列车检修停靠状态下底板螺栓缺陷自动检测研究
2021-11-03管春玲周金龙卢俊业吕照明
管春玲 周金龙 卢俊业 吕照明
(1.广州铁路职业技术学院 广东省广州市 510430 2.中国铁路广州局集团有限公司广州动车段 广东省广州市 510000)
在工业领域,最常用的连接装置为螺栓,应用于航空航天、海上船舶、桥梁施工、化工设备、新能源建设等多个关键设备之间[1]。螺栓存在多种安装优势,施工过程简单、受力性能较好,具有较强耐久性与耐疲劳性,在动态荷载作用下,螺栓松动概率较小,在可拆卸零件以及荷载传递设备上具有关键性作用。因此,螺栓逐渐成为装备连接与密封的主要部件。
列车上线运行过程中若出现底板螺栓松动现象,引起核心部件受损,列车运行稳定性将受到影响,因此需要在列车上线之前检修停靠状态下,完成底板螺栓缺陷的精确检测及处理,避免乘客生命财产安全受到威胁[2-3]。本文提出列车检修停靠状态下底板螺栓缺陷自动检测研究。
1 列车底板螺栓缺陷自动检测
1.1 基于机器视觉的螺栓图像采集
基于机器视觉的螺栓图像采集系统主程序中主要包括四个关键子程序,即摄像机标定子程序、图像识别与定位子程序、导航子程序、抓取子程序。
摄像机标定子程序:
相机标定子程序作用在于求解相机内外参数,矫正相机畸变镜头,明确相机放置位置。该标定子程序是保证采摘成功的一道保障[4]。
步骤1:建立标定需要的三个层次的坐标系统。
步骤2:(xw, yw, zw)、(x, y, z)分别表示世界与相机坐标系,坐标系之间存在相互转换关系,具体转换形式如下所示:
上式中,T 表示世界坐标系中的原点相机坐标位置,R 表示旋转矩阵形式,该矩阵呈现正交性。假设矩阵满足下述限制要求:

在正交旋转矩阵中,包含独立变量Rx、Ry、Rz,结合相机外部参数tx、ty、tz,决定世界坐标系中相机坐标系的坐标位置[5]。
步骤3:转换图像坐标系与相机坐标系。
假设(x,y)表示图像物理坐标系,像点p 的坐标表示形式如下所示:

齐次坐标表征方式如下所示:
在图像物理坐标系(u,v)中,转换图像坐标系:

上式中,u0、v0表示螺栓缺陷位置坐标,dx、dy表示横纵坐标形式下螺栓缺陷的尺寸大小,sx、sy表示横纵坐标轴上采样频率大小。
在像素坐标系中,存在物点与像点之间的转换,具体转换形式如下所示:

上式中,fx、fy表示在坐标轴横纵向的等效间距大小,fx、fy、u0、v0表示相机内部参数[16]。
步骤4:变换世界坐标系与图像坐标系之间的关系,表征方式如下所示:
齐次坐标具体表征方式如所示:
上式中,M 表示投影矩阵形式,通过相机内外参数矩阵相乘加以表示。在上式中,具体表征针孔模型以及中心投影形式,确定相机内参的限制条件,结合已知的像点与物点的具体坐标,对相机外参加以求解[6]。
1.2 螺栓缺陷检测
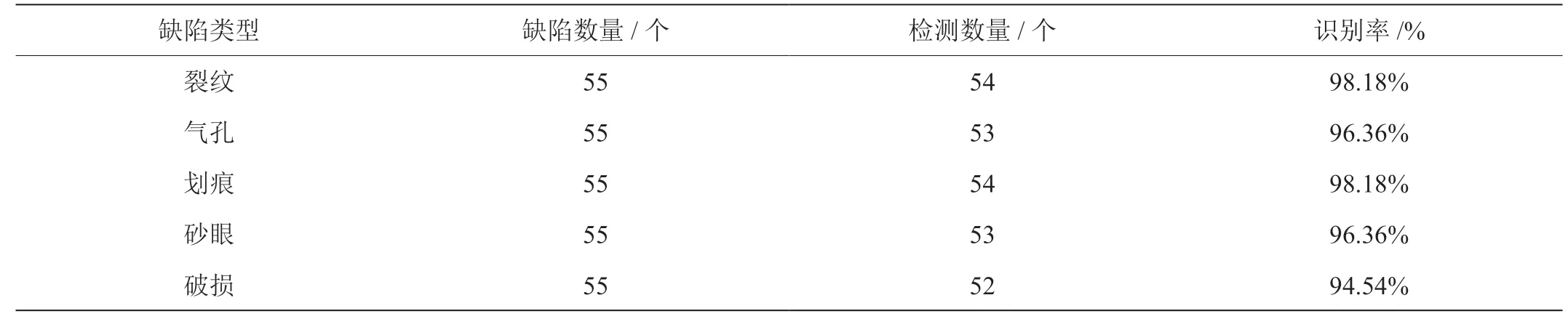
表1:文中方法检测结果
使用稀疏表示方法得到螺栓图像内信号所包含的信息,继而获取螺栓缺陷的具体位置。通过稀疏表示方式,寻找稀疏矩阵x 以及过完字典D,y 表示图像原始信号,信号最大限度表示为D×x,为保证稀疏矩阵x 非零因子数量最少,通过稀疏矩阵稀疏表示图像原始信号y。
假设I 表示螺栓缺陷图像,图像中包括三种线性重叠,具体表征方式如下所示:

