基于可拓学的下肢康复机器人结构方案生成研究
2021-10-26郑皓冉秦建军杨芳
郑皓冉,秦建军,杨芳
(1. 北京建筑大学机电与车辆工程学院,北京 100044;2. 北京建筑大学城市轨道交通车辆服役性能保障北京市重点实验室,北京 100044)
1 引言
如今,在机器人结构方案确定的过程中,经常会面临结构设计烦琐、控制编程困难等问题,而过于繁杂的方案确定步骤会导致产品生产预算增加、研发时间延长。从提升消费者的满意度以及产品的功能性出发,设计能够满足消费者需求的机器人产品,能够使得产品研发更加具有针对性,提高产品在市场之中的竞争力。文献 [1]以医患双方的需求作为出发点,设计了满足医患双方需求的颈颅电磁治疗仪,增加了产品在同定位医疗器械中的竞争力。文献 [2]指出,康复机器人能够有效辅助医师进行治疗,提高病人的康复疗效,具有较强的市场竞争力。在康复机器人的结构方案生成上,利用消费者需求到产品功用再到结构设计的方式进行研究的内容较少。文献 [3]以解决康复机器人控制问题的角度出发,进行了样机的研制与实验。文献 [4-9]虽对产品的设计方法进行了不同程度的分析研究,但缺乏模型化、形式化的理论工具,使得操作的便携性较弱。学者们利用可拓学中的可拓论及可拓创新方法等知识,解决了研究中面临的问题。赵燕伟提出了利用可拓学理论,对机械产品从功能到结构进行研究的方法。张文林等人结合可拓论下的基元理论与发明问题解决理论(TRIZ)模型分析法,形成了一种更加直观的、形式化的解决问题的分析方法。邢鹏等人,利用可拓论中物元与关联函数理论,提出了一种传感器的选型与评估方法,并结合实际算例,验证了其可操作性。