车辆主动悬架系统LQR的多种群遗传优化算法*
2021-11-03王东云黄安穴平燕娜刘新玉
王东云 黄安穴,2 平燕娜 刘新玉
车辆主动悬架系统LQR的多种群遗传优化算法*
王东云1黄安穴1,2平燕娜1刘新玉1
(1.黄淮学院智能制造学院,河南 驻马店 463000 2.中原工学院电子信息学院,河南 郑州 451191)
车辆主动悬架系统的线性二次型调节器(LQR)因结构简单、易于实现而得到广泛应用,但其目标函数最优参数确定的问题还没有公认的解决方法。为此,利用遗传算法的群体搜索特性,提出一种基于多种群遗传算法的LQR参数优化策略。仿真结果表明:与传统遗传算法优化的LQR及无优化LQR相比,多种群遗传算法在悬架动行程、轮胎动位移和车身垂向加速度3个指标的平均性能上,分别提高了2.26%和33.55%,增加汽车的运行平顺性、操纵稳定性和乘坐舒适性。
车辆主动悬架系统;线性二次型调节器;多种群遗传算法
0 引言
车辆悬架系统与汽车的运行平顺性、操纵稳定性和乘坐舒适性相关[1]。根据悬架结构形式可分为被动、半主动和主动3种类型。目前已有研究证实:在保证同样车轮跳动量的前提下,采用主动悬架系统的车辆性能比被动和半主动悬架系统至多可提高20%[2-3]。这是因为主动悬架系统根据外部的行车环境和车身状况,主动产生所需的控制力并进行调整。
悬架系统在理论上是一个受随机路面激励的非线性系统[4]。良好的控制策略是车辆主动悬架系统获得最优性能的重要保证。目前,国内外研究者提出的车辆主动悬架系统的控制策略有最优控制、鲁棒控制、自适应控制、模糊控制、H∞控制等[5-8]。其中,线性二次型调节器(linear quadratic regulator, LQR)因成本低廉、性能出众、实现方法简单而得到广泛应用[9-10]。
一般采用悬架动行程、轮胎动位移和车身垂向加速度3个指标的加权和作为车辆主动悬架系统的LQR参数选择的目标函数[11]。目前,这3个指标的加权系数主要凭设计者的经验确定。尽管国内外研究者提出一些不依赖于个人经验的参数优化算法[9],但结果并不令人满意。
为此,利用经典的1/4车主动悬架模型,结合上述3个指标构建LQR参数优化的目标函数,本文提出一种基于多种群遗传算法的优化策略。
1 车辆主动悬架系统模型构建
车辆主动悬架系统的简化模型有1/4车模型、1/2车模型或整车模型。其中1/4车主动悬架模型形式简单、易于实现,本文选择其作为简化模型,物理模型如图1所示。

图1 1/4车主动悬架的简化物理模型
由图1可知,1/4车主动悬架简化物理模型可用一个二自由度的弹簧-阻尼-质量系统进行模拟[9]。
利用牛顿第二定律,1/4车主动悬架系统的动力学方程可表示为[9]
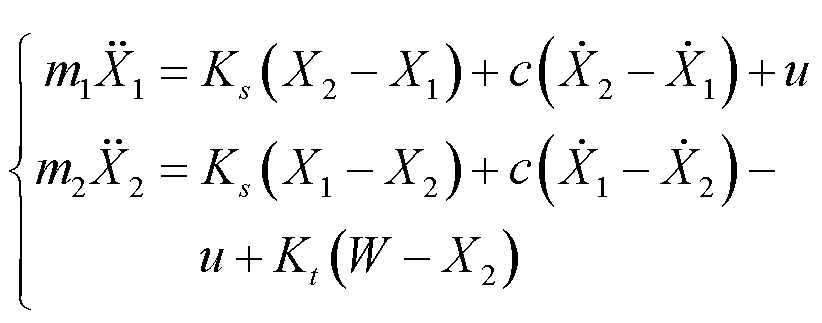
式中,为悬架阻尼系数;为悬架动力装置施加的力,即主控制力。
2 车辆主动悬架系统LQR优化
2.1 LQR目标函数
一般利用悬架动行程表征汽车运行平顺性;轮胎动位移表征汽车操纵稳定性;车身垂向加速度表征乘坐舒适性。根据上述3个指标可将控制的目标函数表示为[9]



