静态GPS在长江堤防监测分析中的应用
2021-11-03邓彬彬徐奕正
徐 红, 邓彬彬, 徐奕正, 丁 阳
(张家港市长江防洪工程管理处, 江苏 苏州 215625)
每年6、7月份长江中下游地区都会出现持续天阴有雨的现象(梅雨季节),导致降水量激增,进而对长江堤防的安全运营带来极大的隐患,故而需要及时对其进行形变分析。
以往只能采用沿堤防人工巡视的方式,难以发现其中细微的形变变化,仍然存在一定的安全隐患[1-2]。GPS静态测量是利用测量型GPS接收机进行定位测量,短距离(15 km以内)的定位精度可以达到毫米级,而且还有无需通视、全天候、效率高等优势,能够在雨季结束后及时实现对长江堤防的快速诊断,故而提出一种基于静态GPS测量技术的堤防微观监测方法。经在张家港市境内42.33 km的长江堤防上的应用表明,能够有效地辅助管理与决策,保障安全运营。
1 静态GPS测量
1.1 选点
选取堤防监测断面中堤顶、堤角各1点,共82点进行一级GPS观测。编号采用堤防监测断面中的编号,如“WJD1-1”等。堤防监测断面点位布置示意图如图1所示。
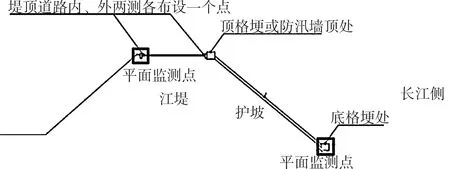
图1 堤防监测断面点位布置
1.2 布网
