摇杆式工业遥控器在大吨位起重机上的应用
2021-11-03刘德林
刘德林
(中车戚墅堰机车有限公司,江苏常州 213011)
0 引言
当前,各种类型的起重机在工业企业、流通领域等广泛使用,其中桥式起重机传统的操作方式是起重机司机在司机室内进行各项操作,而司机在起重机司机室内工作时,往往要受到高温、有害气体、含尘介质以及振动等影响,且在操作过程中,无法自由选择操作视角、视线和操作距离,起重机司机容易产生操作疲劳,并且当操作人员与指挥人员距离较远时,可能会由于误判,出现操作失误,在需要精确定位的场合表现的尤为突出,而采用起重机无线遥控控制就可完美解决这个问题。
1 工业无线遥控技术运用的优势
工业无线遥控技术主要是通过无线发射器将人的操作指令,经过数字化编码加密后,通过无线的方式传递给远端的接收系统,从而实现对各种机械设备的控制,同时要求在强磁场、强电磁以及无线电信号复杂的环境中,具有百分之百的抗干扰能力。由于采用最先进的控制和通信技术,每种遥控系统都使用无法复制的唯一代码,从而有效避免相互之间的干扰和误动作。
采用无线遥控方式操作控制起重机,将起重机司机从高空移至地面,可直接与生产人员联系,共同配合控制起重机,进一步提高吊装的准确性和安全性。当然,用无线遥控器操作起重机更需要保证设备运行平稳、安全可靠和动作灵活准确,并要避免因高温粉尘和强电磁干扰等环境因素的影响,造成遥控系统控制失效和误动作。
2 桥式起重机工业无线遥控技术改造案例
基于上述原因,公司在一台QD30/5-16.5 A5 桥式起重机上选用高可靠性的意大利奥泰克CAAJS 系列四机构五速摇杆式工业遥控器,在保留起重机原有操作方式不变,具备原有的各项安全保护功能的前提下,通过转换开关YK,按照工作需要切换司机室操作与遥控操作方式,并且这两种操作模式之间通过YK 和继电器K00、KQ、KP 进行可靠的联锁保护,有效防止使用者忘记切换操作模式带来的安全问题。通过操作遥控发射器各机构摇杆的档位配合加装的遥控电路和遥控柜来实现各档位的加减速控制。
CAAJS 系列四机构五速摇杆式工业遥控器如图1 所示,两种操作模式切换电路如图2 所示,遥控控制电路如图3 所示。
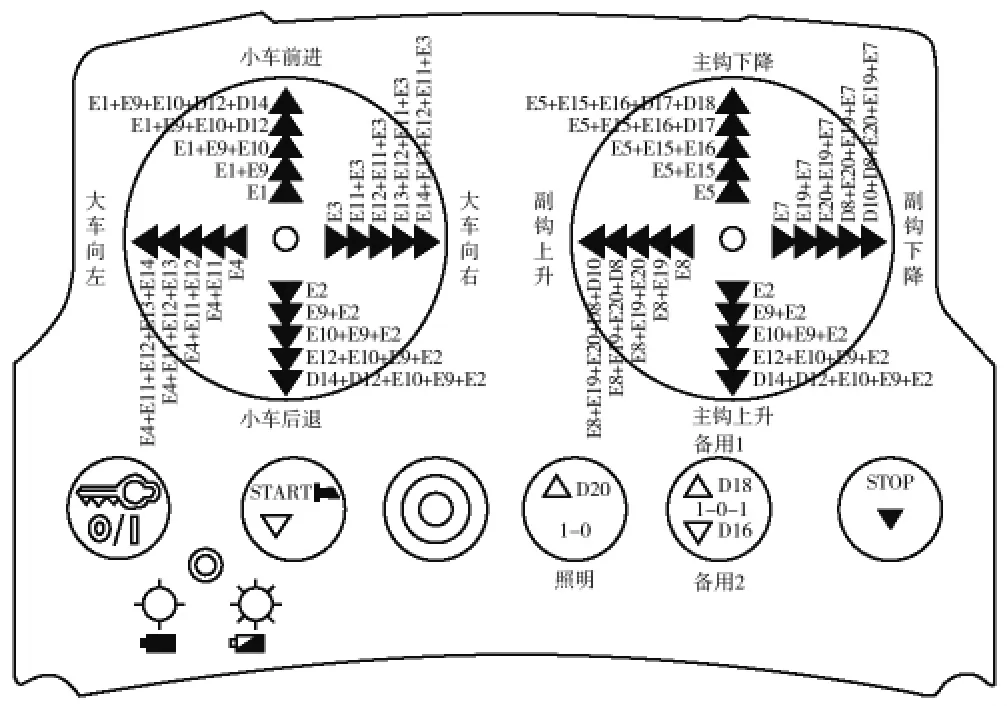
图1 CAAJS 系列四机构五速摇杆式工业遥控器

图2 两种操作模式切换电路

图3 遥控控制电路
根据原有起重机的电气控制原理:副钩、大车和小车凸轮控制器+不对称切除电机电阻器调速。遥控操作时,副钩、大车和小车分别通过KF1~KF6、KD1~KD7 和KX1~KX6,交流接触器控制各机构运行方向和不对称切除电机电阻器进行5 挡调速;KF1、KD1~KD2 和KX1~KX2 辅助触点控制各机构的行程限位。转换开关YK 切换在驾控模式时,确保遥控接收器电源不得电,遥控回路无输出;转换开关YK 切换在遥控模式时,K00 切断驾控起动回路和JLC 主交流接触器的自保回路,遥控模式通过KQ 起动,通过KP 停止,并与副钩、大车和小车凸轮控制器的零位联锁,保证在遥控工作模式下各机构凸轮控制器必须始终确保在零位上。电铃、照明分别通过遥控发射器上的开关控制继电器KW、接触器TL 实现遥控控制。
主钩主令控制器+PQR10 控制屏+平衡切除电机电阻器调速。遥控操作时,继电器K00 辅助触点实现零位联锁,保证在遥控工作模式下主钩主令控制器必须始终确保在零位上。继电器KS1~KS12通过逻辑组合,模拟实现主令控制器上升、下降各挡位触点的闭合状态,利用原有的主钩控制屏进行上升、下降和各挡位的调速控制。由于该型号摇杆式工业遥控器为四机构五速型,故本方案主钩上升、下降第六档速度是在主钩摇杆拨到五速时,通过时间继电器KT1 延时1 s 闭合控制继电器KS6、KS12,再通过接触器4aJ 自动平衡切除电阻来实现。主钩电机电阻器调速主电路如图4 所示,主钩电机电阻器调速控制电路如图5 所示。

图4 主钩电机电阻器调速主电路

图5 主钩电机电阻器调速控制电路
3 结束语
为保证各机构能长期安全、可靠运行,在设计方案时适当加大副钩、大车和小车电源交流接触器KF1~KF2、KD1~KD2 和KX1~KX2 的容量。通过3 年多的运行,遥控操作方便、安全、可靠,运行状态良好,有效解决精确定位控制,并降低相关人力资源成本。
