货车移动遮断影响下的小客车驾驶行为识别
2021-10-30戢晓峰卢梦媛覃文文
戢晓峰,卢梦媛,覃文文
(昆明理工大学,a.交通工程学院;b.云南省现代物流工程研究中心,昆明650500)
0 引言
山区双车道公路弯多坡陡、行车条件复杂[1],货车混入交通流后对相邻后方小客车驾驶人造成视觉障碍、心理压力和降速等影响,由此引发的小客车换道、超车等危险驾驶行为易导致交通事故。相关统计表明,货车与小客车发生碰撞事故的比例约占所有致命货车事故的60%,其中超过80%的事故与小客车驾驶人有关,小客车驾驶人死亡率高达83%[2]。因此,分析与识别小客车在货车视线遮断、速度压制影响下的驾驶行为,对降低小客车在山区双车道公路的驾驶风险具有重要意义。
针对货车对交通影响,GAZIS 等[3]分析慢行车辆对道路通行能力的影响,首次提出“移动瓶颈”的概念。MORIDPOUR 等[4]调查分析重型货车附近的交通特征,发现重型货车前、后车头间距较大,且当交通密度和重型货车比例较大时小客车换道频率更高。近年来,有学者关注到货车与小客车交互作用对交通安全的影响,主要集中于高速公路,针对山区双车道公路货车对小客车驾驶行为影响的研究较为少见。PEETA 等[5]将货车与小客车的交互作用视为小客车的驾驶行为,构建高速公路路段交通流模拟器分析小客车驾驶行为决策。HYUN等[6]利用定点检测器采集交通数据分析涉及货车的车辆交互作用与碰撞风险的关系,发现货车与其他车辆的相互作用与碰撞可能性显著相关,当小客车跟在货车后面行驶时,发生碰撞的可能性较大。此外,在驾驶行为识别方面,常用支持向量机(SVM)[7]、随机森林(BF)[8]、轻量梯度提升机(LGBM)[9]等机器学习方法。由于上述方法需使用行车参数的统计特征作为模型输入变量,因此,货车移动遮断下小客车的驾驶行为关键特征有待进一步提取。
综上,针对山区双车道公路货车移动遮断对小客车驾驶行为影响研究的不足,本文基于无人机视频数据,通过提取货车移动遮断下小客车驾驶行为特征参数,构建基于SVM 的小客车驾驶行为识别模型。
