建筑物内部火灾应急导航定位系统的研究与实现
2021-11-03邬志锋卓璧湖赵军源
邬志锋 卓璧湖 赵军源
(广东交通职业技术学院 广东省广州市 510650)
1 背景
根据应急管理部消防救援局最新统计数据,2020年全国共接报火灾25.2 万起,死亡1183 人,受伤775 人,直接财产损失40.09亿元,造成如此巨大伤亡一个重要的原因就是建筑物内部的被困人员和建筑外部的消防人员都不能准确此时了解建筑物内部可通行的通道,不能明确判断出最安全、快捷的逃生线路和最佳营救路线。
目前对火灾建筑物内部通道畅通情况的探测方法研发、对营救人员定位方法的研究比较少。文献[1~4]提出的是利用消防机器人探测建筑物内部通道。该方法是目前最成熟的方法,做法是通过远程遥控方式操控消防机器人进入建筑物内部,通过其摄像头回传前方视频图像,后面操作人员根据图像分析判断通道损毁程度和火情,再做出救援决策。该方法优势明显,缺点也很显著:首先是摄像头容易受到烟雾的影响;其次是机器人必须是在火情得到有效控制的条件下才能使用,影响了救援的及时性。文献[5~6]提出了使用惯性测量单元(Inertial measurement unit, IMU)的室内定位方法。该方法是使用6 轴或9 轴传感器测量消防员的姿态,然后根据惯性导航原理对消防员进行跟踪,从而得到消防员的实时位置,再根据消防员的行进路线推测火灾建筑物内部通道的情况。这种方法存在两大弊端:首先消防员需要进行火灾建筑物内部,给消防员带来了巨大的生命危险;其次是惯性导航方法存在较大的误差,消防员的定位数据并不准确。文献[7-8]提出了基于Wi-Fi 的消防员室内定位。该方法是通过测量消防员接收到的多个Wi-Fi 接入点的信号强度(Received Signal Strength Indication,RSSI)后计算相互之间的距离,最后通过坐标估算方法进行室内定位。这种方法也存在两个突出的弊端:首先是建筑物起火以后,大部分的Wi-Fi 接入点都会断电;其次RSSI 测量方法是一种估算方法,对于室内小范围定位而言其相对误差极大。
2 实现思路
针对现有消防设施智能化程度低的缺点,本文探索通过加入UWB 传输模块、使用LED 点阵代替固定显示、加装智能传感器等技术手段对消防应急灯进行改造,在建筑物内部构建一个分米级定位精度的定位系统,实现在内部火灾时对受困人员进行室内导航,同时使外部救援人员及时掌握建筑物内部的通道情况、被困人员的分布情况,引导他们从最安全、快捷的通道逃离火场,从而有效降低火灾带来的经济损失、人员伤亡,提高救灾效率,系统构成如图1 所示。
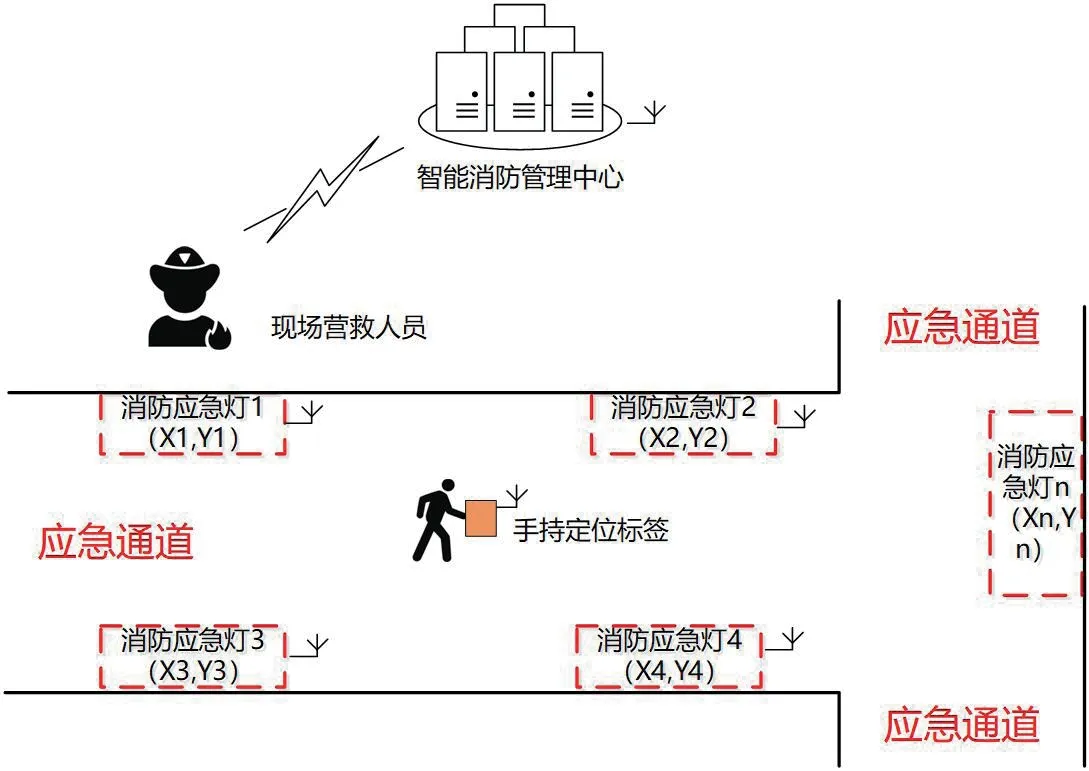
图1:系统框图