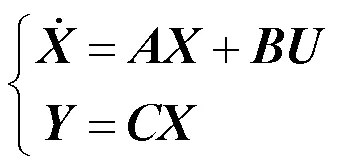
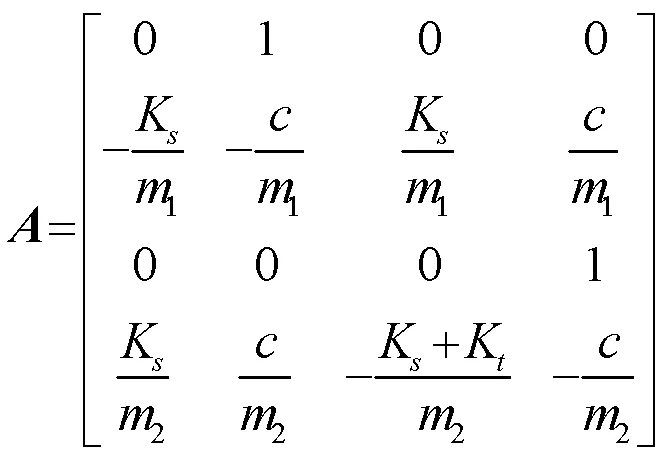
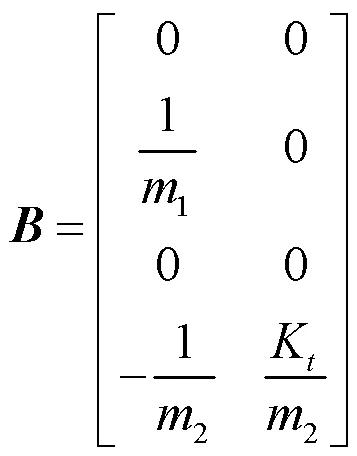
为获得这3个指标的最优组合,根据LQR控制原理,将式(3)转换为

LQR的最优控制力为


LQR参数的确定取决于加权矩阵的选择,而加权矩阵没有固定的计算方法,往往基于使用者的个人经验,降低了获得最优解的概率。利用优化算法获得加权矩阵的最优解是可行途径之一。
2.2 LQR多种群遗传算法
遗传算法(genetic algorithm, GA)是一种具有群体搜索特性的全局优化算法,其在迭代过程中采用交叉、变异等操作使种群朝最优方向进化,最终得到目标函数的最优解。GA直接以目标函数值作为搜索目标,使用适应度函数值来度量个体的优良程度,不涉及目标函数值的求导求微分过程,因此没有应用条件限制,扩展了应用范围。但GA编码时易出现不规范、不准确等问题,且容易过早收敛,进入局部最优。
为此,利用多种群GA算法(multiple population genetic algorithm, MPGA)对LQR进行优化。MPGA与传统GA相比具有以下优势:1)突破GA仅靠单个群体进化的框架,引入多个种群同时优化搜索,不同的种群赋以不同的控制参数,实现不同的搜索目的;2)各个种群之间通过移民算子进行数据交换,实现种群之间的协同进化,最优解则是种群之间协同进化的综合结果;3)通过人工选择算子保存各种群进化代中的最优个体,并作为判断算法收敛的依据,避免传统算法过早收敛的问题。
MPGA具体步骤如下:
1)针对LQR的目标函数产生3个初始种群,种群规模为100,迭代遗传次数为20,交叉概率为0.4,变异概率为0.15,精英数目为10;
2)采用传统GA流程把每个种群的每个个体的值依次赋值给1、2、3,计算主动悬架的适应度函数值;
3)在每个种群中选取一定数量的最优个体组成精英种群,计算精英种群中各个个体的适应度函数值,如果满足遗传算法的终止条件则退出迭代并输出最优个体,否则转至步骤4);
4)依次对每个种群的个体进行选择、交叉和变异操作以产生新的种群,并转至步骤2),再进行循环,直至获得最优加权系数组合。
2.3 优化算法性能评估指标
为有效评价MPGA的优化性能,利用Matlab中的Simulink工具箱对LQR进行建模,计算不同优化算法获得的悬架动行程、轮胎动位移和车身垂向加速度,并与传统遗传算法优化的LQR及无优化LQR相比,结果用均值±标准差的形式给出。