一级GPS网采用同步图形扩展式布网[3-4]原则,优先连测短基线,以点连式和边连式的混连式为主。全网共98点(其中16个已知点、82个未知点),构成有99个同步环、 64个独立闭合环,同步环、独立环的闭合差均小于限差,独立环3边环46个,4边环18个。
1.3 观测
采用4台GPS接收机按一级GPS网的要求进行同步观测[5-7]。观测时,一级GPS网中的点号按其点名(号)进行编号。
采用快速静态作业模式进行观测,外业观测时,仪器主要参数设置如下。
(1)最小卫星截止高度角为15°;
(2)数据采集间隔为5″;
(3)最短有效观测时间为20 min;
(4)最大PDOP值为3.0;
(5)最少有效观测卫星数为6颗;
(6)平均重复设站数为2.2个。
外业观测过程中严格按GPS操作手册要求作业,对接收机天线高用随机备有的直角杆设备观测前和观测后各量取1次并取中数使用,其最大互差为1 mm,限差为3 m。
1.4 平差计算
采用专业软件算出所有独立基线和同步基线,检验合格后计算重复基线差值、同步环闭合差、独立环闭合差,进而完成三维网无约束平差和二维网约束平差,实现全网基线向量质量和符合精度情况的检验。
1.5 精度统计
精度指标[5]包括:同步环、独立环坐标分量闭合差、最弱点点位中误差、最弱边相对中误差、基线向量改正数绝对值等。
同步环闭合差精度统计见表1,独立环闭合差检核精度统计见表2,其他精度指标见表3。