上式中,D 表示螺栓缺陷目标,B 表示缺陷背景,N 表示图像噪声大小。在螺栓缺陷目标中,假设存在超完备缺陷字典通过下述进行稀疏解求解:

上式中,表征螺栓缺陷目标超完备转换, 表示合成系数,该系数具有最高稀疏性能[7]。B 表示缺陷背景, 表示缺陷字典,通过上式生成相似的稀疏解。
设定I 表示螺栓缺陷图像,采用稀疏变换,将其转换为下述形式:

上式中,第三项表示原始缺陷图像与重构图像之间的偏差值大小,表征螺栓缺陷图像噪声,λ 表示权重参变量。
将代价函数引入卷积神经函数,确定网络输出值与期望值,确定二者之间误差大小,误差越小表示网络性能越好,代价函数具体表征方式为:

上式中,C表示代价函数,x表示输入值大小,y表示函数输出值,表示函数期望值,c 表示函数中样本总数数量。
在保证代价函数C 最小值的条件下,获取最小值对应的w、b梯度值,求解方法如下所示:

由上式可以看出,w、b 梯度值与输出偏差之间存在一定关联程度,偏差程度与梯度之间呈现正比关系。参变量w、b 调节速率与训练速率之间呈现正相关,调节速率越快,训练速率越快,在代价函数C 最小条件下,求解对应的w、b,将其作为训练核心目标,完成螺栓缺陷位置精确识别。
2 实验研究
为保证缺陷检测结果可行性,进行试验分析。试验相机设备为 1394 数字摄像机,具体型号为DH-HV1310FC/FM,尺寸为1/1.8 英寸,采用CMOS 逐行扫描,分辨率为1280×1024 万像素,通过线结构光扫描仪图获取时间数据。
试验中某部件螺栓图像原始数据点云数据个数为18324 个,经统计滤波操作处理点云数据个数为16124 个,螺栓实际形状受影响较小。通过激光结构光方式,获取列车底板螺栓三维数据,提取螺栓图像特征。
通过运用文中方法,测试螺栓的5 项缺陷类型识别率,具体测试结果如表1 所示。
如表1 实验结果所示,文中方法在裂纹、气孔、划痕、砂眼、破损5 项不同类型缺陷中识别率最低的为破损缺陷检测,识别率达到94.54%,对划痕的识别率最高,识别率达到98.18%。
3 结论
本文基于机器视觉采集螺栓图像,通过稀疏表示方式获取螺栓缺陷图像的具体信息,获取螺栓缺陷位置具体信息。原始图像经过统计滤波处理,图像点云数据个数为16124 个,在裂纹、气孔、划痕、砂眼、破损5 种缺陷类型中,识别率最低的为破损缺陷检测,识别率达到94.54%,对划痕的识别率最高,识别率达到98.18%。