1 货车移动遮断下小客车驾驶行为分析
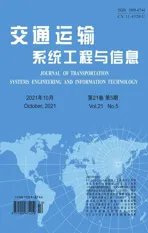
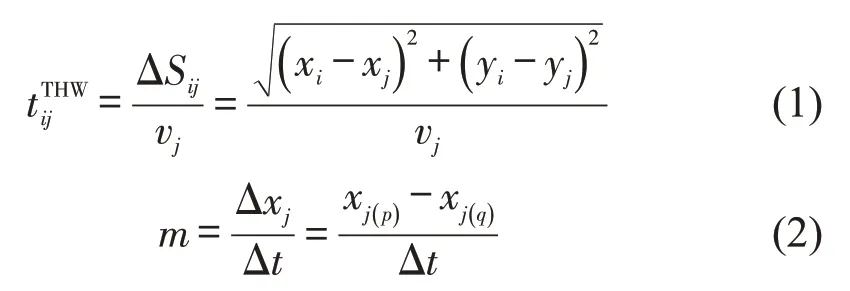
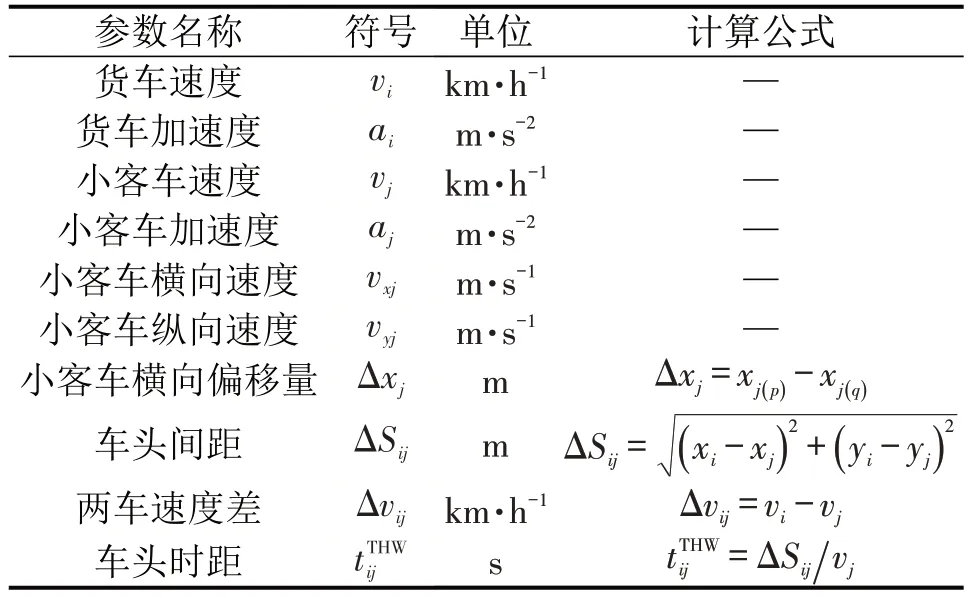
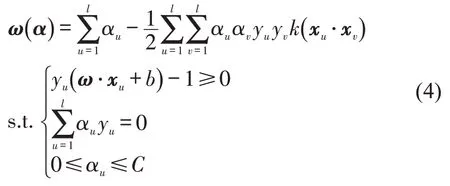
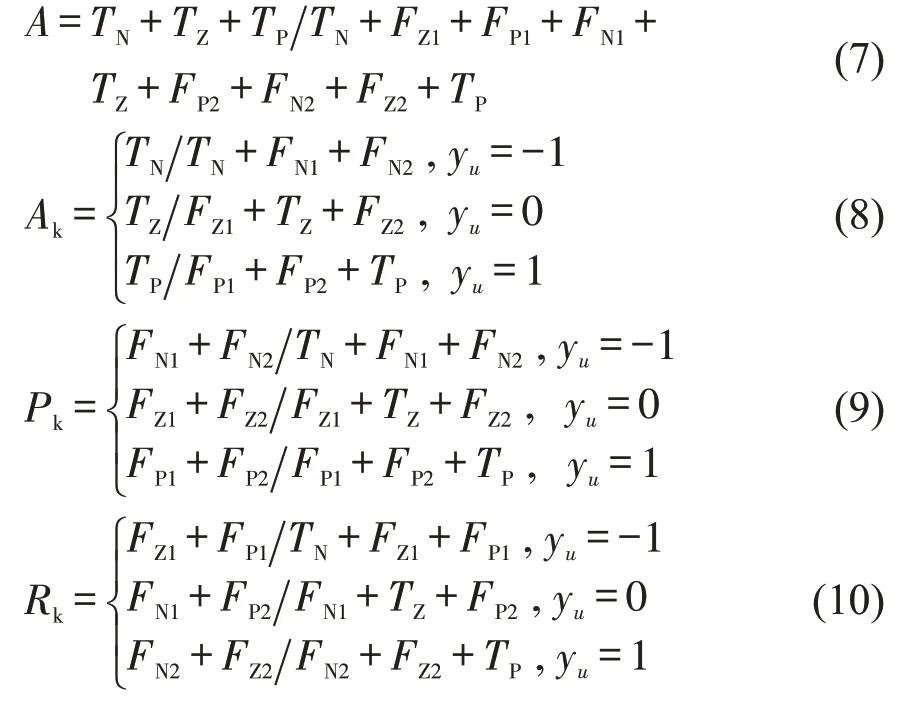
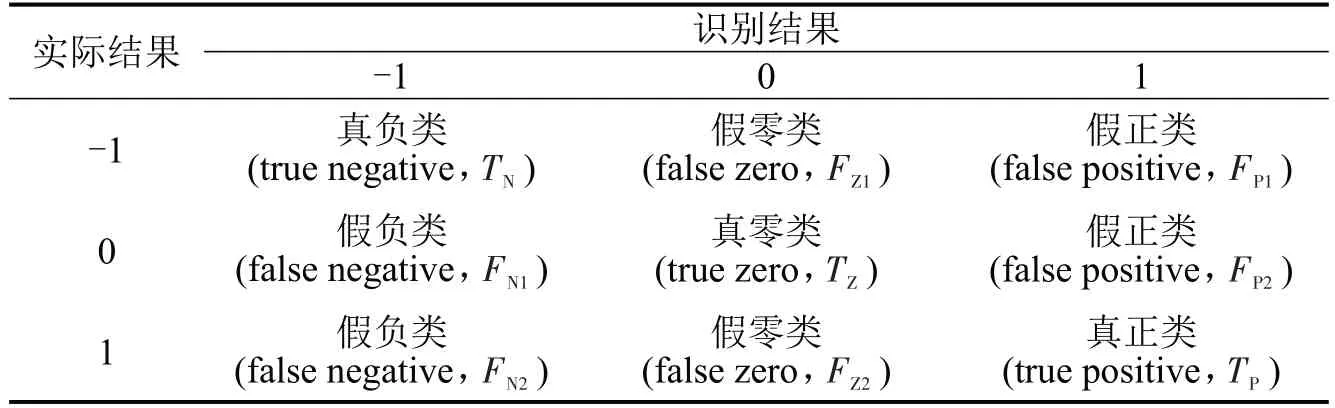
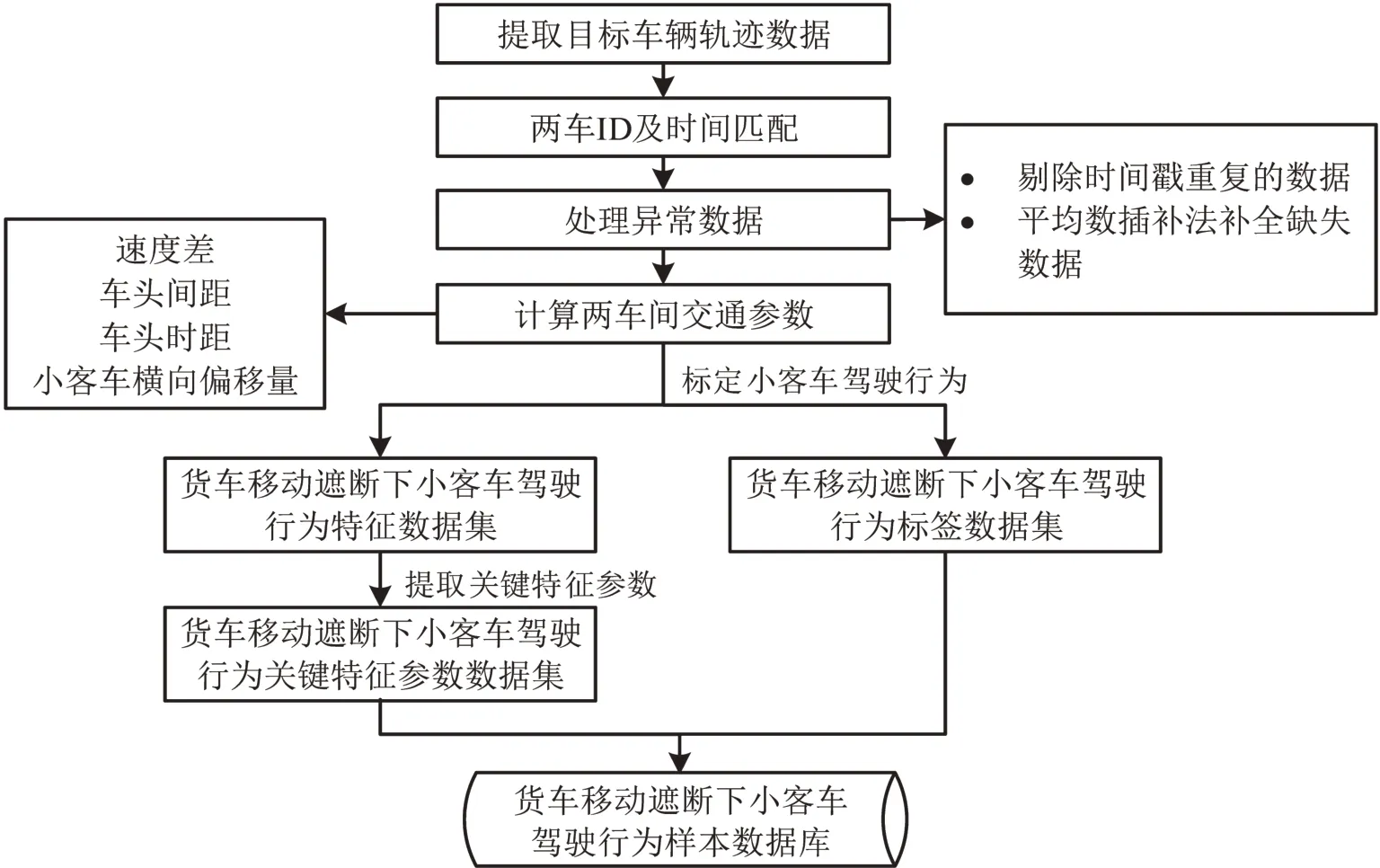
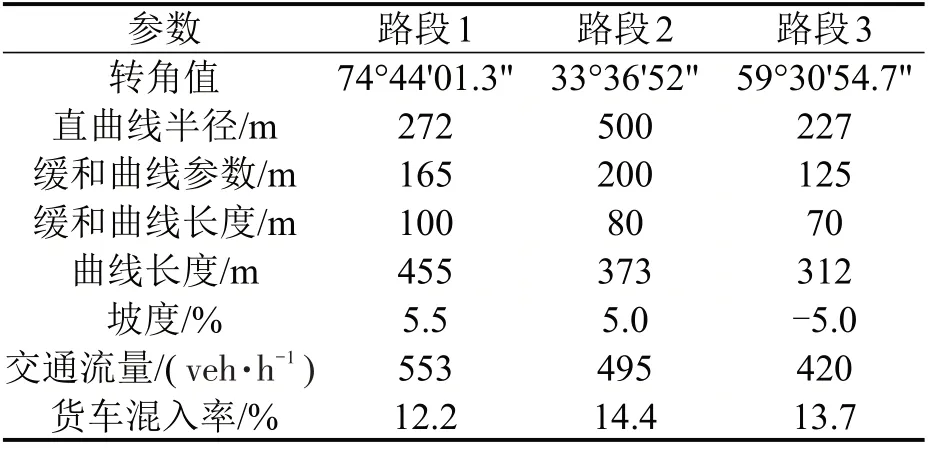
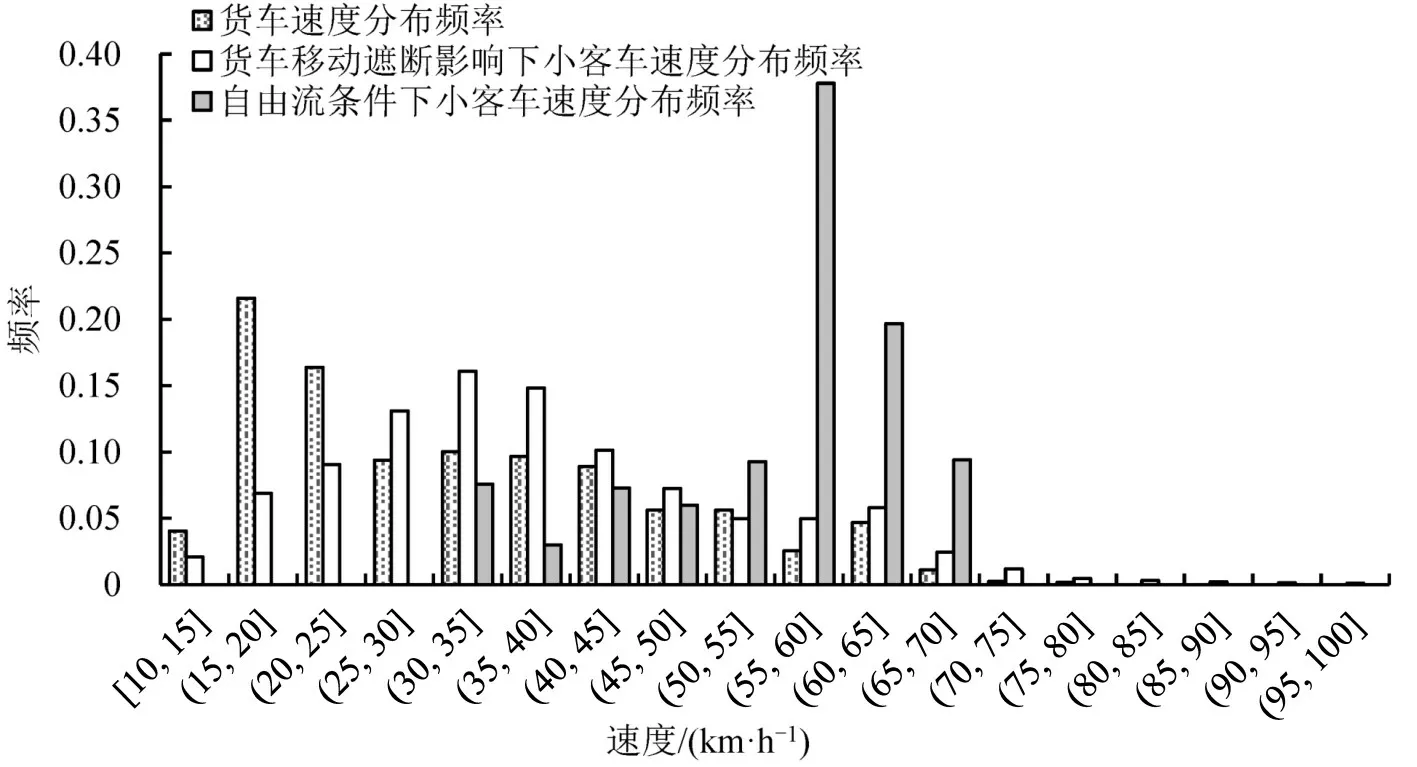
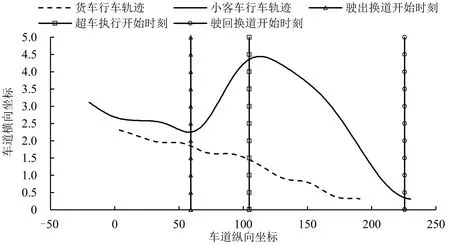
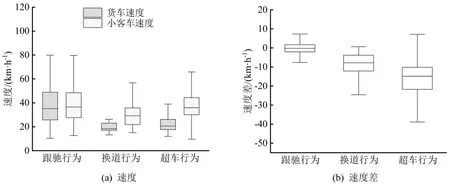
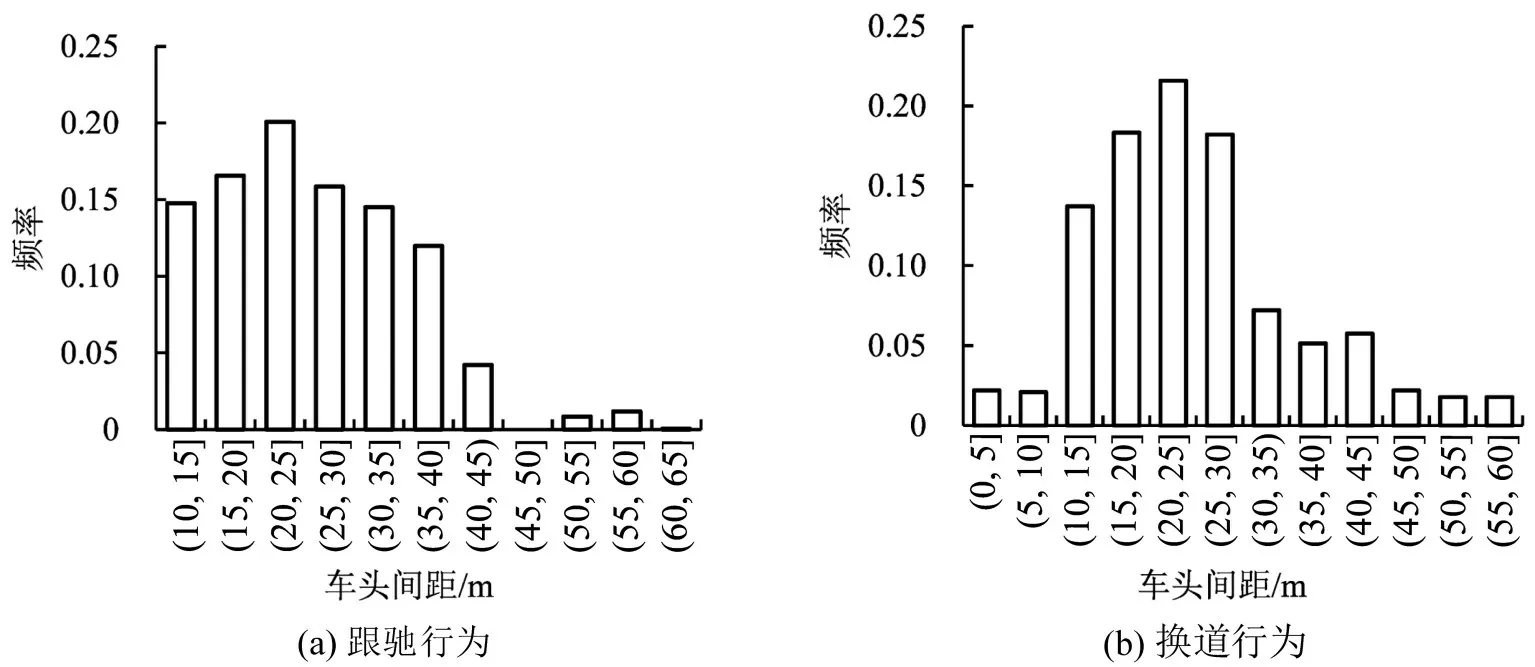
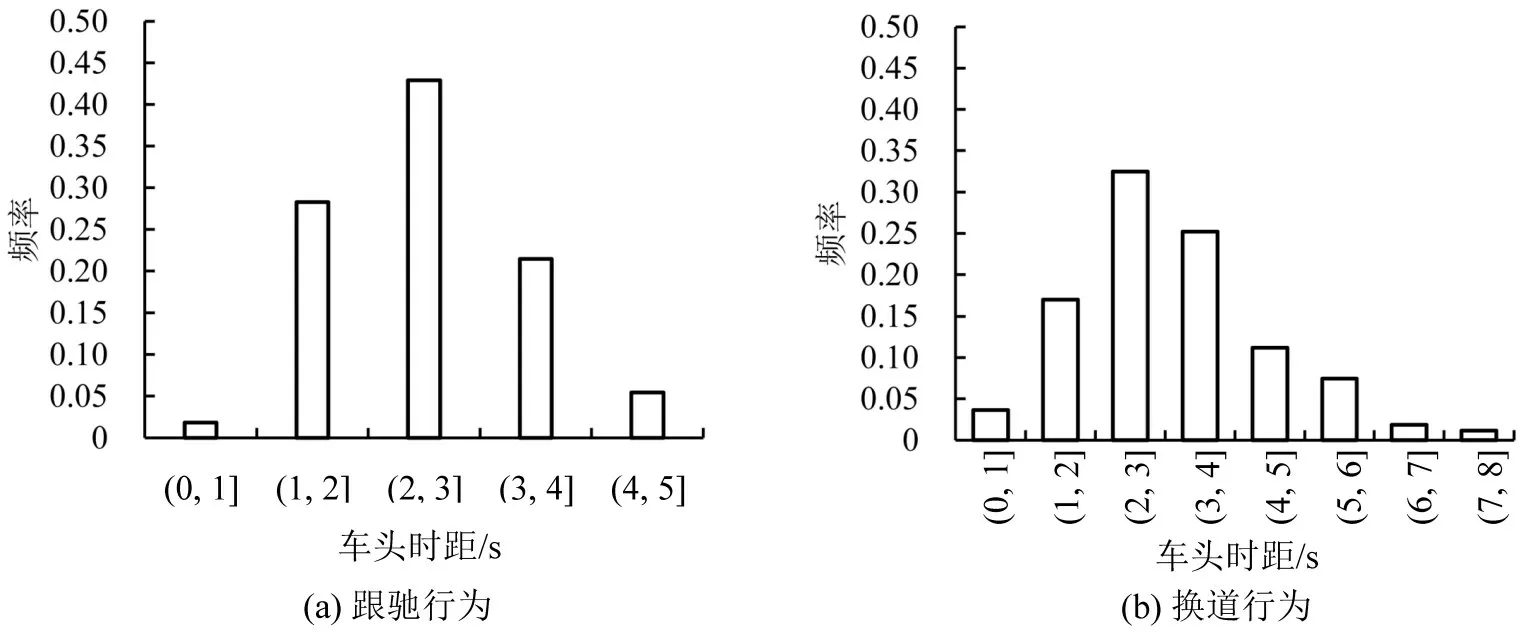
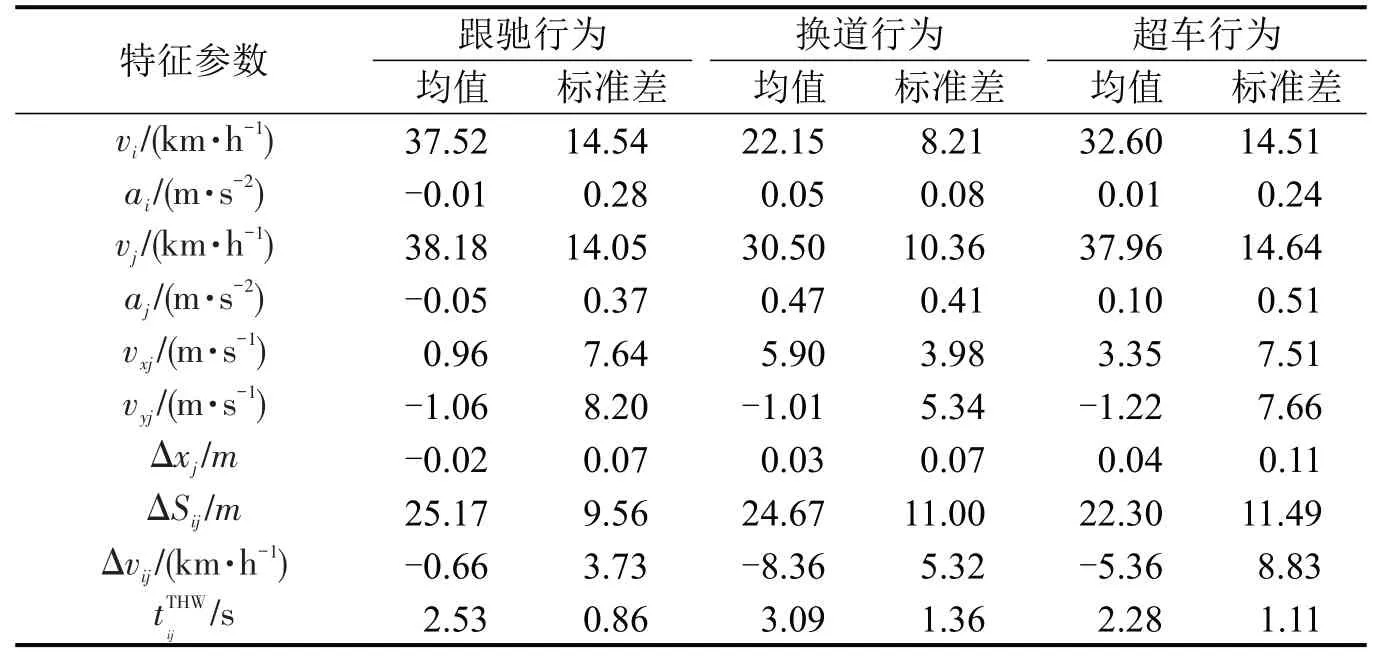
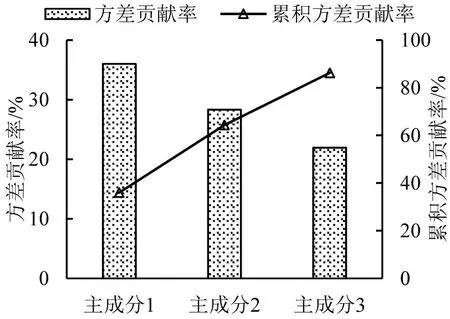
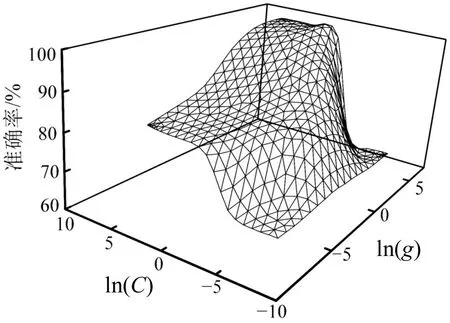
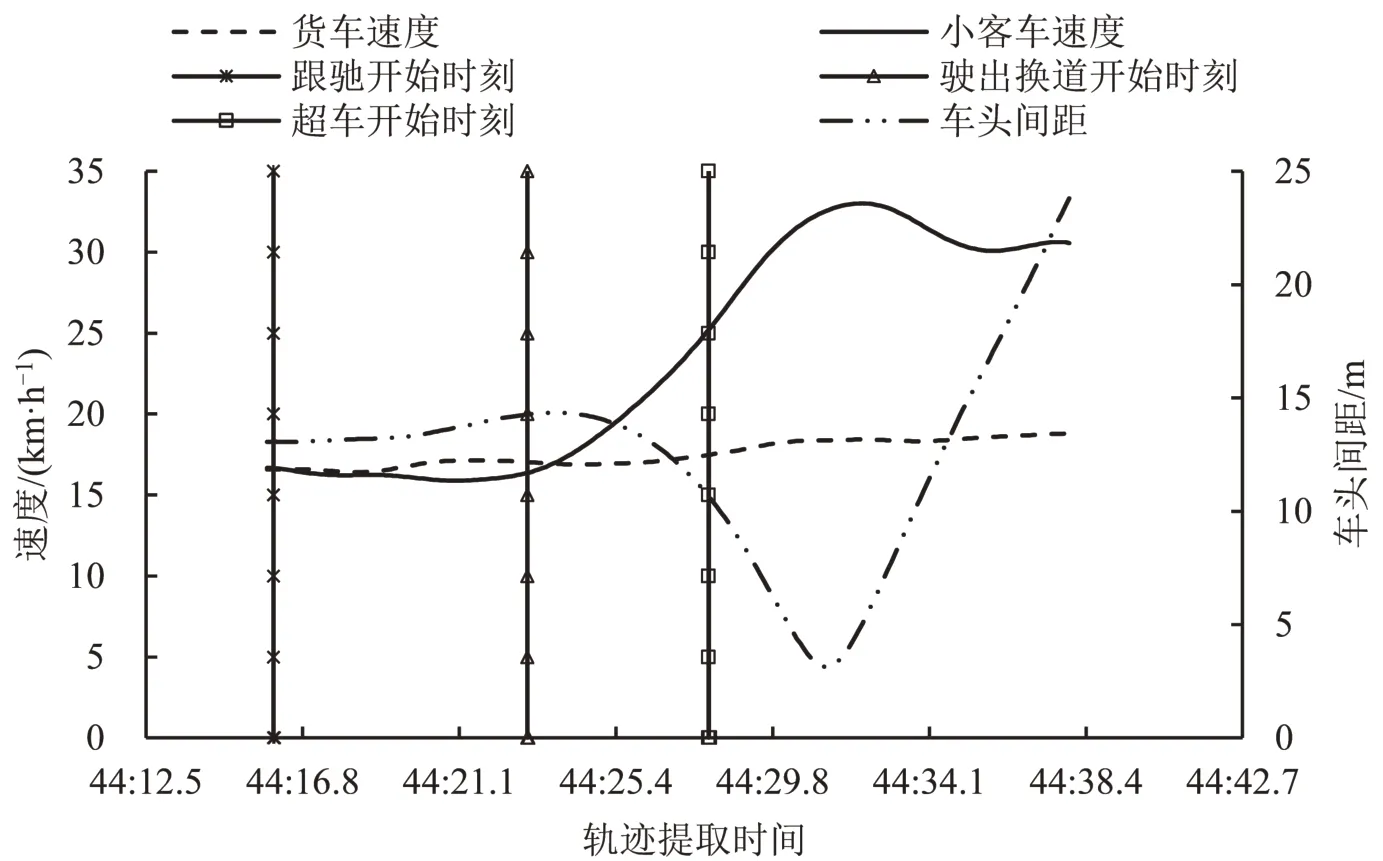