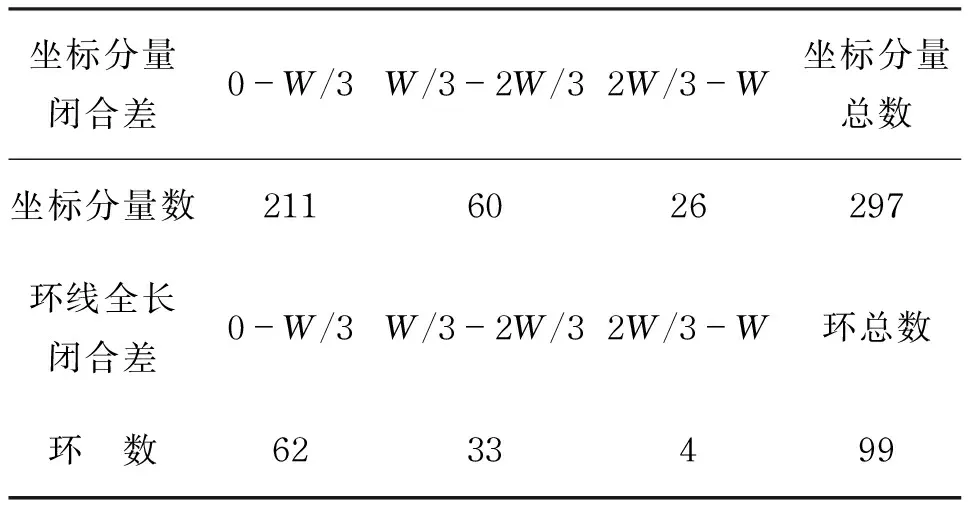
表1 同步环闭合差精度统计
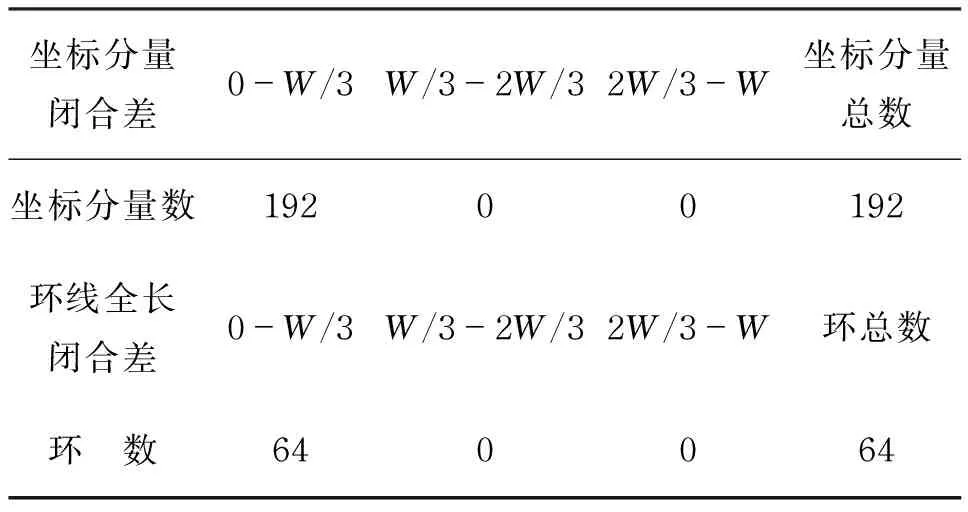
表2 独立环闭合差检核精度统计
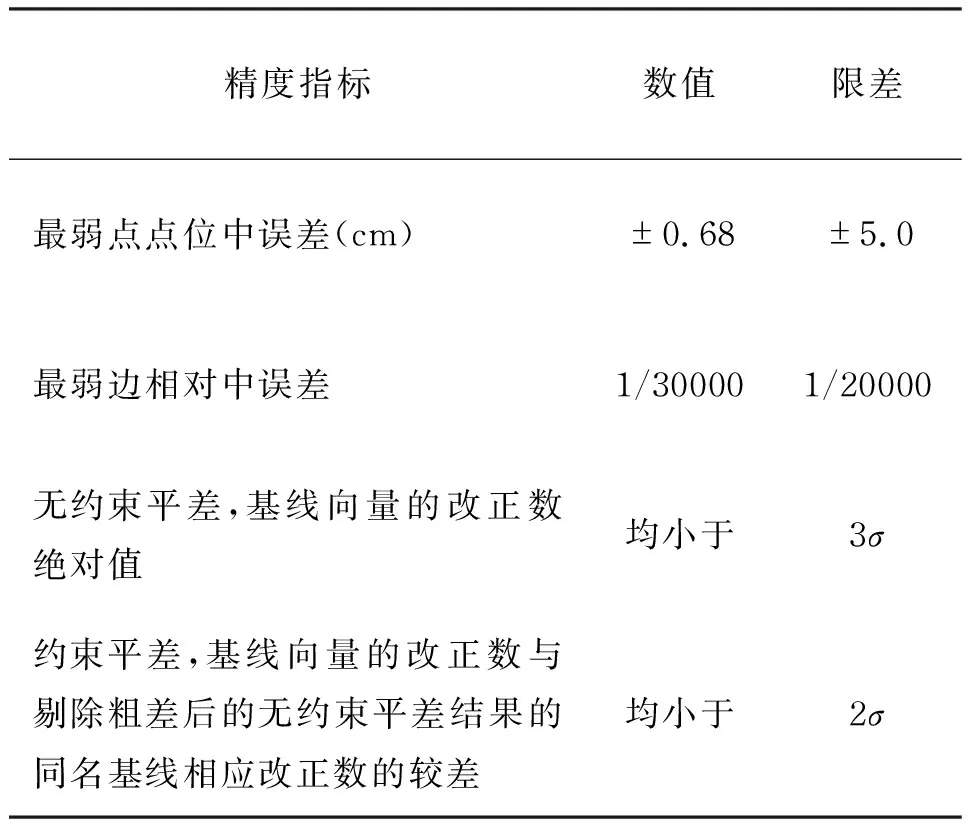
表3 其他精度指标
1.6 监测分析
由表1、表2、表3中统计值可知,无约束平差结果表明全网中没有残余的粗差基线向量,其内符合精度优良。二维约束平差结果表明网型结构较强,精度优良,其他各项指标符合一等GPS测量规[6-7]的要求。因此,汛期前获得的GPS观测网(即是固定断面监测点的高精度的平面坐标)可以作为汛期后判断长江堤防是否发生微小形变以及判断是否可能影响安全运营的基础依据。
2 汛后监测
汛后再次采用静态GPS测量技术进行观测,在观测、平差计算、精度统计后判断测量成果的可靠性。各项精度指标如表4、表5、表6所示。
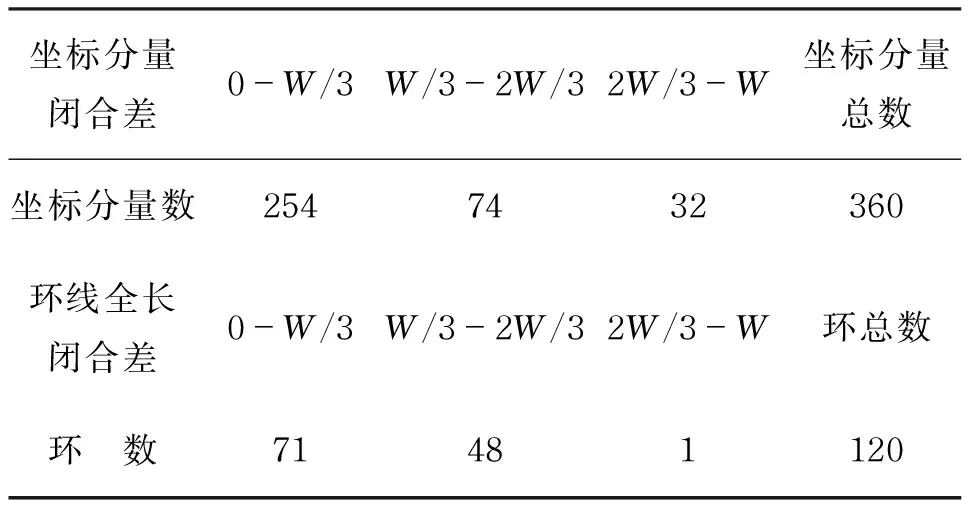
表4 同步环闭合差精度
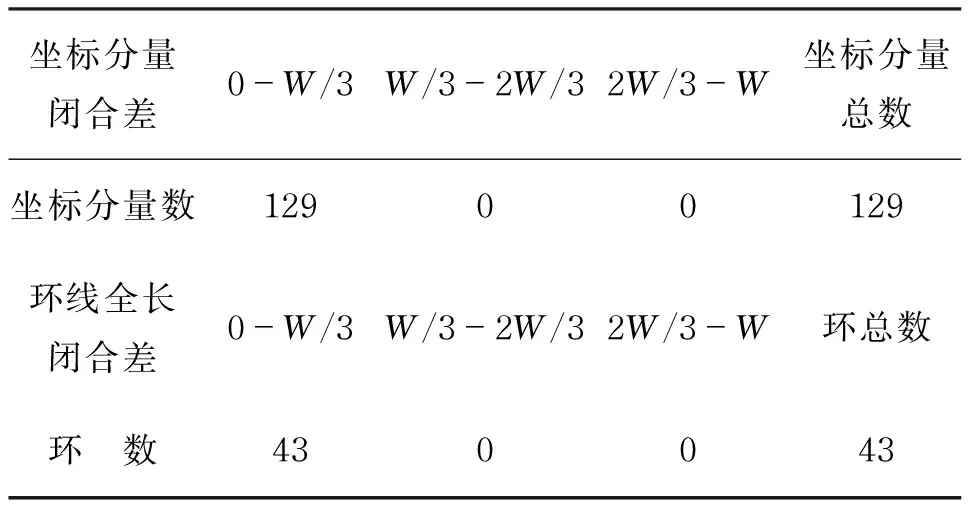
表5 独立环闭合差检核精度
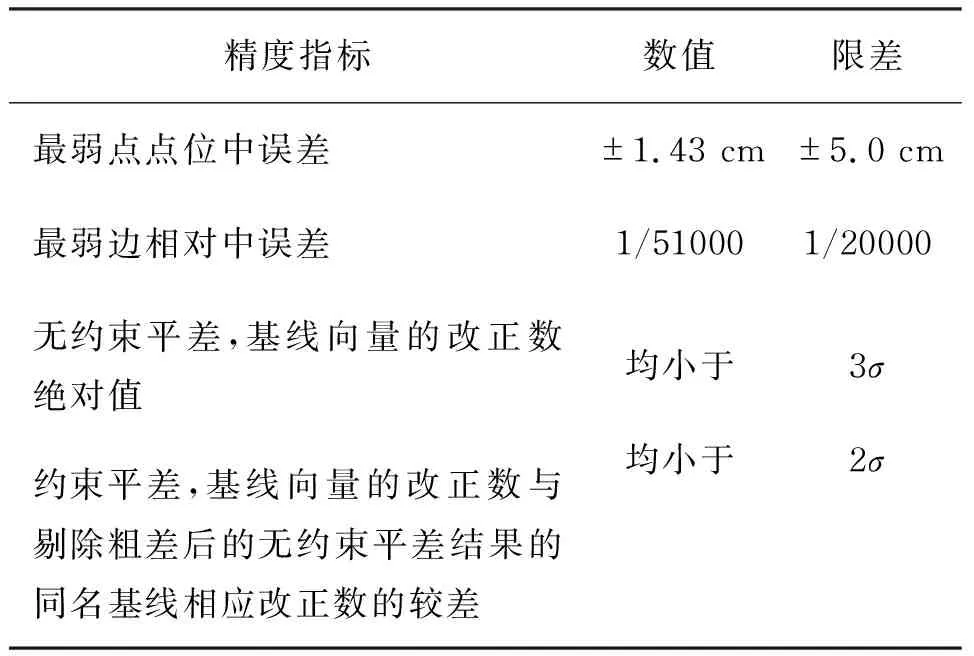
