基于轨迹数据的车辆跟驰行为分析与建模综述
2021-10-30田钧方朱陈强贾宁马寿峰
田钧方,朱陈强,贾宁,马寿峰
(天津大学,管理与经济学部,天津300072)
0 引言
交通流理论是研究在一定环境下交通流随时间和空间变化规律的模型和方法体系,以分析的方法阐述交通现象及其机理,从而在交通规划、设计和管理中达到协调和提高各种交通设施的使用效果[1-3]。作为参与交通的主要因素,车辆自身及其之间相互作用的研究可以揭示车辆之间的微观互动以及由此产生的宏观交通流现象。为此,研究人员致力于通过收集数据分析驾驶员的行为[4-5]。根据数据采集环境,交通流数据可以分为自然场景数据和实验场景数据。自然场景数据是指在真实自然环境中采集的数据;实验场景数据是指研究者通过构建实验场景、组织交通实验采集的数据。
对于自然场景数据的采集,最初是通过人工方式进行的,例如,人工记录某段时间在某条道路的某个截面通过的车辆数及连续两辆车之间的时间间隔等。随着技术的发展,道路检测器逐渐发展为数据采集的重要方式之一。根据检测器的安装方式,可以分为埋设在路面下的嵌入式检测器和安装在支架、路侧稍高立柱上的非嵌入式检测器[6]。嵌入式检测器包括:环形线圈检测器、气压式检测器、压电式检测器等。非嵌入式检测器包括利用红外技术、雷达技术的检测器。近年来,视频采集质量的提高和图像处理技术的进步使研究人员可以采集车辆行驶轨迹数据[7-11],极大地促进了相关交通流理论研究,其中最著名的是NGSIM数据集。
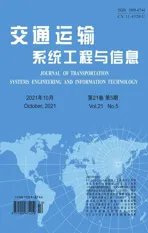
NGSIM 数据集[12]是由美国联邦公路管理局、微观交通仿真研究学者及商业交通仿真软件开发商组成的项目组提供的一个开源的自然场景轨迹数据集。NGSIM 数据集主要包括:I80、US101、Lank、Peach 这4 个路段的车辆轨迹数据。以US101 为例,数据采集于2005年6月15日上午7:50-8:35,美国加利福尼亚州洛杉矶兰克尔辛大道(Lankershim Avenue)附近,车道示意如图1(a)所示。
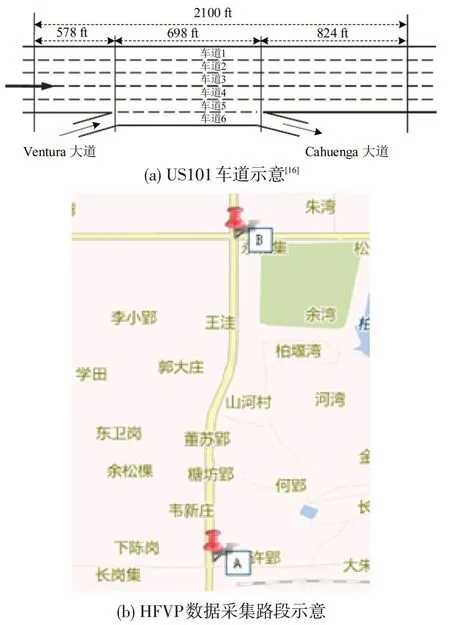
图1 US101、HFVP采集路段示意图Fig.1 Road section schematic for collecting US101 data and HFVP data
此外,随着无人驾驶飞行器(UAV)技术的发展,研究人员开始尝试通过UAV 收集车辆轨迹[13-15]。
由于现实道路条件过于复杂,不利于厘清交通流运行的行为机制,学者们通过组织交通流实验,采集相关数据,包括基于真车实验的数据采集和基于模拟驾驶器的数据采集。