3 系统仿真与结果分析
3.1 控制系统Simulink模型构建
1/4车主动悬架LQR的Simulink模型的实现如图2所示。

图2 1/4车主动悬架LQR的Simulink模型实现

3.2 不同算法控制性能对比
为验证MPGA的优化性能,利用车身垂向加速度、悬架动行程和轮胎动位移3个指标对比多种群遗传算法的LQR(LQR_mpga)、传统遗传算法的LQR(LQR_ga)和无优化LQR(LQR)的控制性能。这3个指标值越小表示汽车的运行性能越优异。图3给出了时长为10 s的上述3个指标的动态变化曲线,其中下面小图为上面图形的其局部放大图。由图3可知,MPGA的优化性能优于GA和无优化LQR。

图3 3种算法优化性能对比
不同算法获得的LQR参数的性能对比如表1所示。
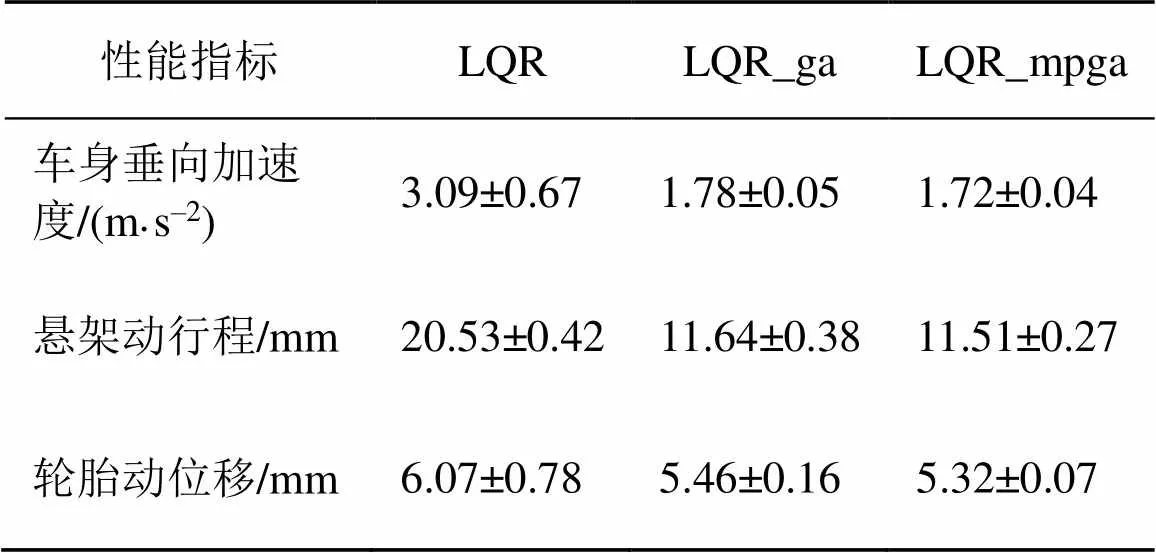
表1 不同算法获得的LQR参数性能对比
由表1可知:MPGA的车身垂向加速度相比于传统GA和无优化LQR分别提高了3.37%和44.34%;悬架动行程相比于传统GA和无优化LQR分别提高了1.12%和43.94%;轮胎动位移相比于传统GA和无优化LQR分别提高了2.56%和12.36%;整体上,相比于传统GA和无优化LQR分别提高了2.26%和33.55%。
4 结论
本文针对车辆主动悬架系统LQR优化控制,构建1/4车主动悬架控制模型,建立LQR目标函数,并利用MPGA对其进行优化。仿真结果表明:MPGA具有更好的控制性能,车身垂向加速度、悬架动行程和轮胎动位移都有较明显的减小,提高了汽车的运行平顺性、操纵稳定性和乘坐舒适性。
[1] 来飞,胡博.汽车主动悬架技术的研究现状[J].南京理工大学学报,2019,43(4):518-526.
[2] TSENG H E, HROVAT D. State of the art survey: active and semi-active suspension control[J].Vehicle System Dynamics, 2015,53(7):1034-1062.
[3] 赵旖旎,阎堃,葛栿松,等.车辆座椅减振系统的研究进展[J]. 工程机械,2019,50(7):61-69,8.
[4] 王维强,刘颖.车辆主动悬架协调控制技术研究[J].机械设计与制造,2019(10):123-126.
[5] 李军,方春杰.采用人群搜索算法的汽车半主动悬架LQG控制[J].华侨大学学报(自然科学版),2017,38(4):446-451.
[6] 孟杰,陈庆樟,张凯.基于模拟退火算法的汽车悬架最优控制研究[J].重庆交通大学学报(自然科学版),2013,32(3):497- 501.
[7] HAN Shiyuan, ZHONG Xiaofang, CHEN Yuehui, et al. Fuzzy guaranteed cost H∞control of uncertain nonlinear fuzzy vehicle active suspension with random actuator delay[J]. International Journal of Fuzzy Systems, 2019,21(7):2021-2031
[8] LONG Guimin, DING Fei, ZHANG Nong, et al. Regenerative active suspension system with residual energy for in-wheel motor driven electric vehicle[J]. Applied Energy, 2020,260: 114180.
[9] 刘晓培.基于遗传算法的汽车行主动悬架LQR控制器的优化设计[J].组合机床与自动化加工技术,2013(6):78-80.
[10] 谢伟,赵波,蒋培露.基于遗传算法的主动悬架最优控制研究[J].农业装备与车辆工程,2019,57(8):78-81.
[11] 李献,骆志伟.精通MATLAB/Simulink系统仿真[M].北京:清华大学出版社,2015.
[12] 李洁,刘耿硕.基于MATLAB的汽车悬架系统仿真研究[J].河北工程大学学报(自然科学版),2019,36(2):97-100.