假设货车i 以速度vi、小客车j 以速度vj行驶在山区双车道公路中,其中,vj (1)跟驰行为。当行驶路段不具备超车条件且小客车驾驶人视线欠佳时,小客车以速度vj、跟驰距离L 跟驰货车行驶,称为“货车移动遮断下的小客车跟驰行为”,如图1(a)所示。 (2)换道行为。当行驶路段具备超车条件时,小客车驾驶人以速度vj>vi)加速行驶,跨越车道线驶向对向车道,称为“货车移动遮断下的小客车换道行为”,如图1(b)所示。 (3) 超车行为。小客车换道后在对向车道上超越货车,待具备条件后驶回原车道,完成超车,称为“货车移动遮断下的小客车超车行为”,如图1(c)所示。 图1 货车移动遮断下小客车驾驶行为场景Fig.1 Scene of passenger car driver behavior under truck movement interruption 首先,根据无人机拍摄覆盖范围内小客车是否产生换道动作初步判定其驾驶行为;其次,以货车i与小客车j 的车头时距(Time to Headway)小于5 s 作为跟驰行为的判别阈值;同时,在精度为0.1 的条件下,将小客车横向位置曲线斜率m 倾向于0作为换道时刻T 的初始判断条件,采用m 是否持续变化作为判断换道行为起点、终点的依据,将m 持续大于0(或小于0)的起点定义为换道行为的开始时刻T1,持续变化的结束点为换道行为结束时刻T2;采用相同判别方法确定小客车超车完成驶回原车道结束时刻T3,即超车行为结束时刻;最后,基于判别条件标定货车移动遮断下小客车驾驶行为类别。车头时距、小客车横向位置曲线斜率公式为 式中:ΔSij为货车i 与小客车j 的车头间距;xi、xj分别为货车、小客车垂直于车道方向的坐标位置;yi、yj分别为货车、小客车沿车道方向的坐标位置;m 为小客车横向轨迹曲线斜率;Δxj为小客车横向偏移量,其中,xj(p)、xj(q)分别为p、q 时刻小客车垂直于车道方向的坐标位置,p=q+0.1;Δt 为横向偏移所用时间,本文取值为0.1 s。标定流程如图2所示。 