基于真车实验的数据采集通常指研究者在真实道路下通过组织真车交通流实验采集数据的方式。参与者按照实验组织人员的要求开展实验。实验常通过车载全球定位设备采集数据,包括车辆的时间、位置等行驶信息。近年来,国内学者姜锐等在合肥采集的车队轨迹数据(HeFei Vehicle Platoon Data,HFVP数据)逐渐引起广泛关注[17-24]。
HFVP 数据是真实道路上采集的真实车队行驶数据。数据是在合肥一段3.2 km 的城市道路上进行的25辆车车队行驶实验中采集得到的[25-26],采集路段如图1(b)所示,图中A、B点为采集路段的起终点。实验过程中仅控制车队头车的运行速度,以模拟由于慢车导致的移动瓶颈,车队中其他车辆跟随其前车行驶,并不允许换道。在实验过程中,其他车道有非实验车辆行驶,由于道路较宽(双向6车道)且实验当天交通流量较低,在实验中途,并未出现非实验车辆插入的情况。所有参与实验的车辆都安装了高精度的全球定位系统设备,每隔0.1 s记录1次车辆的时间、位置和速度等信息。
对于难以通过真车实验采集的情况(例如,危险交通环境等),驾驶模拟器为研究者提供了一种安全有效的收集方法。驾驶模拟器利用虚拟现实技术营造一个看似真实的虚拟驾驶环境,研究人员可以根据研究目的设计各种实验场景。实验参与者通过自身视觉、听觉、触觉等直观、自然地感知虚拟环境,参与者对驾驶器的操作通过传感装置输入计算机并被处理成相应实时响应,使参与者产生交互式的沉浸感。同时,模拟驾驶器可以准确记录驾驶员对车辆的操作,包括:横、纵向位置,方向盘转角等信息。通过佩戴传感器等生理检测设备,可以记录参与者眼动、脑电、皮电等生理指标[27]。
车辆行驶轨迹数据的收集与分析极大地推动了交通流理论研究与应用研究。理论方面,轨迹数据分析不仅加深了对交通振荡、回滞等关键现象的认识,而且加深了研究者对驾驶行为的理解,为缓解交通拥挤提供科学依据。应用方面,轨迹数据提供的车辆与其周围车辆的详细信息,在交通管理方面具有广泛应用[28-34]。例如,ZHAO 等[28]提出利用车辆轨迹数据描述碰撞风险指标,评估碰撞风险并进行风险预警;ZHANG 等[34]利用轨迹数据计算高峰与非高峰时段、拥堵与非拥堵情况下的车辆排放,发现不同污染物排放率的规律,为排放减少提供了助力。
为进一步促进车辆轨迹数据的采集与应用,总结现阶段的关键研究成果,推动相关交通流理论的发展,本文重点介绍近几年围绕车辆轨迹数据展开的相关研究成果。虽然已有一些交通流理论或模型的综述[35-38],但对本文关注的研究成果介绍不够深入,缺乏将交通流现象、跟驰行为和仿真建模相互联系的研究综述。基于此,本文介绍以交通振荡、交通回滞为代表的交通流关键实测现象研究,包括不对称跟驰行为、稳定跟驰行为的存在性、跟驰行为记忆效应、随机性、任务难度、异质性在内的跟驰行为分析研究,以及与之对应的仿真模型,最后讨论研究现状及未来展望。
1 交通流关键实测现象
1.1 交通振荡
