基于背景差分法的行驶中的汽车检测*
2021-10-26贾晓琪闫俊伢杨丽英
贾晓琪,闫俊伢,杨丽英
(山西工程科技职业大学,山西 晋中 030619)
0 引言
动态目标检测追踪是针对视频中运动的物体进行实时监测,在计算机技术飞速发展的今天,动态目标检测在计算机视觉、图像处理、视频监控、人机交互以及模式识别等领域有着重要的研究意义和实用价值[1]。动态目标检测其实就是将视频分解成视频图像帧序列,在每帧图像中检测出发生变化的目标,从而确定视频中运动的目标物体。
本文中,通过对截取视频中的每帧图像进行灰度处理,提取视频中的背景模型,即视频中的静止区域,然后获取视频中动态的目标区域,复原实现了背景差分法对视频图像中行驶的汽车目标检测[2]。在检测过程中,发现了检测过程中出现了边缘断裂情况,本文采用闭操作对复原实验结果中的微小空洞进行了填充,并在一定程度上连接了结果中出现的狭窄间断。
1 背景差分法算法
背景差分法又叫背景减法,该算法主要是通过对所获取的视频图像进行图像帧分解,并将分解的每帧图像与视频背景图像进行差分算法,由此得到视频中的运动目标[3,4]。
在进行背景差分运算之前,要先对获取到的视频图像进行灰度预处理,并截取为图像帧序列;然后通过高低阈值分割获取视频图像序列中的静止场景,当做后期差分算法的背景图像;差分算法之后,得到了灰度图像帧的运动区域,然后根据训练所得的阈值进行阈值化动态目标的提取。具体处理过程如图1所示。

图1 背景差分法处理流程示意图
1.1 视频分帧
视频通过数字形式记录一系列动态行为,为了能够顺利剥离出视频中静止的区域,我们必须对视频进行视频帧分解,也就是按照一定的时间把视频图像分解成一个图像序列,每一帧都是一张图片。接下来的所有步骤都是对当前得到的视频图像帧进行处理。
1.2 图像预处理
图像预处理主要是进行图像的灰度化以及图像滤波。这个过程我们主要通过Canny边缘检测算法实现。对图像进行灰度化处理,其实就是求图像的各个通道采样值的加权平均值,公式如下:
Gray=(R+G+B)/3.
(1)
对灰度图像进行高斯滤波算法从而抑制图像中存在的噪声,突出图像边缘,提高背景差分法边缘检测的灵敏度,具体实施方法是:将高斯函数离散化,把高斯函数值作为权值,然后对灰度图中的各个像素点进行加权平均,来有效消除图像中的高斯噪声[5]。高斯滤波算法公式如下:
(2)
最后,为使图像中边缘轮廓线更加光滑,我们对预处理后的图像进行了闭操作,这样既能消除灰度图像中出现的细小空洞,还能对轮廓线的断裂进行自适应修复。
1.3 构建视频图像的背景模型
在灰度图中,我们可以采用多帧平均法来建立背景模型:将一段时间内的多帧灰度图像相加,然后求出它们的平均值,这个平均值就是背景模型[6]。
(3)
其中,Bn代表了第n帧视频图像中的背景模型;N是图像帧的帧数;B(x,y)是图像中的各个像素点的灰度值;In(x,y)为第n个视频图像帧中(x,y)的像素点值。
在实验过程中,因为获取视频的摄像头为固定位置拍摄,所以在一定程度上,也帮助了我们尽可能的消除了视频图像抖动对建模结果的影响;同时,为了消除光照对背景建模结果的影响,我们需要每隔一段时间就重新更新一次背景模型,所使用的公式如下:
(4)
1.4 图像差分运算及阈值化
首先,将当前图像帧的灰度图像的各个像素点的灰度值与构建得到的背景模型各个像素点灰度值进行差分,运算过程如下[7]:
En(x,y)=|Pn(x,y)-Bn(x,y)|.
(5)
其中,Pn(x,y)为当前图像帧灰度图像的像素点灰度值;Bn(x,y)为背景模型中各个像,得到的结果En为背景差图。
然后我们根据给定的阈值进行区分,对背景差图进行阈值化处理,具体处理算法如下:
(6)
其中,T为实验中设定的阈值;En(x,y)为1表示此像素点为动态目标区域中的像素点;En(x,y)为0表示此像素点为背景区域的像素点。最后像素点整合,实现灰度图像中的动静图像分割,从而达到动态追踪的目的。
2 实验过程
本文中,我们使用背景差分法模拟了对行驶中的汽车动态检测的实验,具体实验步骤如下:
1) 固定视频位置,选取人流较少的位置路段进行拍摄,获取视频图像,截选只有车辆出现的视频段保留使用。然后将视频图像分解为视频图像帧序列,我们以每秒25帧图像进行分解,图2列出其中两帧图像。