图2 货车移动遮断下小客车驾驶行为标定流程Fig.2 Flow chart of passenger car driver behavior calibration under truck movement interruption 基于文献[7],结合货车与小客车在山区双车道公路的交互特性,选取速度、加速度、横向偏移量、车头间距、速度差、车头时距等指标构建货车移动遮断下的小客车驾驶行为特征参数集,如表1 所示。采用主成分分析法对特征数据进行降维,得到的主成分公因子为小客车驾驶行为关键特征参数,即识别模型输入变量。 表1 货车移动遮断下小客车驾驶行为特征参数Table 1 Characterization parameters of passenger car driver behavior under truck movement interruption SVM小样本学习能力强、模型泛化性能好,不易陷入局部最优。本文为非线性分类问题,SVM通过核函数将样本数据映射到高维空间,使其变为线性可分问题。货车移动遮断下小客车驾驶行为样本数据集xu∈Rn,yu∈{-1,0 ,1} ,u=1,2,…,l ,Rn为n 维实数空间。假设存在超平面ωT⋅x+b=0 能够正确分类所有样本,所有样本数据需满足 式中:xu为小客车驾驶行为关键特征参数;yu为小客车驾驶行为类别;l 为小客车驾驶行为样本数据数量,ω=(ω1,ω2,…,ωd)为法向量;b 为偏置。 根据文献[10]推导,获得寻优目标函数式,即 式 中:α=(α1,α2,…,αl)为Lagrange 乘子向量,αu、αv为Lagrange 乘 子;常数C为惩罚因子;k(xu,xv)为径向基函数。 利用Python 构建基于SVM 的识别模型,识别流程如下: Step 1 按照4∶1 的比例将样本数据划分为训练、测试样本。 Step 2 采用网格搜索法对径向基函数k(xu,xv)的参数C、g 进行寻优,并通过k 折交叉验证评估模型性能,g 为核参数。 Step 3 采用序列最小优化方法(SMO)求解最优分类决策函数,获得基于SVM的分类模型。 