交通振荡指车辆在高速公路上行驶时,速度不稳定,波动较大,呈现减速与加速循环的现象[39]。交通振荡常常会演化成“时走时停”波,即交通堵塞。ZHENG 等[40]通过小波变换,分析了53 个实测振荡轨迹数据,认为车辆换道和车辆跟驰都可能产生交通振荡,且无论振荡的触发条件是什么,振荡传播的特征(传播速度、持续时间和振幅)都是相似的。LAVAL等[41]认为驾驶员在经历振荡时,拥挤波旅行时间(即前车驾驶状态发生变化并引起后车状态变化所需的时间差)会出现3 种应对模式(上三角、下三角、不变)。进一步,CHEN等[42]分析交通振荡的实测轨迹数据,认为驾驶员特性决定了其对交通振荡的反应,激进型驾驶员常会出现上三角应对模式;保守型驾驶员常会出现下三角应对模式;普通型驾驶员则会等可能的出现上述3种应对模式,并认为这些应对模式和振荡的形成与传播有关。
JIANG 等[25-26]以HFVP 数据为研究对象,发现在不同头车速度情况下,交通振荡呈现凹增长模式,即交通振荡在沿车队交通流上游方向传播过程中,以车辆编号(车队的头车编号为1)为横坐标,车辆的速度标准差为纵坐标时,速度标准差是编号的凹函数,如图2(b)所示。HFVP 数据模拟的是以慢车导致的移动瓶颈的情况,TIAN等[23]以NGSIM数据为研究对象,分析了固定瓶颈下的交通振荡增长现象。选择了9 个完整包含交通振荡产生和发展过程且头车速度尽可能稳定的车队进行研究,发现固定瓶颈附近的交通振荡也呈现凹增长模式,并认为车辆的换道行为和瓶颈类型不会对凹增长模式产生定性影响,如图2(d)所示。随后,TIAN 等[22]进一步发现交通振荡的凹增长模式与跟驰行为的随机性有关。
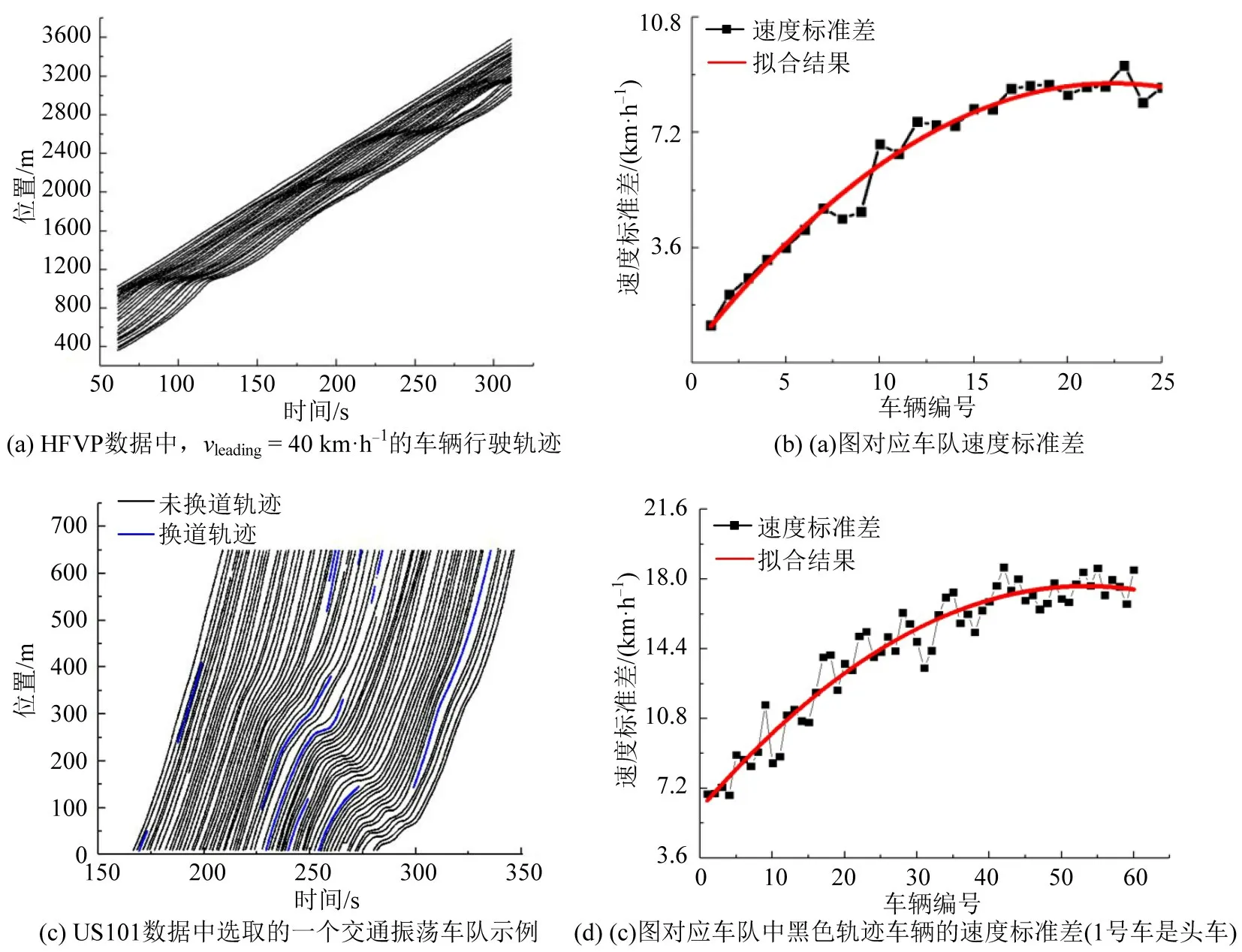
图2 不同瓶颈类型下的交通振荡凹增长示意Fig.2 Schematic diagram of concave growth pattern of traffic oscillations under different bottleneck types
1.2 交通回滞
交通回滞是指交通流由自由流变为拥挤流时的密度表现出高于反方向相变时车辆密度的现象[43],如果控制道路占有率变化,当占有率从低增长到高、从高减小到低时,会得到两条不完全重叠的曲线。在速度-间距平面上,交通回滞表现为两条不完全重叠的速度-间距曲线。通过分析6个轨迹数据集中的44 个回滞,LAVAL[44]认为回滞可能与激进型和保守型驾驶行为有关。通过分析NGSIM 轨迹数据,CHEN 等[45]认为交通回滞的发生、回滞的类型与驾驶员在经历振荡时的驾驶行为及驾驶员对减速波开始反应的时间密切相关。实测回滞现象如图3所示。
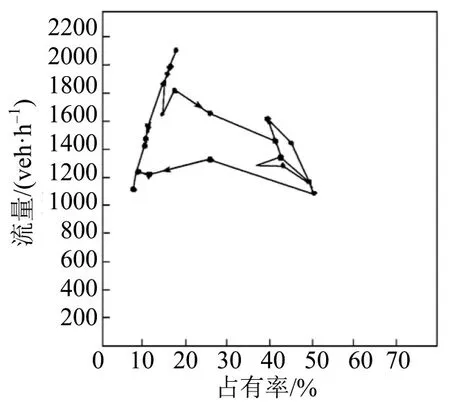
图3 实测回滞现象[46]Fig.3 Empirical hysteresis phenomenon[46]
2 跟驰行为分析
