基于智能处理的水面垃圾清理器控制系统研究
2021-11-03胡中泽
胡中泽
(铜陵学院 安徽省铜陵市 244000)
水体资源是整个生态环境中的重要组成部分,但是伴随着近年来工业生产的逐步推进,人工加上产业对于污染物的排放将造成水面漂浮物污染,严重影响整个水生态系统。与此同时,伴随着水体流向的作用,整个漂浮物所呈现出的流动性特征要造成大范围的污染。而传统人工打捞的形式只是驾驶船对范围区域内的污染物进行打捞,存在工作效率低、资源耗费大的现象。在先进科学技术的支撑下,基于智能处理的水面垃圾清理控制系统的建设,则可以将技术与智能化设备相整合,针对区域内的水面漂浮物进行智能化识别处理,然后通过一体化的操作,保证垃圾打捞与存储的规范性,降低人力资源的消耗。本文则是针对水面垃圾清理器控制系统进行探讨,仅供参考。
1 基于智能处理的水面垃圾清理控制系统框架设计
在对水面垃圾清理控制系统进行设计时,主要是以整个处理功能所呈现出的诉求点为基础,构设出基于智能处理与终端操控部件相整合的系统框架,保证在无人驾驶过程中可以真正实现以传感器信息采集及识别为处理基础,以中央调控系统为数据感知结构,以终端操控机构为垃圾清理载体,通过内部精密算法对不同的数据信息进行及时查找,确保每一类指令下达的精准性符合水面垃圾控制诉求。
本文所采用的是STM32F407ZGT6 作为主体控制芯片,无线通讯模块作为双向通信控制单元,以手机控制终端作为信息传输载体,整个系统在处理过程中可以实现自动避障数据精准识别,无需人员参与。在清理器工作过程中则是采用节能型、环保型、低耗型的锂电池装置配备直流电动机,驱动清理器的运行。与此同时,电机控制过程中是采用PID 经济算法进行内部精准控制。整个系统由两区域组成,上位区域与下位区域。其中上位区域是指应用程序软件,针对控制器运行状态以及终端传感器所传递到的反馈信息进行实时显示,了解到设备在水面的运行情况并控制清理器进行终端运转。下位区域则是指主要驱动结构,以单片机为核心,Wi-Fi 模块双向通讯模块为信息传输载体,以摄像机为传感装置(且摄像机搭载舵机云台,拓展摄像机的成像范围,提高控制精度),红外线避障模块、直流电机等作为主体驱动装置。如图1 所示,水面垃圾清理器系统结构。
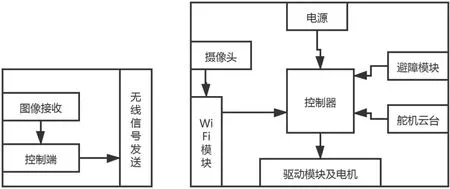
图1:水面垃圾清理器系统结构
此类系统在功能实现过程中,其具有高效率性、高精度性,可以通过无线通讯以及有线通讯等将水面运行情况进行采集与分析,结合内部控制器针对水面垃圾所呈现出的空间点位进行智能识别。当此类信息反馈到终端处理系统中,可以制定出更为完整的规避路径,例如,将水面处理器外部结构所占据的体积与水面环境的障碍物进行参数分析,有效避免水面处理器在运行过程中产生碰撞问题。除此之外,此类系统所采用的单片机以及主控制芯片具有可拓展功能,在技术实时更新下,可针对此类芯片进行拓展,符合高质量的操作需求。
2 水面垃圾清理器硬件系统设计
2.1 单片机系统设计
本文采用的STM32F407ZGT6 作为主体控制芯片,其具有32位处理,最高主频率可以达到168MHz,芯片具有24 个I/O 处理接口以及USART 通讯接口,在计算时可以通过PID 精密算法以及各类计算理论,对整个复杂性的操控系统进行逻辑性预算,确保不同终端在进行信息反馈时可以得到同一时间的多类别数据节点,有效提高整体计算精度。
2.2 Wi-Fi模块设计
