场情况缩短航带间隔以保证数据质量。
通过对不同区域的成果与已有的人工RTK 测点比对,高程中误差最小的为近岸构筑物,高程中误差最大的为植被覆盖区,不同测量区域高程中误差均在12 cm 以内,优于GB/T 17278—2009《数字地形图产品基本要求》1∶500 地形图要求,体现了该系统的高精度和可靠性。
1.2 点云数据算法提升与改进技术
点云处理方法一般是基于离散点云数据进行每个点或点云区域的单独处理与输出。处理时间长,精度较低,且受地表噪点的影响较大。在实际使用过程中,总结出了人工干预结合自动滤波方法[4],此方法在进行自动滤波之前先对点云进行人工处理,比如剔除地面凹点跳点,点云平滑等操作,既有自动滤波的公式化、避免人工分类中的失误与界线分隔不明情况出现的优点,又能有效避免自动滤波时机械化取最低点而导致测出整个地面高程偏低的情况。使用此种方法可以很大程度上减少数据后处理的时间,以及对处理人员数据处理经验的需求。
在系统参数校准时,选择校准区域,首先人工寻找相同的特征点,进行安装偏差角度的计算,将Roll、Pitch 和Yaw 三者的校准值计算出来,将该值设置进自动校准窗口,再启用自动校准项,对人工校准值进行精细校准,并将校准值上载至点云数据,查看同一航线、相同区域的2 条相同航带的点云叠合情况,直至两者重合,此时最佳校准参数会自动上载至校准数据。
通过一系列的测试和作业,根据数据自身特点和成果要求,总结出一套从数据预处理到成果输出的较为成熟的工作流程。以该流程为框架,结合主流激光雷达数据软件处理的工作方式,采用C#编程语言开发基于激光点云数据自动生成数字地面模型的算法及专业的识别、过滤软件系统。该软件在点云数据导入后,通过设置相关的自动化识别、过滤参数,实现海量数据的自动化识别、过滤,生成数字地面模型最终成果,有效降低了繁重的数据处理工作强度,减少了人为处理原因产生的处理误差,提高了数据处理速度和质量。
1.3 激光点云和低空摄影测量成果融合
激光点云和低空摄影测量成果融合分为将激光点云数据用于低空摄影测量的相控和点云与航空摄影测量影像融合两方面[5-9]。
1)激光点云数据用于航空摄影测量的相控
激光雷达数据在对现场高程数据的获取上因为其为主动式测量,从激光扫描头中发射激光脉冲对现场地表进行测量,可以获取较为完整的地面点坐标数据。但是受制于扫描式测量的方式,对于地表的色彩纹理获取较少,且虽然点云数据的扫描密度很大,但是在大范围测量过程中,仍会不可避免出现较多扫描间隙。而摄影测量所获取的正射图像则对现场的纹理色彩以及地物特征把握较好,但是由于其测量原理原因,在如潮间带等难以布设大范围像控点的情况下,其高程信息精度会受到一定影响。因此将激光点云数据用于摄影测量的相控,解决了滩涂等困难地形区域人工无法布设相控点的难题,可以提高摄影测量高程精度。
2)点云与航空摄影测量影像融合
通过开发相应的地理信息软件,实现激光点云数据与光学影像以及施工图的匹配、融合,将点云数据生成DEM 底图,随后将DEM 作为正射影像的高程信息基础进行显示与建模,可以很大程度上提高三维地形测量精度与表达效果。
对于复杂地形区域,使用多旋翼无人机低空进行精确高程数据获取(DEM),再使用小型低空无人机进行航拍作业,获取真彩色纹理数据以及高程数据,随后进行叠加分析与处理。采用点云数据和航摄数据进行色彩匹配的计算方法,可以将RGB 属性赋予对应坐标点的点云数据,并可以使用RGB 显示模式对点云数据进行真彩色显示。进行激光点云与航摄正射影像融合,可以获取现场真彩色点云,赋予了RGB 属性的激光点云数据不仅保留原有的激光点云的反射强度、反射角度以及坐标信息等属性,又附加了真彩色属性。这样对于激光点云的特征纹理分析以及检查点选取的意义非常大,且可以将正射影像航摄照片进行匹配检校,以减少接缝处的变形情况。另外,在两者叠合的基础上进行设计图的叠加,可以直观地判断项目施工的进度和质量,对于指导施工具有重要意义,如图1 所示。
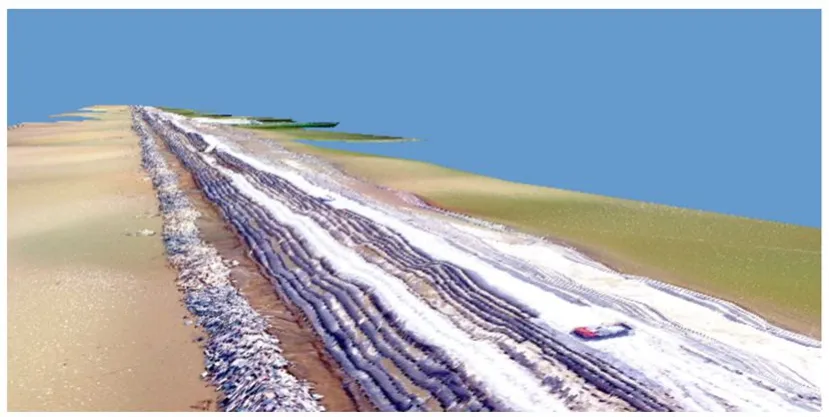
图1 点云数据叠加影像图Fig.1 Overlay image of point cloud data
无人机结合激光雷达测高技术和低空航摄结合,实现了在植被覆盖区、滩涂区、吹填区等人员测量困难区域的地表高程数据获取。
2 适应围区测量的无人船集成关键技术
无人船技术应用于环境治理、海事调查、安全防卫、军事等方面的案例较为丰富,但运用于吹填施工检测方面的案例较少,针对围填工程应用设计也不太成熟。通过调研选择一款较为合适的无人船母船,在此基础上通过集成定位和测深设备,测试、优化,逐步形成一款适用于围填工程的无人测量船[10-15]。
2.1 无人船集成改进
为适应围区测量需求,设计的无人船船体要吃水浅,适合浅滩作业;体积小,可方便穿梭在围区泥塘等困难水域;推进器转向灵活,动力强劲;船底对于测深换能器有保护措施。
将采集终端、定位、测深传感器在船端集成,通过有线方式传输,无线网桥用来控制采集和显示过程效果。并搭载摄像头、避碰雷达等传感器,兼容测深数据采集系统,记录船体定位信息,船体的姿态信息及水深数据,通过控制软件进行实时显示和操作,集成的无人船测量系统见图2。