交通流关键实测现象可以视为是驾驶员微观跟驰行为的集聚展现。因此,深入分析驾驶员的跟驰行为对了解交通流现象的产生和发展机理有重要作用。跟驰行为包括:不对称跟驰行为、稳定跟驰行为的存在性、跟驰行为记忆效应、随机性、任务难度、异质性等。
2.1 不对称跟驰行为
不对称跟驰行为是指驾驶员在加速与减速过程中存在行为差异[47],通常指加速过程比较缓慢,而减速过程相对急促的现象。通过分析NGSIM轨迹数据集,YEO 等[48-49]发现在车辆速度-间距平面中,加速度曲线低于减速度曲线,提出了非对称驾驶行为理论。通过利用NGSIM数据进行模型的参数标定,TORDEUX 等[50]发现参数分布在加速和减速情况下有明显不同。WEI 等[51]构建了支持向量跟驰模型,通过分析标定NGSIM 轨迹后的模型参数,发现了不对称性,并且交通回滞的大小与不对称性行为的强弱呈正相关。LI 等[52]通过分析NGSIM时走时停车辆轨迹发现驾驶员加减速的非对称性,即当车头间距较大时,大多数车辆处于加速状态,此时加速度随车头间距的变化较为缓慢;车头间距较小时,大多数车辆处于减速状态,此时加速度随车头间距变化较为急促,认为车头间距是影响车辆加减速非对称特性的重要因素。
2.2 稳定跟驰行为的存在性
通过分析道路交通流的检测器数据,KERNER[53-54]将拥挤交通流细分成宽运动堵塞和同步流,在此基础上提出三相交通流理论。三相交通流理论假设稳定跟驰行为若体现在速度-间距平面上,则呈现二维散步状态(即不存在基本图),然而传统的基本图方法则认为稳定跟驰行为在速度-间距平面上呈现一一对应的函数关系(即基本图),两者存在一些争议,但两种理论都假设存在稳定的跟驰行为。TIAN等[55]以NGSIM数据为研究对象,选取前后车速度差小于0.1 m·s-1的数据进行分析发现,即使实际间距与期望间距非常接近,跟驰车辆仍会出现较大的加速度或减速度,说明稳定跟驰行为实际上可能不存在。
2.3 跟驰行为的记忆效应
研究人员发现一些复杂的交通流现象可能是由驾驶员的记忆效应引起的[56-57]。记忆效应指驾驶员的驾驶决策受到其所处的前一段时间的交通状态的影响。WANG等[58-59]通过研究基于深度学习的跟驰模型,发现考虑历史信息可以减少模型误差以及具有长记忆效应的模型可以模拟回滞现象。
2.4 跟驰行为的随机性
近年来,跟驰行为的随机性愈发受到关注。利用HFVP数据,TIAN等[22]通过分析车辆的加速度残差发现加速度残差可以用均值回复过程描述并且残差的标准差与加速度标准差的比值沿车队上游方向减小。表明当交通振荡的幅度较小时,振荡的增长主要由随机因素决定,而随着振荡幅度的逐渐增加,速度调整效应的作用在逐渐增强。
2.5 跟驰行为任务难度
