基于工业机器人的智能仓储系统的设计
2021-11-01杨欢
杨 欢
(常州刘国钧高等职业技术学校,江苏 常州 213025)
0 引言
随着我国电商行业的繁荣,物流快递行业飞速发展,一举成为商业产业链底层重要的基础设施,跻身我国新经济的代表产业之一。截至2021年3月24日,我国快递业务量已突破200亿件,用时仅83d,预计2021年全国快递业务量将超过950亿件[1]。单功能大型的仓库已经无法满足当前需求,具备高度信息化、数字化、自动化的的智能仓储系统[2]才是未来的发展趋势。本文提出了一种基于工业机器人的智能仓储系统,可以自主完成货物的入库和出库操作,具有规模小、成本低、用途广、存取效率较高等特点。
1 仓储系统硬件系统设计
综合智能仓储系统的功能性要求,仓库系统的硬件主要包括工业机器人本体、货架、出库和入库传送带、二维码识别器、人机交互界面[3]。机器人本体用于执行货物的出库和入库作业;货架的作用在于存放货物,由于执行出入库作业的是工业机器人,本文基于工业机器人的工作空间特征,货架以工业机器人基坐标系坐标Z方向为轴环形布置,如此可以最大限度的利用工业机器人的工作空间;出入库传送带设置在仓库的出入口,作为仓库与外界进行货物交互的主要通道;二维码识别器安装在入库传送带入口端,在入库操作前完成货物种类的识别,并传送给机器人;人机交互界面设置在仓库外侧,出入库传送带旁边,主要用于显示仓库库存、仓库空位以及出库作业提交等功能。本文利用工业机器人离线仿真软件Robotstudio完成了仓储系统工作钻的硬件搭建,硬件具体布置示意图见图1所示。
2 仓储系统控制系统的设计
2.1 智能仓储的控制要求及系统设计
控制系统主要需要存储仓库每个货架上的状态,以及存放的货物信息,并通过人机交互界面,随时供相关人员查看。当有入库请求时,可以快速的找到空位,并控制机器人本体完成入库作业。当有出库请求时,可以快速的寻找到目标货物的存放位置,并控制机器人本体完成货物的出库作业。控制系统结构如图2所示。

图1 硬件布置示意图

图2 控制系统结构图
2.2 智能仓储的功能实现
控制系统需要存储货架的当前状态,是否已经存放货物,同时还需要存储货物的种类信息。这两类信息需要的数据类型不一致。通过创建结构体shelf_info即可解决。创建的结构体由一个bool型变量命名为“flag”和一个string型变量命名为“name”组成。利用结构体中的布尔量“flag”存储货架的当前是否存储货物,利用其中变量“name”存储当前货架上存储的货物名称。如此,系统在进行入库时的空位检索只需要判断每个货架的“flag”是否为true即可判断空位情况,出库时的货物检索只需要对目标货物名称和每个货架的“name”进行对比即可。同时,如果后期需要存储货物的更多信息,只需要扩展结构体中的数据即可。
出入库作业时间相对较长,而出库和入库请求时间相对较短。为了提高仓储系统出入库的效率,利用外部信号中断接收出入库请求。如此就可以在机器人执行出入库作业过程中接收新的出入库请求。为了能够让机器人按照出入库请求的先后顺序依次完成,建立队列。所有的出入库请求可以按照请求的先后顺序依次记录在数组queue_demand{99}里面,当有新的的出入库请求发出之后,机器人将其依次存入数组queue_demand{99},机器人每次提取的出入库请求数据为最前数据queue_demand{1},然后将该数组后续的内容依次向前移动一位。系统控制流程如图3所示。
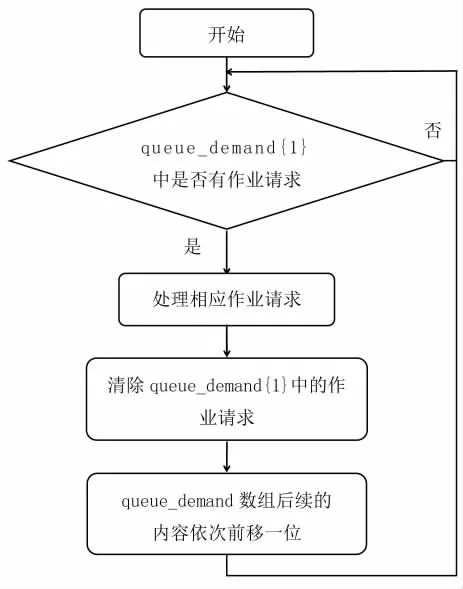
图3 系统控制流程图
2.3 人机交互界面设计
人机界面是智能仓储和外界管理者之间进行交互的媒介[4],主要需要实现的功能有:对外显示仓储的当前状态,包括货架的空位情况、货物的存储情况以及是否需要维护信息;对内需要实现出入库请求的输入,然后通知机器人控制系统以进行后续的操作。
人机界面可以采用触摸屏作为实施硬件,同时也可以做成软件应用安装在移动终端,方便远程监管和操作。本文选择维纶触摸屏作为终端,主要操作界面如图4所示。

图4 主要人机界面设计
3 结语
本文提出的基于工业机器人的智能仓储系统,采用环形货仓设计,充分利用了工业机器人的工作空间,提高了货物存储密度。无需专人看护,由机器人实现出入库作业的执行操作,同时利用结构体存储对应货架上的货物信息,提高了出入库的效率。