Step 4 预测测试样本,并基于识别指标评估模型的识别效果。 本文可预见的识别结果如表2 所示。采用识别准确率A、分类准确率Ak、误报率Pk和漏报率Rk评价模型识别效果,计算公式为 表2 3分类问题识别结果Table 2 Recognition results of three classification problem 以云南省典型山区双车道公路—元双公路为例,选取货车混入率较高的3 个路段作为研究路段,基本信息如表3所示。采用无人机拍摄方式采集交通视频数据,并利用George2.1 视频处理软件提取目标车辆的轨迹数据。轨迹的提取频率为10 Hz,地面点坐标的精度误差控制在±0.05 m 之内。通过处理轨迹数据,构建货车移动遮断下小客车驾驶行为样本数据库,处理流程如图3所示。 图3 轨迹数据处理流程Fig.3 Flow chart of trajectory data processing 表3 研究路段基本信息Table 3 Basic information of research section 由图4可知,元双公路小客车在自由流条件下的行车速度为55~65 km·h-1,而在货车移动遮断下的行车速度仅为25~45 km·h-1。山区双车道货车移动遮断导致小客车行车速度约降低20~30 km·h-1,比相同交通流条件高速公路中因货车移动瓶颈影响而导致的降速约高15~20 km·h-1。 图4 元双公路货车与小客车速度频率分布Fig.4 Distribution of trucks'velocity and passenger cars'velocity frequency on Yuan Shuang Highway 分析货车移动遮断下小客车与货车的行车轨迹发现,不同驾驶行为下的小客车横向位置曲线具有显著差异性。