驾驶任务难度描述了驾驶员所感知的当前驾驶任务的难易程度,是由驾驶员的驾驶能力和驾驶任务需求之间的动态交互作用产生的。驾驶员的驾驶能力与驾驶员的特性有关,驾驶任务需求则是由环境条件、车辆特性、速度和间距等组合产生的。FULLER[60-61]认为驾驶任务难度控制了驾驶行为。当能力超过需求时,任务是简单且在驾驶员的控制范围内的;当任务需求超过驾驶员能力时,则可能发生失控。SAIFUZZAMAN 等[62]利用车辆速度、间距等信息构建了驾驶任务难度指标。通过分析NGSIM 中7 组振荡的数据,认为驾驶任务难度的分布与交通振荡的演变存在着密切联系,同时,驾驶任务难度也与回滞的产生有关,车辆减速和加速阶段平均驾驶任务难度水平的差异越大,回滞两个分支的距离就越大。
2.6 跟驰行为的异质性
跟驰行为的异质性包括驾驶员之间的异质性和驾驶员自身的异质性。驾驶员之间的异质性描述的是驾驶员与驾驶员之间的跟驰行为存在差异,例如,有些驾驶员比较激进,而另一些则比较保守;驾驶员自身的异质性指即使在完全相同条件下,驾驶员的跟驰行为也可能会随时间变化的特性,例如,驾驶员有时比较激进,有时比较保守。
OSSEN 等[63-65]、KIM 等[66]、CHIABAUT 等[67]、XIE 等[68]、AGHABAYK 等[69]以及ZHENG 等[70]发现驾驶员之间的异质性是显著的,不同驾驶员不仅考虑不同的刺激(例如,速度差、车间距等),而且这些刺激的影响程度也存在差异。与驾驶员之间的异质性相比,驾驶员自身的异质性则较难观测。HUANG等[71]发现驾驶员自身的异质性对交通流的演化有显著影响。基于HFVP数据分析,TIAN等[21]发现驾驶员个体的拥挤波旅行时间存在较大的随机性,并且其增量服从均值回复过程,进而构建了用拥挤波旅行时间描述驾驶员自身异质性的数学模型。
3 仿真模型构建
轨迹数据包含的丰富信息催生了新的交通流仿真模型。微观模型大体上可以分成3 类:第1 类是基于行为假设构建的模型,即通过假设的驾驶行为构建模型,例如,优化速度模型假设驾驶员依据优化速度来调整加速度;第2类是基于行为假设与数据分析构建的混合模型,利用轨迹数据分析跟驰行为,从数据中提取规律并建立模型;第3 类是基于数据驱动方法的模型,使用数据驱动方法从轨迹数据中探索变量之间的关系而建立模型。
本文主要关注基于跟驰行为研究而构建的第2类模型,这些模型对跟驰行为的关注各有侧重,但都能较好地描述它们关注的交通流现象。随着数据收集技术的提高以及开源数据的不断增加,混合模型逐渐成为跟驰模型的重要发展方向。跟驰模型的本质是描述驾驶员的跟驰行为。混合模型从轨迹数据中提取跟驰行为的发生和作用原理,提出行为假设和相关的数学描述,能更加客观真实的描述驾驶员的跟驰行为和解释微观跟驰行为与宏观交通流现象之间的本质联系。
3.1 两态元胞自动机模型
两态元胞自动机模型[55](Two-State Model,TS模型)假设驾驶员在行驶过程中存在正常和保守两种驾驶状态。通过这两种状态之间切换,TS 模型不存在稳定的跟驰行为。模型规则如下