图2 无人船测量系统Fig.2 Unmanned ship survey system
2.2 无人船测量试验
无人船技术应用于吹填区、水系内河监测,可填补传统船测量盲区的水深数据空白,直线航行的优势弥补了船测走线弯曲的缺陷,降低了水深数据的冗余量,提高了数据的利用率;也适合进行固定断面监测,多期测量断面一致性较好。而传统有人船测量不同期对同一断面测量航线偏差较大,不利于分析。上海横沙圈围项目多期无人船围堤断面监测数据显示,坝体上半部分较稳定,结构特征一致;综合多期数据对比,便于分析坝基底部外侧受潮水侵蚀导致的冲淤情况,为筑堤护底护基提供了及时、有效的数据参考。
为验证无人船测量的精度和性能,使用同一组测线对相同区域进行测线布设,测线间隔10 m,按1 m 距离采样。无人测量船与有人测量船测量同一时间段同步进行,潮位控制均采用RTK 验潮模式。使用hypack 软件统计2 种测量方式的交叉点比对信息,分析其综合测量精度,2 种测量方式深度互差统计结果见表1。

表1 深度互差统计表Table 1 Depth cross-difference statistics
统计表明,互差5 cm 以内占比80.5%,互差10 cm 以内占98.6%,互差均小于20 cm。通过2种水深采集方式的成果统计比较可知,无人船整体水深测量精度较高。
通过实际测试成果表明,自主集成的无人船体积小、重量轻、荷载大、吃水浅,适用于围填工程的浅滩区域的水深数据采集,采集结果较稳定;采集的数据通过2.4 GHz 无线网桥实时传回岸端,保证了数据的实时完整回传,可满足大部分生产的需求。
3 无人船、无人机成果数据融合处理
填筑区内包含大面积水域、浅滩、植被覆盖区以及新成陆区域,水陆交接区域受潮水影响,常规测量手段往往造成成果数据的真空地带;采用无人船高潮时水面作业和无人机低潮时空中作业相结合,实现水陆数据成果的无缝衔接。
水陆融合技术现阶段分为3 个步骤进行实现:第1 步为工程数据的统一化记录,即统一无人机、无人船等一系列数据格式。因为该类基础数据都是获取以表达点的位置等信息,本质上各类空间坐标文件都可以通过转换变化为行业内的标准数据格式,如X,Y,Z 等基础数据格式。在此基础之上,进行统一数据记录标准,统一字段格式,统一数据后缀等工作。第2 步是数据处理模块的集成化,可以将无人船数据、无人机数据以及其他类型数据进行导入,并可以进行同屏显示与处理。第3 步为多种数据统一化后的叠合显示、分析以及输出,而数据输出的结果,可以是统一化的数据格式成果,也可以是各系统中常用的数据格式。水陆数据融合效果见图3。

图3 水陆数据融合Fig.3 Land and water data fusion
4 结语
填筑工程无人化测量关键技术,创新性地将无人机测高技术和无人船测深技术进行融合,解决了大面积吹填区域水陆三维地形数据获取的难题;改进了激光雷达数据处理流程与工艺,利用校准参数智能化选取,人工干预法自动滤波,航拍影像叠合校准分析等全新测量手段,减轻了内外业工作人员的作业强度;将点云用于航摄相控,实现了激光点云数据与光学影像以及施工图的匹配、融合,提高了三维地形表达效果,拓展了应用空间;通过针对性的集成无人船、测深和定位系统实现对大船和人工无法到达的围区浅滩的准确测量,与无人机结合提高围区检测效率和降低人员安全风险。该技术大大提高了沿海滩涂开发的速度和效益,降低人力、物力的投入,具有较高的经济及社会效益。