本系统主要由智能消防应急灯、手持定位标签、智能消防管理中心三部分构成。智能消防应急灯除了具有传统的消防应急灯的功能外还起到了定位基站、环境数据收集的作用,其通过NB-IoT 模块与智能消防管理中心进行通信。手持定位标签的主要作用确定被困人员在建筑物中的位置。智能消防管理中心的主要作用是平时对消防设备进行日常巡检,火灾时通过手持式标签的定位数据确定被困人员的位置并通过对环境数据的分析为被困人员提供最佳逃生线路。
3 硬件设计
3.1 智能消防应急灯
智能消防应急灯不仅具有传统的消防应急灯火灾时为应急疏散通道提供照明的功能,同时还具备定位基站和环境状态收集的功能,主要电路图2 所示。
如图2 所示,智能消防应急灯使用了Cortex-M3 内核的STM32F103C8T6(U1)作为主控单片机,该单片机具有成本低、速度快、性价比高等优点[9]。智能消防应急灯使用DWM1000 模块(M1)实现UWB 通信,DWM1000 是DecaWave 公司生产的一款基于超宽带收发模块,该模块内部集成了部射频电路、电源管理和时钟电路以及天线,具有时间分辨率高、通信距离远、集成简单等优势。为了实现与云端的智能消防管理中心通信,本系统使用了有方科技的N21 模组(U6),该模组是一款超小封装的NB-IoT 工业级无线通讯模块,特点是超低功耗、广域覆盖、外围电路简单,支持多种网络协议[10],适合用于低速率低功耗的物联网通讯设备。为了防止因为姿态变化而错误显示指向信息,智能消防应急灯使用了超低功耗、高分辨率高的3 轴加速度计ADXL345(U3)测量其自身姿态[11],确保显示指向信息准确无误。智能消防应急灯使用了DS18B20 数字温度传感器(U4)测量现场温度,并使用了P10 标准LED 灯板作为显示部分(P1),改善了传统应急消防灯具只能指示固定逃离方向、提示信息量少的不足。
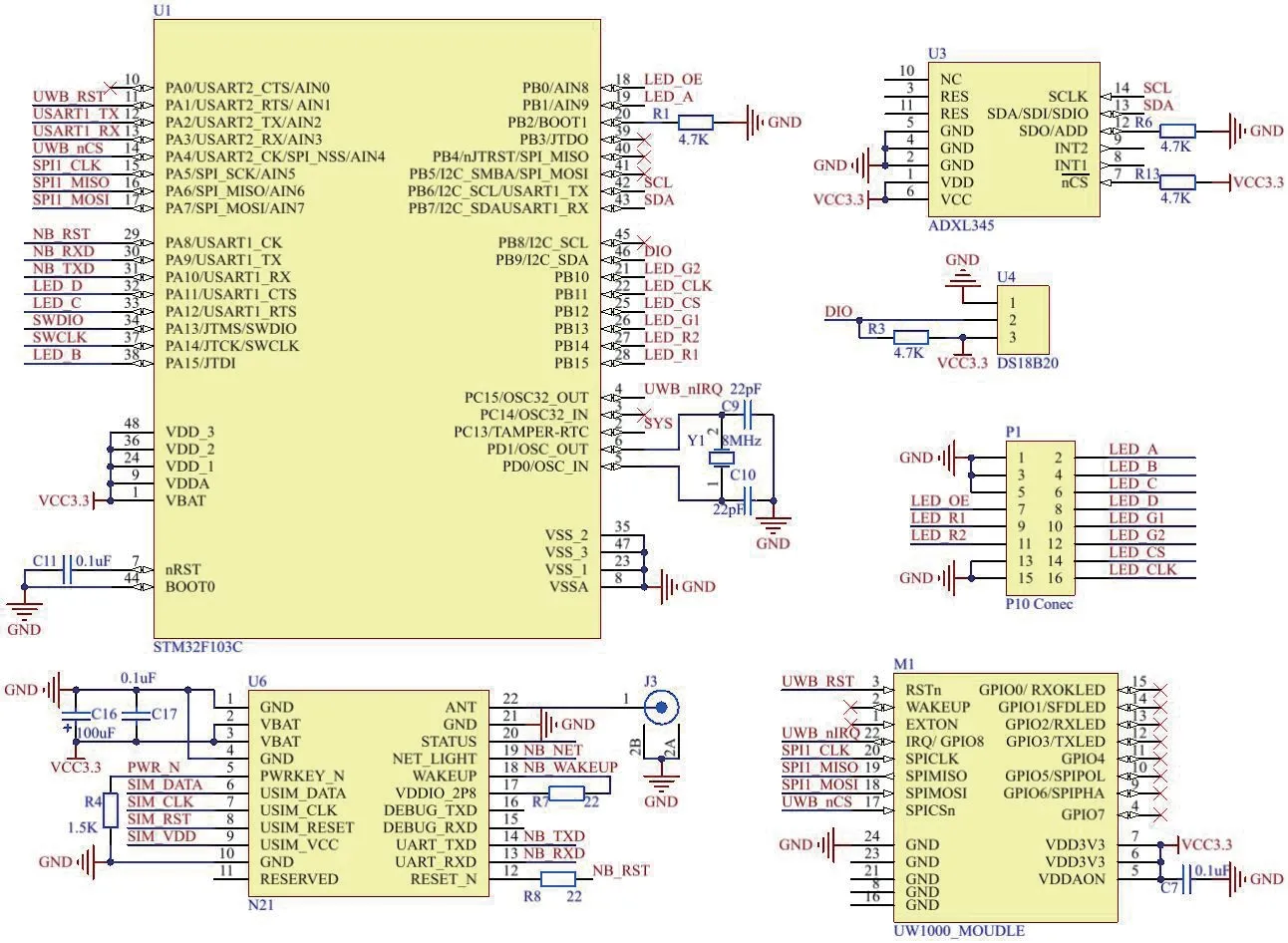
图2:智能消防应急灯主要电路
3.2 手持定位标签
手持定位标签是当发生火灾时受困人员携带在身上的设备,主要作用确定被困人员的位置、运动轨迹,主要电路如图3 所示。
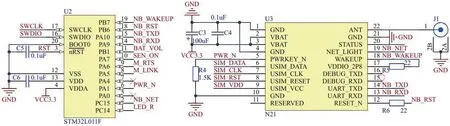
图3:手持标签主要电路
手持定位标签是使用电池供电的设备,所以使用了STM32L011F 作为主控单片机,该单片机是基于 Cortex-M0+ 内核的超低功耗 32 位 MCU,当使用 LDO 时该单片机的动态运行模式电流消耗仅有 76 µA/MHz,非常适合使用电池供电的设备使用[12]。UWB 通信使用的DWM1000 模块,不再赘述。
4 软件设计
本系统的软件部分主要由智能消防应急灯、智能消防中心服务器上运行的标签定位软件、导航指示控制软件构成。
4.1 UWB测距原理
被困人员的定位是通过对其于智能消防应急灯之间的距离实现的,本系统是通过双边双向测距法(double-sided two-way Ranging,DS-TWR)的方法实现的,测量过程如图4 所示。