(1)加速/减速


(3)车辆移动

式中:vn(t)、xn(t)、vn(t+1)、xn(t+1)分别为车辆n 在t 时刻和t+1 时刻的速度和位置;a 为车辆加速度;vmax为车辆最大速度 ;有效间距dn(t) 为t 时刻车辆 n与其前车 (n-1)的间距,vanti(t)=min[dn-1(t),vn-1(t)+a,vmax] 为前车的期望速度(后车对前车下一时刻的速度评估),dn-1、vn-1分别为前车的间距与速度,gsafety是安全控制参数;rand(⋅)为0~1 之间均匀分布产生的随机数;为随机慢化减速度,bdefense为进入保守状态后的随机慢化减速度,且bdefense≥a ; T为期望时间间距 ;为随机慢化概率,为截止t 时刻车辆连续静止的时间,tc为慢启动参数,pb为慢启动概率,pc、pa分别为正常状态、保守状态时的随机慢化概率。在TS模型中,当驾驶员进入保守状态后,对应的实际行为变化是减速概率从pc增加到pa,并且减速度的数值从a 变为bdefense。
3.2 随机速度调整模型
随机速度调整(Stochastic Speed Adaptation,SSA)模型是通过描述跟驰行为的随机性和速度调整行为而构建的模型[22]。SSA模型假设:当车间距在无差异区域时,车辆的加速度将由速度调整和随机因素决定;当车辆间距在无差异区域之外时,车辆自由行驶或安全减速,这个过程可通过其他确定性跟驰模型模拟。SSA模型规则为

式中:Δvn(t-τ)为车辆n 与其前车的速度差;τ 为时间延迟;λ 为速度差的反应系数;amax为最大加速度;εn由简化的Vasicek模型[72]决定,即

式中:Wn为Wiener 过程;dWn服从均值为0,方差为dt 的正态分布;σ 为瞬时波动率;εn将围绕均值0随时间演变;κ 为回复速度,表征εn返回均值0的速度。分别表示无差异区域的最小和最大值,其定义为
式中:TBoundary为Boundary 条件下的期望时间间距;s0为停车间距。
3.3 驾驶任务难度跟驰模型
SAIFUZZAMAN 等[62]从驾驶任务难度角度分析交通振荡及回滞,并定义任务难度为

式中:ϖn(t)为驾驶员n 在t 时刻感知到的任务难度,ϖn(t)=1 表示任务需求的感知水平等于驾驶员能力,ϖn(t)>1表示任务需求高于驾驶员能力,驾驶员感受到了任务难度;Tn为期望的时间间隔;δn为风险参数,表示由人为因素引起的感知风险,正风险参数表示驾驶员承认人为因素造成的损害,并感知驾驶能力降低的风险,因此,任务难度的感知水平增加,负风险参数表示驾驶员低估了风险的攻击性驾驶;γ 为敏感度参数,用于捕捉驾驶员对任务难度水平的敏感度。由式(7)可知,任务难度随速度的增加或间距的减小而增加。
SAIFUZZAMAN 等[73]进一步将ϖn(t) 与传统的跟驰模型结合,构建能模拟任务困难度的跟驰模型。以IDM 模型为例,考虑任务难度的IDM 模型为