米晶晶等人将可拓变换原则应用于专利的创新设计中,通过提取与构建专利的功能基元可拓模型,利用可拓变化方法完成专利的创新变换。李仔浩等结合可拓设计方法与逆向设计思想,得到了一种基于逆向设计的可拓创意生成流程,解决了产品设计与创新过程中的矛盾问题。通过以上文献所述,可拓学方法在机器人结构方案生成的事例较为少见。本文基于机器人结构与硬件设计的有关知识,结合可拓学中的基元、拓展分析理论,针对下肢康复机器人构建了结构方案生成的流程,得到了下肢康复机器人的可拓结构方案,增加了研发效率,并拓展出一种逻辑化、形式化的产品设计思路。
2 下肢康复机器人结构方案生成流程
可拓学是一门解决矛盾问题、扩展分析思路的学科。也是将生活中的问题、事物形式化分析,从而解决问题、开拓创新的一种有效途径。结合现代设计方法中的知识,可拓学能够广泛应用于产品设计研发、工业设计等诸多领域,并对各领域生成问题的解决方案起到重要的作用。本文中结合可拓学与机器人领域的相关知识,从基础的消费者需求事元出发,将其依次进行功用事元、结构关系元的形式化映射,并利用可拓学中不同形式的可拓分析方法,得到下肢康复机器人的多种结构方案。目前的产品结构设计的流程多为:产品创意设计、方案筛选以及方案试制三个步骤,而其中常会出现成本消耗过高、消费者使用性能下降、开发周期较长等问题。利用可拓学中的可拓分析知识,在对消费者需求进行聚拢,并得到关键性的需求后进行映射,从而获得具有针对性的多种结构方案。后参考专家评估结果对不同方案进行打分。最后利用综合优度评价法得到较优的结果作为最终的设计方案。结合可拓分析与关系映射方法的下肢康复机器人结构方案生成的流程如图1所示。
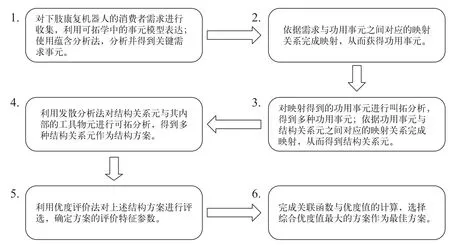