Wi-Fi 模块在设计时是选用T-pink 路由器作为主体连接源,在整个Wi-Fi 终端安装固定摄像头以及信号解析软件,确保外界采集到的信号信息,可以通过接收实现对数据包的定向化推送。例如上位机与下位机的数据关联,可以通过串口连接口等将信息实现单片串行通讯,保证摄像头与Wi-Fi 模块产生的信息连通渠道是符合整个系统对于水面信息的采集诉求,进而确保数据信息传输的时效性,提高整体控制精度。
2.3 舵机云台
舵机云台装置的安设是搭载摄像头实现多维度测量,其本身所具备的360 度旋转功能,可以令摄像头工作过程中变得视野更为开阔。但是在舵机云台工作过程时期所呈现出的耗电需求较大,这就需要在与单片机进行链接时,针对舵机云台的工作属性设定独立的驱动板装置,确保各类控制信号在发送与接收时,可以直接通过Wi-Fi 控制机构与中央控制机构进行连接,通过信号值输出,对舵机云台的工作角度进行精细化驱动,满足整个设备的视野采集需求。
2.4 避障模块设计
水面垃圾清理器在运行过程中,主要是针对运行路径之内的水面污染物进行清除处理。但是,在清理器行驶过程中,由于水面环境的多变性,其所产生的障碍物,将影响整个清理器的运行,一旦清理器与障碍物产生碰撞及定障碍物造成损毁问题。避障模块的设计则是令清理器具备数据可识别功能,规避行驶过程中所产生的碰撞问题,此类模块主要是搭载红外传感器、光电传感器,将信号按照一定频率进行发射接收,这样在清理器行驶的过程中,可以依据红外线扫描以及反馈信息,及时查证出当前行驶区域以及行驶路线中是否存在障碍物。在实际驱动阶段,整个红外信号是通过单片机以及控制电击作为主驱动源,结合系统精密算法,分析出机器在行驶过程中的各类避障信息,并按照现有的运行速率,将机器与障碍物之间的距离,设定出最优化行驶路径,保证机器设备运作的持续性。
2.5 电机与驱动模块设计
直流电机作为水面清理器运行的主体驱动源,整个电机驱动形式是采用PWM,直流电机的操作是以单片机进行调速处理的,通过与具有双驱动功能的L298N 驱动芯片进行对接,保证在不同区位内进行指令发送,可以直接通过Wi-Fi 模块信号将指令传输到固定区域,对直流电机的正转与反转进行对接控制。电机内部采用的是PAD 算法,对整个操控模式进行精度控制与调节,这样即便是在外界复杂工作环境下,也可以保证清理器的可靠性运作。例如直流电机在运行过程中PWM 信号的增大与降低,对电机速度设定一个极限值,如果处于调高或调低状态时,电机本身所产生的输出信号是以实际工作值为基准,即为在指令下达的情况下,需要达到特定的停止区域才可以实现下一阶段的控制,不会因为指令下达而突然产生变化,此类过程中的过渡区,则可以有效保证电机运行的稳定性。
2.6 电源稳压电路控制系统
电路作为水面清理器运行的重要组成部分,通过电流输送保证各类模块驱动的稳定性,例如上位基于Wi-Fi 模块以及串口通讯软件等,其均需要电路链接完成一系列的源驱动,确保每一类指令下达与执行的对接性,保证垃圾清理终端机构运行以及传感器装置空间运作是符合整个水面垃圾清理器采集及处理诉求的。
2.7 遥控辅助系统
遥控辅助系统是指针对各类信号线以及无线传输进行远程操控,其可以有效将整个操控模式独立于设备内部运行机构,通过接收器与遥控器关联,对不同机构进行信号驱动。例如,在对油门进行控制时,可以将整个主系统的中央操控机构与分系统油门控制机构进行对接,通过遥控装置进行信号调节,反馈到油门操作系统中,对各项输入信号及指令予以执行处理,完成油门调速,确保在智能控制条件下,也可以通过人工操控进行整体状态的调整,更为精准的对水面垃圾进行处理。