跟驰货车行驶时,两车行车轨迹高度相似,只是在时间、空间上有延迟;驶出换道时,小客车行车轨迹出现拐点,横向位置曲线斜率倾向于0,而后横向位置快速变化,m 持续大于0;超车执行时,再次出现拐点后横向位置逐渐向货车横向位置靠近,m 持续小于0,第3个拐点出现后小客车超车结束,如图5所示。 图5 货车移动遮断下货车与小客车行车轨迹图Fig.5 Figure of truck and passenger car travel track under truck movement interruption 根据小客车驾驶行为特征数据描述性统计结果,分析货车移动遮断下小客车3种不同驾驶行为的特征参数。 (1)速度、速度差 由表4、图6可知,同跟驰、超车情况相比,小客车换道时平均速度最小(30.50 km·h-1),与货车间的速度差值最大(-8.36 km·h-1),说明小客车在换道时适当减速以探查超车交通条件,确保安全超车,体现了小客车驾驶人在山区双车道公路换道行驶的谨慎性。 图6 货车与小客车速度分布Fig. 6 Distribution of velocity for trucks and passenger cars (2)车头间距 由表4、图7 可知,小客车跟驰、换道时两车平均车头间距均为25 m,但车头间距的频率分布具有差异性。跟驰时两车车头间距分布于10~40 m,以5 m为分组间隔,频率分布较为均匀;换道时车头间距集中分布于15~30 m,频率分布较为集中。 图7 小客车跟驰、换道行为车头间距分布Fig.7 Distribution of space headway for passenger cars car-following behavior and lane-change behavior (3)车头时距 由表4、图8可知,跟驰时车头时距集中分布于1.0~3.0 s,换道时车头时距集中分布于2.0~4.0 s;小客车在山区双车道公路中跟驰货车行驶的平均车头时距为2.53 s,小于《公路工程技术标准》中规定的最小安全车头时距。 