图1 下肢康复机器人结构方案生成流程
3 消费者需求事元的构建及拓展分析
(1)消费者需求事元的建立
消费者需求是产品的设计创新的关键点,消费者需求能够通过可拓学基元理论中的事元模型进行表达如下:
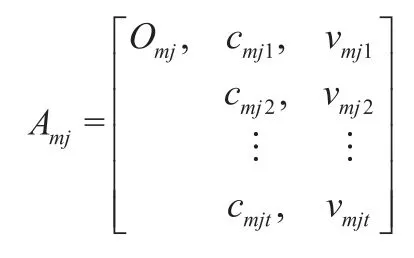
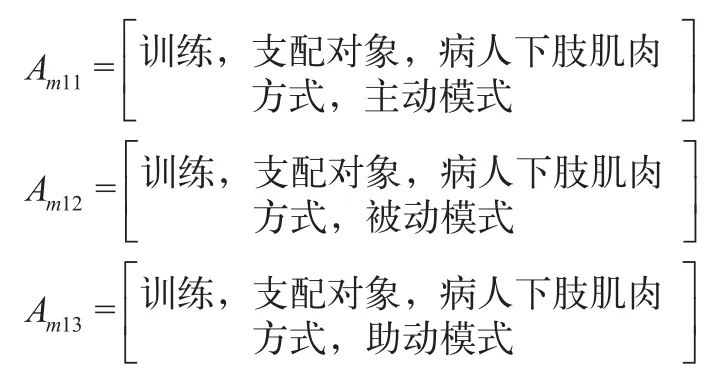
将消费者对下肢康复机器人的使用反馈以及一些市场调研的结果进行整理,利用上述事元模型的表达方式,对整理出的多种需求进行形式化表达如下:
(2)消费者需求事元拓展分析-蕴含系法
在下肢康复机器人的设计研发过程中,消费者关键需求的获取,是整个设计流程中重要的一环。同时对产品研发人员起到重要的指导作用,当为首先解决的问题。从上述需求事元可以看出,消费者对产品需求是多方面的,本文采用了拓展分析方法中的蕴含系法,对不同需求进行分类整合,从而得到消费者关键需求。
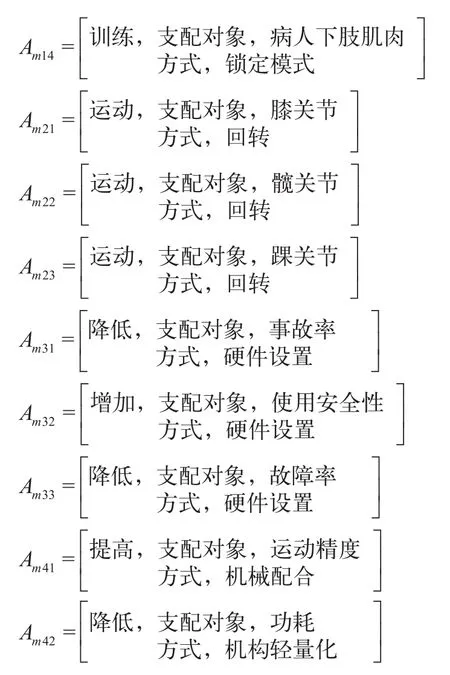
将上述所得到的所有消费者需求整体分为四大类,分别为:训练模式类(A
,A
,A
,A
)、运动形式类(A
,A
,A
)、设备安全性类,(A
,A
,A
)以及综合性能类(A
,A
),结合机器人设计的有关知识与可拓学的蕴含分析原理,得到消费者需求事元间的蕴含关系如下所示: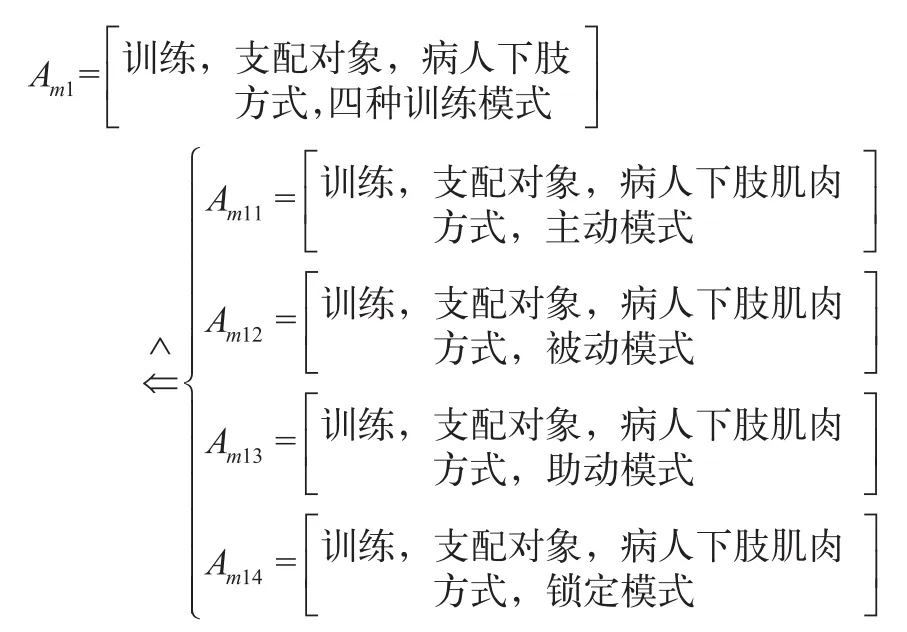
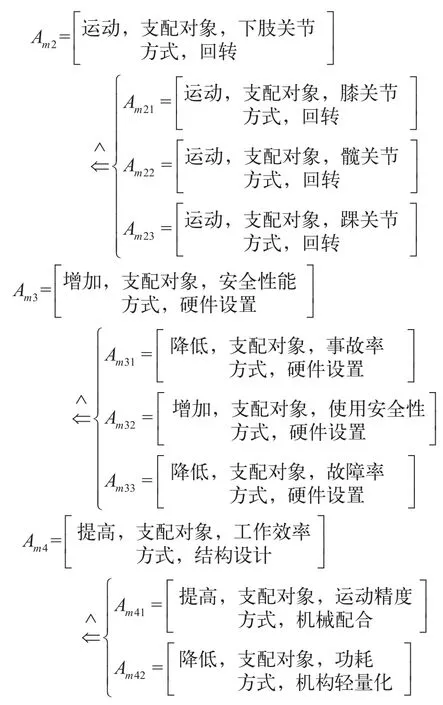
对已经得到的四大类关键需要进一步分析,可知:
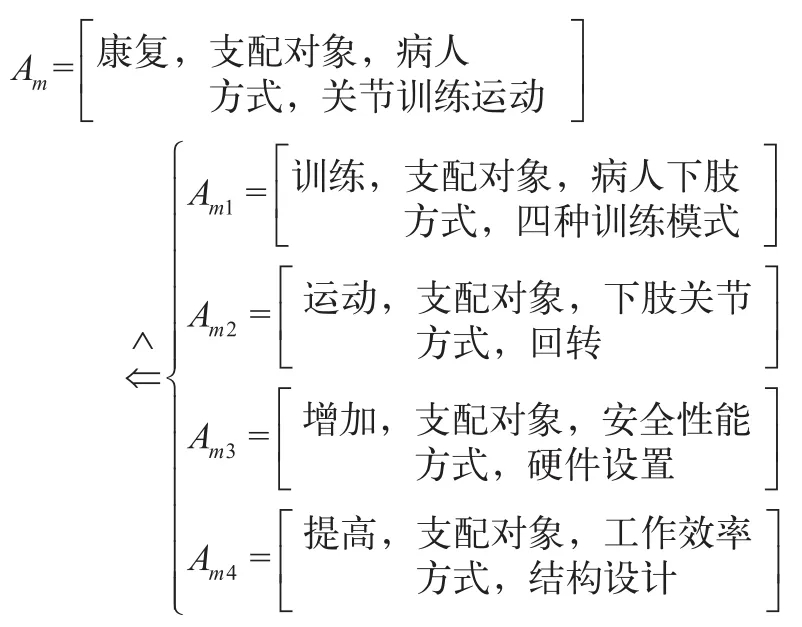
