CFAR算法对多环境下的目标检测
2021-11-03南开大学滨海学院
南开大学滨海学院 张 喆
为解决毫米波雷达对某个环境下探测的反射回波信号,并利用多普勒频率进行雷达对目标径向运动时的检测和速度产生的估计问题,本文提出了基于线性调频连续波(Linear Frequency Modulated Continuous Wave,LFMCW)毫米波雷达,采用利用多周期双通道得到的相位变化信息结合多维频谱分析(1D-FFT和2D-FFT)以及恒虚警检测(constant false alarm rate,CFAR)实现了对径向运动目标的检测以及较为精准的速度估计,并分析了对多目标,多环境下的处理特征和检测,最后通过仿真实验和实际测试对算法检测效果和准确度进行验证。实验结果表明,该算法在多环境多目标下检测和速度的估计方面准确性较高。
在复杂环境下的目标检测中,毫米波雷达对回波信号实现恒虚警检测将具有一定的困难且难以取得良好的效果。对于随机杂波干扰信号,采用功率检测门限会产生大量的虚警和检测率的下降,在实际操作中无法应用。然而,CFAR检测算法可以对杂波情况下进行目标检测。它采用与待检参考单元相邻的参考单元进行检测,得到背景噪声功率估计值,再与门限因子相乘得到功率检测门限,从而避免大量虚警的产生。常见的CFAR检测算法有单元平均恒虚警检测(cell averaging constant false alarm rate,CA-CFAR)、最大恒虚警检测(greatest test of constant false alarm rate,GO-CFAR)和最小选择恒虚警检测(smallest test of constant false alarm rate,SO-CFAR)。
针对以上问题,本文对两种环境下测量的回波数据做了CFAR检测,通过仿真实验和实测数据处理,直观地表明CFAR常见算法在两种环境下对目标的检测优略。
1 毫米波雷达
毫米波雷达是工作频率在30-300GHz探测雷达,毫米波雷达具有体积小、质量轻和空间分辨率高的特点。与传统的雷达相比,毫米波雷达穿透能力强,具有全天候、高分辨率、可测速以及可测距等功能的检测传感器,毫米波雷达能分辨识别很小的目标,而且能同时识别多个目标,常用与军事和民用两大领域。与此同时,毫米波雷达常常用于交通、安防、生命体征检测等多方位领域。
2 CFAR算法
利用77G毫米波雷达测量的回波中含有丰富的目标信息,但是由于噪声的干扰且噪声具有不可预测性,需要过滤噪声干扰获取所需目标信息,处理得到频谱信息后,依然存在较多的干扰信息导致无法检测到目标。基于上述问题,CFAR算法在处理过程中具有很好的优势,其原理是根据检测在实际场景中干扰的波动,从而选择与之对应的检测门限值来完成对多环境条件下目标的检测。CFAR具有较强的稳定性,在保持较理想的虚警概率和漏检概率的情况下,还能保持接收机稳定状态,CA-CFAR是其最基本的算法。
假设杂波幅度为x,杂波标准差为δ,噪声概率密度函数f0(x)服从瑞利分布,则:

假设检测门限为x0,被判断为目标信号的条件是大于x0。则误判杂波为目标信号的概率为:

从算法实现不同CFAR可分为三种:单元平均恒虚警、最大选择恒虚警和最小选择恒虚警。
单元平均恒虚警检测的原理是首先对参考单元的功率求取平均值,然后估计干扰功率,进而算出检测门限值,原理图如1所示:
由图1可知一维CA-CFAR窗有M个参考单元、2个保护单元和待检单元xi。

图1 1-D CA-CFAR窗
如果噪声干扰为独立同分布时,噪声功率为β2/2,则待检测单元概率函数为:

当把这M个独立同分布的参考单元结合时,则xn的联合概率函数为:


又知检测门限的概率密度函数为:

计算这个积分得到最终结果为:

根据上式推导结果可得虚警概率PFA只由门限因子k与M个参考单元决定,跟具体环境中的噪声干扰无关。
门限因子为:

图2为二维CA-CFAR目标检测原理图。

图2 二维CA-CFAR检测原理图
3 仿真分析
数据模型为模拟均匀情况下,平面上距离雷达处分别存在静止的多目标,距离分别为100m、150m、520m、600m、800m和900m,设置高斯随机噪声,处理数据结果如图3、图4所示。

图3 均匀情况下多目标示意图

图4 均匀情况下CFAR处理后示意图
数据模型为模拟杂波情况下,杂波平面上距离雷达50m处存在静止目标,雷达参数设置为:最大检测距离为Rmax= 100m,最大检测速度为Vmax= 100m/s,速度分辨率为Vdr= 3m/s,经过处理结果如图5、图6和图7所示。
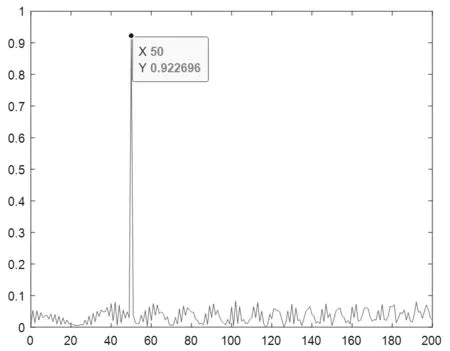
图5 一维FFT的距离和速度

图6 二维FFT的距离和速度

图7 CFAR处理结果示意图
4 实测数据验证
使用77G毫米波雷达在室外均匀环境下和杂波环境下所测得实验数据进行验证分析,均匀环境情况下处理结果如图8和图9所示。杂波环境下处理结果如图10所示。
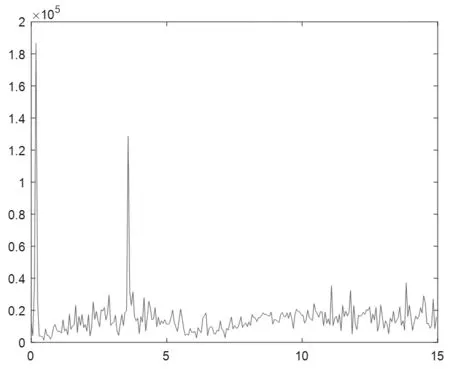
图8 一维FFT的距离和速度

图9 二维CFAR结果示意图
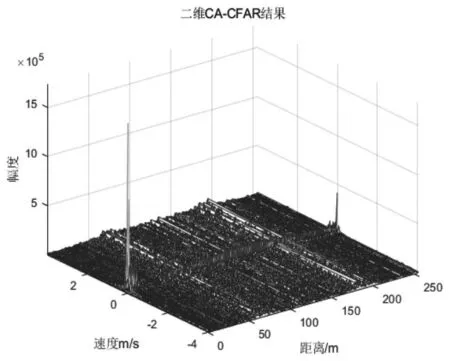
图10 二维CA-CFAR结果示意图
本文提出了基于多周期双通道得到的相位变化信息,结合多维频谱分析和恒虚警检测算法在多环境下使用毫米波雷达对径向运动目标进行检测以及较为准确的速度估计,同时通过仿真实验和实际测量数据验证了本文算法的有效性、可靠性以及准确性。该目标检测和速度估计的算法可为安防交通体系的毫米波雷达信号处理算法提供有价值的参考。