图8 小客车跟驰、换道行为车头时距分布Fig.8 Distribution of headway for passenger cars car-following behavior and lane-change behavior 表4 小客车驾驶行为特征参数描述性统计Table 4 Descriptive statistics of passenger car driver behavior characteristic parameters 对样本数据进行独立样本Kruskal Wallis 检验,结果显示所有特征参数在3 种驾驶行为中的P值均小于0.05,说明所选取的特征参数均具有显著差异,适合作为识别模型的特征参数。将归一化处理的样本数据进行主成分分析,确定vi、vj、vxj、为关键特征参数,得到3个主成分公因子即为识别模型的输入变量,其累计贡献率为86.24%,如图9所示。 图9 方差贡献率Fig.9 Variance contribution rate 基于网格搜索算法和10 折交叉验证,寻找核函数的最优参数C 和g ,寻优过程如图10 所示。最终确定最优参数组合为C=300,g=150,此时交叉验证率达99.04%。 图10 核函数参数寻优Fig.10 Kernel function parameter optimization 用训练得到的识别模型对测试样本进行识别,对比识别结果与实际结果,利用式(7)~式(10)计算得到模型识别评价指标。结果显示:模型识别准确率达98.41%,漏报率小于7.60%,误报率小于4.00%,识别结果如表5所示。 表5 货车移动遮断下小客车驾驶行为识别结果Table 5 Recognition results of passenger car driver behavior recognition under truck movement interruption 从测试样本中随机挑选1组数据,识别模型预测的小客车驾驶行为如图11所示。