Multi-population Genetic Optimization of LQR for Vehicle Active Suspension System
Wang Dongyun1Huang Anxue1,2Ping Yanna1Liu Xinyu1
(1.School of Intelligent Manufacturing, Huanghuai University, Zhumadian 463000, China 2. School of Electronic Information, Zhongyuan University of Technology, Zhengzhou 451191, China)
Linear quadratic optimal (LQR) control of vehicle active suspension system has been widely used because of its simple structure and easy realization, but there is no recognized solution to the problem of determining the optimal parameters of its objective function. Therefore, aiming at the problem of determining the optimal parameters of LQR controller for active suspension system, a LQR controller parameter optimization strategy based on multi population genetic algorithm is proposed by using the population search characteristics of genetic algorithm, in order to obtain the optimal values of parameters. The results show that, compared with the traditional genetic algorithm optimization and no optimization, the average performance of the multi population genetic algorithm is improved by 2.26% and 33.55% respectively in the three indexes of body vertical acceleration, suspension dynamic travel and tire dynamic displacement. The results show that the optimal parameters of LQR controller of active suspension system obtained by multi population genetic algorithm have positive significance for improving the ride comfort, handling stability and riding comfort of vehicles.
vehicle active suspension system; linear quadratic regulator; multi-population genetic algorithm
王东云,男,1964年生,博士,教授,主要研究方向:智能制造与控制。E-mail: wangdongyun@huanghuai.edu.cn
黄安穴,男,1992年生,硕士研究生,主要研究方向:智能制造与控制。
平燕娜,女,1986年生,硕士,讲师,主要研究方向:自动化。
刘新玉,男,1987年生,博士,讲师,主要研究方向:智能脑机与人机系统。
基金项目:河南省驻马店产业发展重大项目(2019ZDA01)
U461.4
A
1674-2605(2021)05-0003-05
10.3969/j.issn.1674-2605.2021.05.003