图4:UWB 测距过程
手持标签在激活后首先发送Poll 数据包,并记录发送时间tTP。消防应急灯在接收到Poll 数据包后记录时间tRP,然后发送应答数据包Resp,记录发送时间tTR。手持标签在接收到消防应急灯的Resp 数据包时记录当前时间tRR,然后发送最后数据包Final,记录发送时间tTF。消防应急灯在接收到该数据包记录接收时间tRF,至此测距通信结束。根据记录的时间戳,计算得到四个时间差数据:

根据以上四个时间差,可以计算出来空中飞行时间[13]为:

根据无线电信号在空气中传输的特点可得到手持标签与智能消防应急灯之间的距离为:

其中c 为光速。
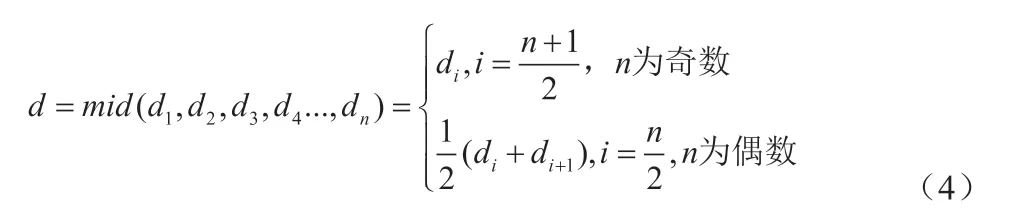
由于UWB 模块的接收带宽很大,所以容易受到周围电磁波的干扰而产生异常数据,本系统使用了中值滤波的方法去除异常值。中值滤波法作为一种非线性平滑技术,它的原理是采用排序统计理论降低信号中的噪声,该方面对信号中的孤立噪声有很好的降低效果[14]。计算公式如(4)所示:
程序流程图如图5 所示。