表6 其他精度指标统计
由表4、表5、表6中统计值可知,汛期后(第二次)静态GPS测量结果(各项精度指标)同样符合一等GPS测量规范,因此能够真实体现出汛期后长江堤防上固定断面的实际情况,即可作为对比分析堤防是否出现微小形变以及判断是否可能影响安全运行的证据源。
3 分析与结论
定义首次观测的每条堤防断面两监测点连线为标准基线,第二次及之后测量的监测点坐标沿基线方向的变化量为水平位移量,迎水面为“下”,背水面为“上”。统计发现,水平位移量大于20 mm的共计有3个点位,经过现场核实,是由于现场施工点位发生位移;其他迎水面变化量最大值为15 mm,迎水面位移量最小值为0 mm;背水面变化量最大值为13 mm,背水面位移量最小值为1 mm。结果表明,长江(张家港段)堤防的水平位移值较小,整体上没有异常水平位移,状态基本稳定。
应用该技术的同时,采用传统的人工巡视方式进行验证,现场反馈的结果与静态GPS测量的结论一致,长江(张家港段)堤防可保持安全运行。因此,静态GPS测量技术可以作为堤防安全运行监测的有效手段,其测量成果结论可以作为管理堤防、判断决策的依据。另外,随着基础数据的积累和丰富,以时间为横轴,实现对各监测位移量的预测分析,进而提前预警,发挥其在堤防监测分析中的最大化效果。