3.4 考虑异质性的跟驰模型
本文介绍基于IDM和Newell模型的考虑跟驰行为异质性的模型。
HUANG等[71]发现驾驶员在不同组实验中的驾驶行为表现有显著差异,因而构建了一个考虑驾驶员自身异质性的改进IDM模型为
式中:αn(t)为新增参数。模型假设αn(t)、期望时间间距Tn(t)在每个时间步中都会按如下方式进行更新,即
式中:β、υ 为模型参数;p1、p2、p3为概率值;r1、r2为介于0和1之间服从均匀分布的随机数。模型中T2,n的阈值也会随时间而变化,增强了驾驶员自身的异质性。
TIAN等[21]发现拥挤波旅行时间的变化存在随机性,且其增量遵循均值回归过程。基于此,在Newell 跟驰模型的基础上,提出随机Newell跟驰模型,即

式中:ςn(t)为正态分布的变量,均值0,方差。
4 结论与展望
车辆行驶轨迹数据对于交通流的理论研究与应用研究十分重要。近年来,研究人员在数据收集和分析方面开展了大量工作。本文简要回顾了与轨迹数据收集相关的历史,并从交通流关键实测现象、跟驰行为分析、仿真模型构建3 方面介绍了现阶段基于轨迹数据的相关成果。下面探讨这3 方面的研究现状及展望。
4.1 交通流关键实测现象
(1) 交通流数据尤其是车辆轨迹数据仍然较少。由于自然环境数据覆盖的道路长度有限及实际交通流构成的复杂性,实验环境数据易受车辆数目或安全、场地等条件的限制,交通流数据尤其是车辆轨迹数据采集的工作并不太多。(2)非常规环境下的交通流数据仍较为缺乏。现阶段大部分数据是在常规交通条件(平直公路、正常天气等)下采集得到的中速、低速数据,非常规条件下或高速交通流状态下的相关研究仍较少[75-76]。(3)同步流及与之相关的关键交通流数据缺乏。作为三相交通流理论的关键支撑,能够描述同步交通流现象及其与其他交通流相位之间相互转换的车辆轨迹数据集几乎没有,对研究全面掌握交通流时空演化特征形成制约。(4)大部分交通流现象的机理仍未完全厘清。虽然既有研究提出了许多理论和模型(例如,驾驶任务难度理论、驾驶员驾驶特性角度)来解释和再现交通振荡、交通回滞等现象,但目前缺乏统一公认的理论或模型[77]。
UAV等便捷且低成本数据收集工具的普及、图像处理等技术的发展为收集轨迹数据提供了便利。未来研究,一方面,可着力于收集更多的轨迹数据,例如,常规交通环境下各类道路状况的轨迹数据、非常规交通环境(带有坡度的公路、雨雪雾等天气)下的轨迹数据、车辆高速跟驰状态下的轨迹数据、同步交通流状态下的轨迹数据等,为彻底理清交通流现象的产生机理提供数据支持;另一方面,伴随更多数据的收集,也可通过构建更加普适的理论或模型解释交通流现象的产生及时空演化过程。
4.2 跟驰行为分析