图5:中值滤波
4.2 被困人员定位
本系统使用三边测量法通过定位被困人员的手持定位标签实现来确定被困人员的位置。三边测量法是一种常用的定位算法,方法通过测量三角形的边长,再根据已知控制点的坐标、起始边的边长和坐标方位角,解算各三角形顶点水平位置,测量方法如图6 所示。

图6:被困人员定位原理
如图6 所示,图中智能消防应急灯的位置在施工时使用激光测距仪进行定位,其位置分别是(x1,y1)、(x2,y2)、(x3,y3) 、(x4,y4),智能消防应急灯作为定位的基站。设被困人员手持定位标签的位置为(x,y)。使用UWB 通信模块DWM1000 利用4.1 所示的方法测量标签与各基站的距离,可得:
将公式(5)中的第一个方程减去第二和第三个方程可得:

即:
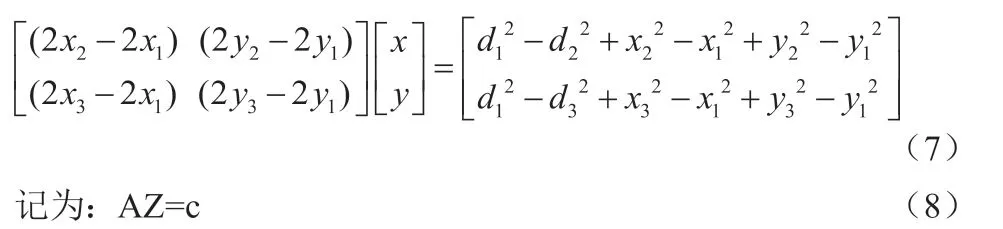
使用最小二乘法即可求解公式(8),结果为:

从而确定被困人员的位置。
4.3 导航路径计算
运行在智能消防中心服务器上的导航指示控制软件主要是根据受困人员的位置、传感器测量出来周围的温度等信息分析通道的阻塞情况,通过控制应急消防灯指示牌的指示方向引导受困人员脱困,其程序流程图如图7 所示。
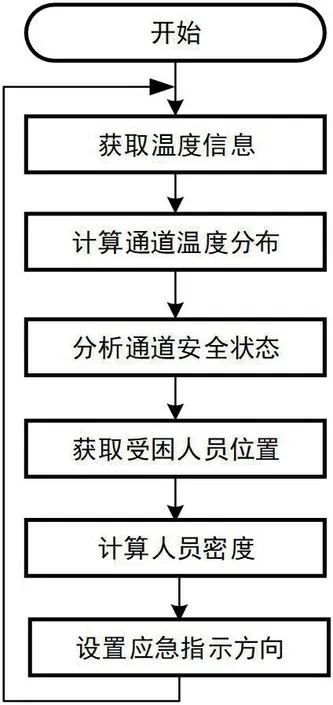
图7:导航路径计算
5 系统测试
为了测试本系统的性能,本文利用高等院校常见的丁字形过道进行了测试,测试区域如图8 所示。测试区域内共布置了7 个智能消防应急灯,其中智能消防应急灯1 设置为原点坐标;共设置了3个模拟着火点,用点燃的木柴模拟火灾,分别位于图中的A、B、C 三点,位置如图8 所示。

图8:测试图
5.1 定位测试
UWB 的定位测试是通过测试人员手持定位标签在区域内移动变换位置实现的,测试人员手持移动标签,双臂自然下垂,测试结果如图9 所示。

图9:定位精度
其中图9a 为水平方向的误差,图9b 为垂直方向的误差,由图可见随着距离变大,直接计算和中值滤波两种定位方面的定位误差均随着距离的增大而增大,尤其是当距离超过4 米时误差明显变大。同时也可以看出经过中值滤波后得到的定位误差明显小于直接计算方法,且误差的波动较小,可见中值滤波法是可以提高定位精度的。
5.2 导航测试
通过点燃不同模拟着火点,本文测试了系统的导航性能,结果如图10、图11 所示。

图10:单点着火测试

图11:多点着火测试
由图可见,无论是单点着火还是多点着火,本系统均比较好指示了逃离的方向,给受困人员提供了良好的应急逃生导航。
6 结论
本文针对建筑物火灾时室内被困人员难以顺利逃离的难点设计了应急导航定位系统,测试表明该系统使用的中值滤波法提高了室内定位的精度,硬件系统很好识别了室内的着火点,软件系统在单点着火、多点着火等常见火宅情况下给受困人员正确指示了逃生方向,起到了导航作用。