图2 视频序列中的两帧图像
2) 对图像帧序列进行预处理,求图像的各个通道采样值的加权平均值,从而得到灰度化后的视频图像帧,如图3所示,列出了其中两帧图像。

图3 灰度化处理
通过高斯滤波算法进行灰度图像的边缘检测,并使用闭操作填补和连接断裂,从而连接了在图像预处理过程中,被误分为许多小块的目标区域。
3) 对灰度图进行平均法建立背景模型,为背景差分算法做准备,建立的背景模型如4所示。
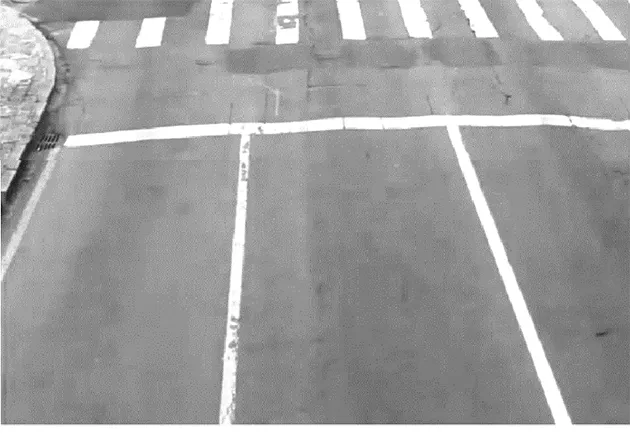
图4 背景建模
4) 根据所建立的背景模型进行背景差分法,得到灰度图像之间的灰度差值,也就是背景差图,我们设定阈值为80,根据阈值化方法对差图中的动态区域进行分割,最后得到视频行驶中的车辆目标,如图5、图6所示。
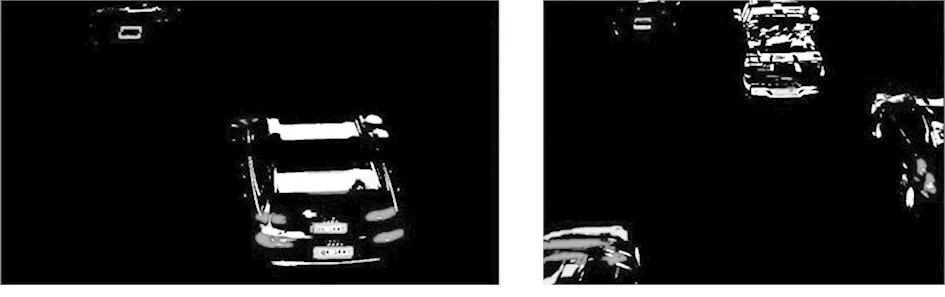
图5 背景差分法追踪动态目标

图6 动态目标追踪结果
3 结论
实验过程中,我们对视频图像进行了图像帧分解和图像预处理,在得到的灰度图像帧序列中较好地分离出了背景模型,为了消除光照对实验结果的影响,背景模型隔一段时间就要更新一次;同时,为了让检测结果能够更完整,我们采用闭操作进行了断裂的填补。
通过模拟实验,我们发现背景差分法能较好地处理动态目标简单的视频图像序列,加上闭操作可以改善检测效果。对视频进行图像帧的分解后,逐一进行灰度处理,处理后的图像帧能够很好的分离出背景模型,便于之后的背景差分步骤的进行。