(1)利用跟驰轨迹数据分析跟驰行为作用机理及其对交通流的影响的研究仍较为缺乏。虽然跟驰行为的一些特性引起了学者们的注意并应用在建模及机理分析中,但基于轨迹数据的研究仍较为缺乏,例如,利用轨迹数据量化驾驶行为、验证驾驶行为假设等。(2)跟驰行为分析较少涉及驾驶员的生理、心理特征。在车辆行驶过程中,驾驶员的心理和生理会受到诸多刺激的干扰,进而影响其驾驶行为。例如,受到外界刺激而紧张时,驾驶员可能会出现呼吸加剧、心率加快等一系列生理反应,同时导致注意力分散、判断力下降等心理变化,最终引起驾驶行为改变。但目前试图准确量化这些生理、心理特征(例如,视觉、压力、分心、情绪、态度)的研究不多,且对于不同生理、心理特征对跟驰行为重要性的研究也没有。
未来研究,一方面,可以在轨迹数据分析的基础上进一步挖掘跟驰行为的特性及机理,包括:利用轨迹数据量化驾驶行为、验证驾驶行为假设、分析驾驶行为对交通流时空演化的影响等。另一方面,由于开展交通流实验为采集驾驶员生理、心理数据并将其与车辆行驶轨迹数据结合分析提供了可能,可研究如何准确量化这些生理、心理特征及这些特征的重要程度,并将内在生理、心理变量与外在跟驰行为变量相联系,分析其对跟驰行为、交通流时空演化的影响,对于全面理解驾驶行为具有重要意义。
4.3 仿真建模研究
(1)基于行为假设与数据分析构建的混合模型仍在发展。基于行为假设与数据分析的混合模型具有多数变量物理意义明确、模型结构清晰易于理解等优点,但此类模型较少。(2)现有模型中很少考虑驾驶员生理、心理变量。在驾驶过程中,驾驶员的心理和生理会受到诸多刺激的干扰,进而影响驾驶行为。但如何准确量化生理、心理变量并将其考虑进跟驰模型中的研究仍不多。(3)基于数据驱动方法的仿真模型正在蓬勃发展。除了基于行为假设与数据分析构建的混合模型外,近年来基于数据驱动方法的仿真模型也得到了极大发展。不拘泥于各种理论假设和数学推导,基于数据驱动方法的仿真模型是利用机器学习方法从轨迹数据中探索变量之间的关系而建立模型[36]。此类研究通常选取车辆的跟驰变量作为输入,加速度或速度作为输出。常用的机器学习方法[78]包括:人工神经网 络[79-82]、支持向量机[51,83-85]、实例学习[86-87]、深度学习[58,88-90]等。虽然有研究认为基于数据驱动方法的模型比基于行为假设的模型的参数标定结果要好(例如,单车轨迹标定的误差更小),但是标定结果并不能全面反映交通流仿真模型的真实性能。同时,基于数据驱动方法的仿真模型对交通流现象的产生与演化机理的解释能力往往较弱。
在未来研究中,基于行为假设与数据分析构建的混合模型、基于数据驱动方法的仿真模型仍将是极具发展潜力的研究方向,同时可以在模型中考虑驾驶员的生理、心理特征,例如,视觉、压力、分心、情绪、态度等变量[91],以提高模型的现实解释度[86,92]。此外,也可研究模型的评价方法,综合考虑车辆轨迹误差等微观变量和交通流时空演化特征参数等宏观变量,注重模型对实际交通流的解释能力。