依据分析结果,可将消费者需求事元的蕴含系模型以图形进行表达,如图2所示。
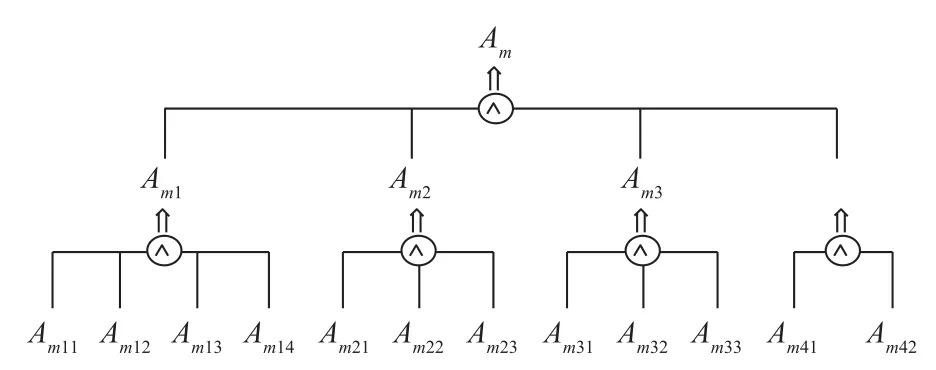
图2 消费者需求事元的蕴含系模型图
4 需求-功用-结构基元的映射关系及可拓分析方法
(1)需求事元与功用事元的映射关系
在产品设计中,用户对康复机器人的不同需求对应着研发时需要考虑的产品功用。因此,产品研发人员若想更加高效的开发新产品,以消费者需求作为出发点,来建立形式化的产品研发思路,是较为科学的开发过程。产品的功用在产品投入市场时发挥着最核心的作用,为吸引用户群体的关键所在。收集并分析用户在使用产品时的动作能够对功能设计的合理性进行判断。因此,在对功用事元进行表述时,需要包括具体的使用工具或动作。其中,使用工具既可以是产品的一个模块,也可以是一个独立产品。
通过文献[21]所述可以得知,需求事元A
向功用事元A
进行映射的方式表现为赋予其多种特征与量值。依据文献[22]所述,需求与功用间的映射关系,在满足两者的动作、特征和量值完全相同,即O
=O
,c
=c
,v
=v
,i
= 1,2,…,z
,的条件下,映射关系可以通过以下复合事元进行表示: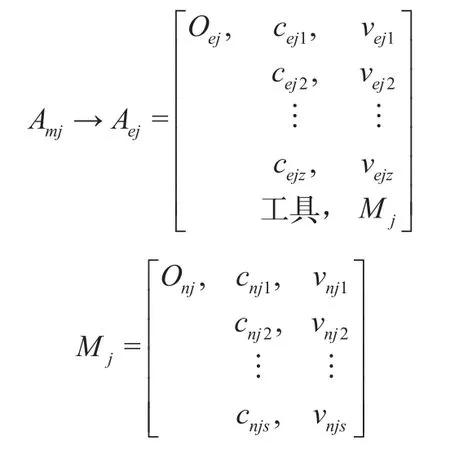
M
是工具所对应的量值,其作用为实现功用事元A
对应的功能,为多维部件物元。通过分析、了解消费者需求与功用模型之间的内在关系,有助于将消费者需求映射到下肢康复机器人的产品功用设计之中,提升设计的精准性、增强设计的针对性。由于篇幅受限,本文将以图2中A
为例,对其映射过程及可拓分析进行细致展开。其他需求事元向功用事元的映射以及后续可拓分析方式同理能够完成。下式为A