小客车跟驰货车行驶时,两车速度基本一致,车头间距平稳波动;换道超车时,小客车速度迅速提升,车头间距迅速减小,直到两车齐头并排行驶时,车头间距达到最低点,间距大小与车道宽度相近,此后两车车头间距又急剧扩大。由图11 可知,基于SVM 识别的小客车驾驶行为与样本数据中驾驶行为的标定结果基本吻合,说明基于SVM 的货车移动遮断下小客车驾驶行为识别模型识别效果较好。 图11 货车与小客车速度及两车车头间距Fig.11 Velocity of truck and passenger car and space headway between two vehicles (1)相比高速公路货车移动瓶颈,山区双车道货车移动遮断对小客车正常行车速度的影响更大。在相同交通流条件下,高速公路货车移动瓶颈导致小客车平均车速约降低5~10 km·h-1,而在山区双车道货车移动遮断影响下小客车行车速度约降低20~30 km·h-1。 (2)山区双车道货车移动遮断在一定程度上增加了小客车的驾驶风险。小客车在换道时与货车的平均速度差绝对值比超车时大3.00 km·h-1,体现了小客车在货车移动遮断影响下的谨慎型换道驾驶行为;同时,小客车在山区双车道公路中跟驰货车行驶的平均车头时距为2.53 s,小于相关规范中规定的最小安全值,过小的车头时距导致小客车跟驰行车风险增大。 (3) 以货车速度、小客车速度、小客车横向速度、车头间距、车头时距和小客车横向偏移量为关键特征参数的支持向量机识别模型,对山区双车道公路货车移动遮断影响下小客车驾驶行为的识别准确率达98.41%。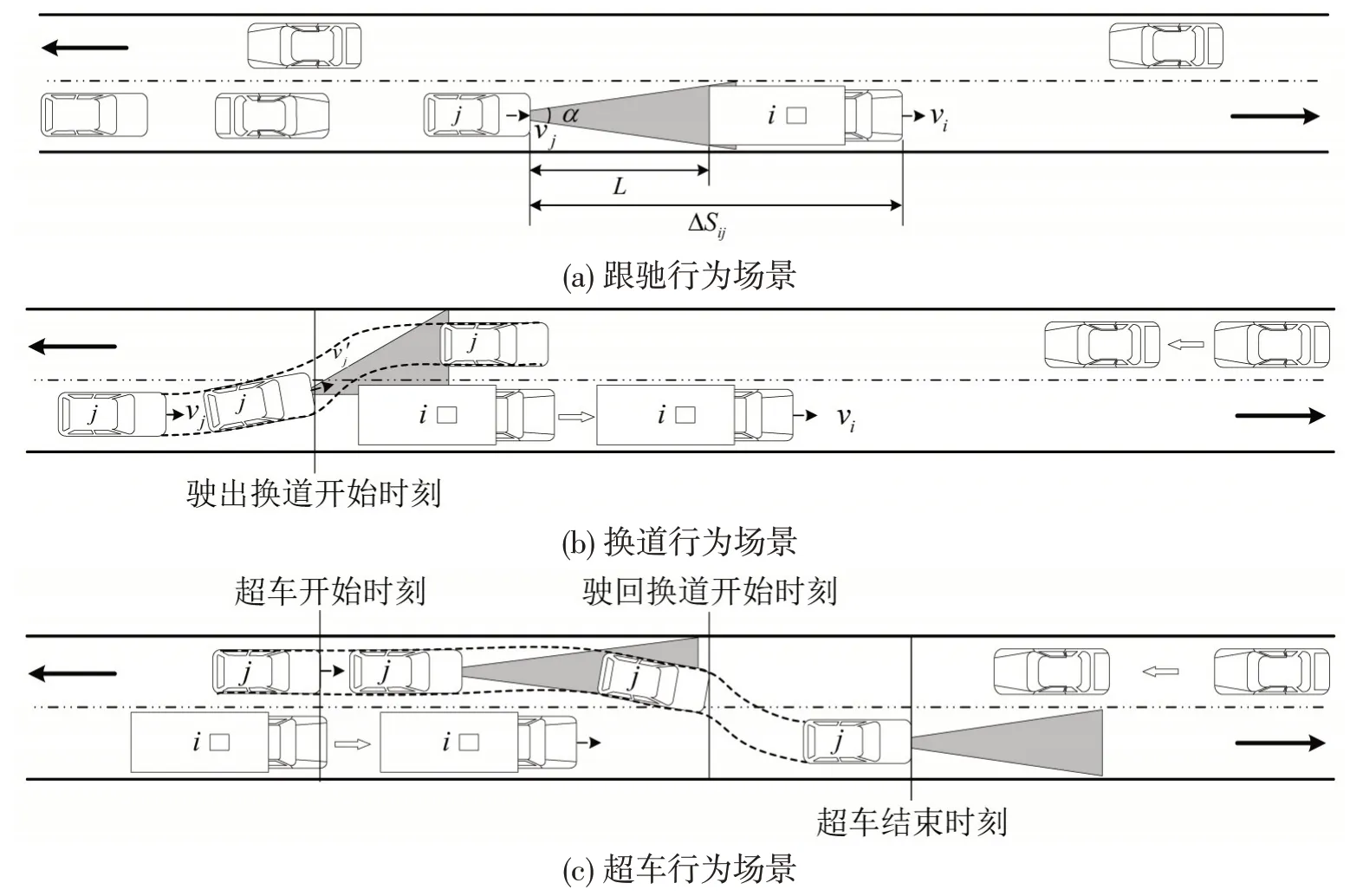
2 基于支持向量机的驾驶行为识别模型
2.1 小客车驾驶行为标定
2.2 小客车驾驶行为关键特征参数提取
2.3 基于支持向量机的识别模型构建



2.4 模型识别效果评价
3 实例分析
3.1 数据采集与处理
3.2 小客车驾驶行为特征分析
3.3 模型识别结果与分析

4 结论