3 水面垃圾清理器软件系统设计
3.1 红外检测程序
在对红外检测程序进行设计时,主要是通过模块引脚本身所处于的电平状态,分析出当前检测区域是否存在垃圾或者是垃圾在采集过程中所产生的一系列状态。对于此,在进行设计过程中,应先针对整个系统进行初始化判定,设定出低电平与高电平在不同状态下的外部特征。其中标志位为1,则代表当前机器中的垃圾处于充满状态,此时系统在接收指令时,则需要针对整个控制电梯进行减速处理,保证后续工作不会影响到及其设备。如果在信号输出过程中,引脚处属于高电平状态,则整个信息将进行反馈,继续执行控制指令,确保垃圾采集器运行的持续性。
3.2 电调驱动程序
在对电调驱动程序进行设计时,是按照现有单片机芯片PWM所占据的空间比例进行设定。在程序设计中,应先对数字化定时器进行初始处理,将定时器中的时间变化单位与电调驱动程序进行关联,这样才可以保证驱动特征是符合定时器时间变化规律的,从而达到对整个驱动程序的有效调节。例如,在电调过程中通过油门信号高低变化,分析出电机起动过程中应当遵循的数据,结合电机转速的档位,分别将不同电机的驱动模式进行固定,例如直线行驶以及转向行驶等。这样一来,通过主动程序的控制,可以将整个PC控制终端与单片机进行关联,实时调取出当前机器设备运行路径,通过数据值之间的比对将整个标志位置进行定位处理。
3.3 系统程序
在对清理器系统进行设计时,采用C 语言进行辨析,确保整个程序控制是符合多模块驱动诉求的。例如,Wi-Fi 信号传输模块、红外线模块以及舵机云台模块等,在多位联动处理下,保证信号系统在传输时可以将整个采集信息与外界信息进行关联,确保上位机在运行过程中可以通过多指令调节驱动预设程序,满足整个水面垃圾清理机器的运行需求。
4 基于智能处理的水面垃圾清理器控制系统调试及实现
在设计完软硬件系统时,需要对整个系统进行调试处理。
(1)对系统进行电源驱动,如果各个单元机构指示灯亮,则代表此系统初始运行是符合系统设定需求的。
(2)按照相对应的指令对机器进行驱动处理,例如调节油门状态,在系统接收信号以后查证出电机是否正常运作。
(3)通过主体单片机的控制对不同模块进行分别驱动处理,例如机器设备的前后左右转向以及急停、舵机运转、终端垃圾处理机构的空间操作。
此类系统调试方法是通过全过程、全方位性的机器操作,确保每一类设备及机构在运行过程中是符合前期设计基准的,且不同部件的操控性能可以在整个系统运行周期之下完成精细化、可靠化的操作及处理。
在具体实现过程中,水面垃圾清理器的运行可以真正实现自动化操作,当人们输入某一项指令之后,可以通过主芯片系统的协调方式处理,令清理器在水面之上进行移动。通过红外识别扫描系统,可以分析出水面垃圾以及水面障碍物之间的差异性,并反馈到主系统中,令机器通过智能系统,完成一系列的垃圾清理以及避障行驶等,此类自动运行模式,可以有效降低人力资源的消耗,规避风险问题的产生,真正构设出操控体系,为我国生态环境的防护基础保障。
5 结语
综上所述,智能处理支撑下的水面垃圾清洁器控制系统的设计与应用,可将垃圾处理工作与智能系统相整合,打造出智能操控平台,令清洁器设备在水面上实现自动运行。为此,在后续发展过程中,必须进一步加强对技术的应用力度,分析出机器设备的应用属性,真正实现智能化、精度化的协同控制。