的映射过程:
(2)基于蕴含分析方法的功用事元可拓分析
对于一些能够直接从上述得到的功用事元向结构关系元进行映射的事元,可跳过此步骤进入下一步分析;而一些功用事元由于涵盖范围过广、较难实现,导致无法直接向结构关系元进行映射,则需要利用蕴含分析方法,先对功用事元进行可拓分析,得到多种易于映射的下位功用事元后,再进行映射。本文以需求事元A
映射得到的功用事元A
为例进行分析,为下一步的映射打下基础,分析得到的蕴含系模型如图3所示。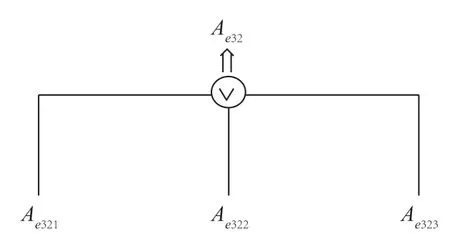
图3 功用事元 Am32 的蕴含系模型图
在功用事元A
的蕴含系模型图中,A
、A
、A
表示如下: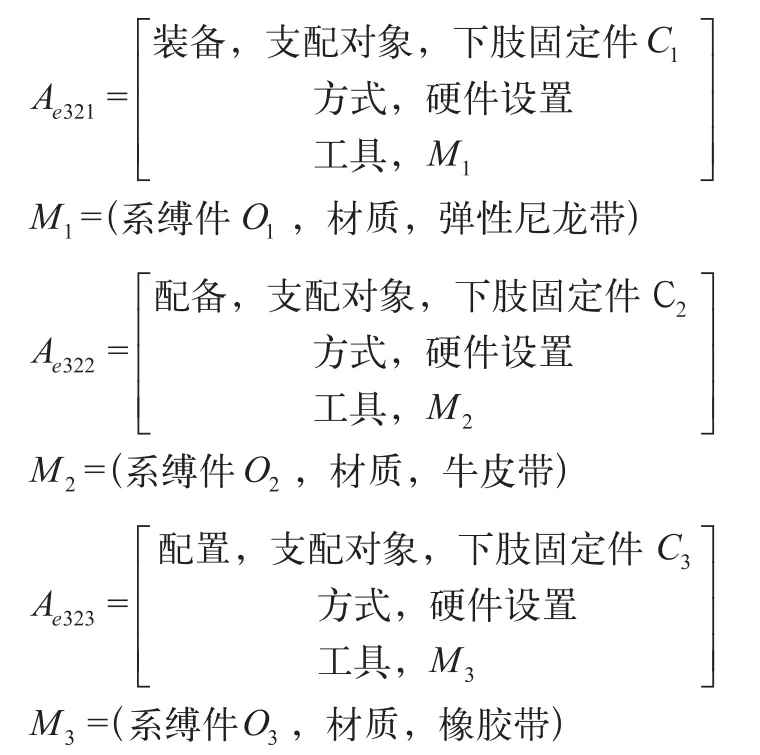
Q
、Q
、Q
三种类型,其中三种系缚件类型均可满足功用事元A
的功能性要求。因此,结合相关知识与市场调研,此蕴含系分析符合实际应用场景,能够进入下一步的分析。(3)功用事元与结构关系元的映射关系
产品功用向结构方向进行的映射又称功构映射,其目的是利用产品结构,实现对需求功用模型的求解,此步映射能够将功用事元中的功能性表达转变为能够实现此功能的结构尺寸、零件轮廓以及不同部件之间的连接关系的描述。
通过上述功用与结构的映射关系可知,要完成功用事元A
到结构关系元R
的映射转换,需通过赋予结构关系元R
对应的特征与量值实现。以功用事元A
的映射为例进行说明,其中M
表示功用事元A
的部件物元,M
表示产品本身,则功用事元A
向结构关系元R
进行的映射可表示如下: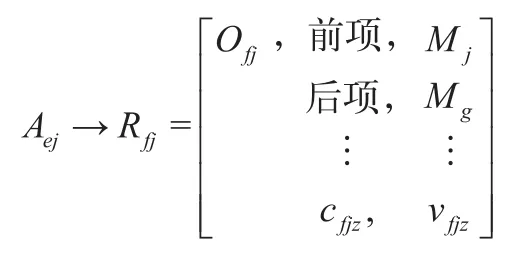
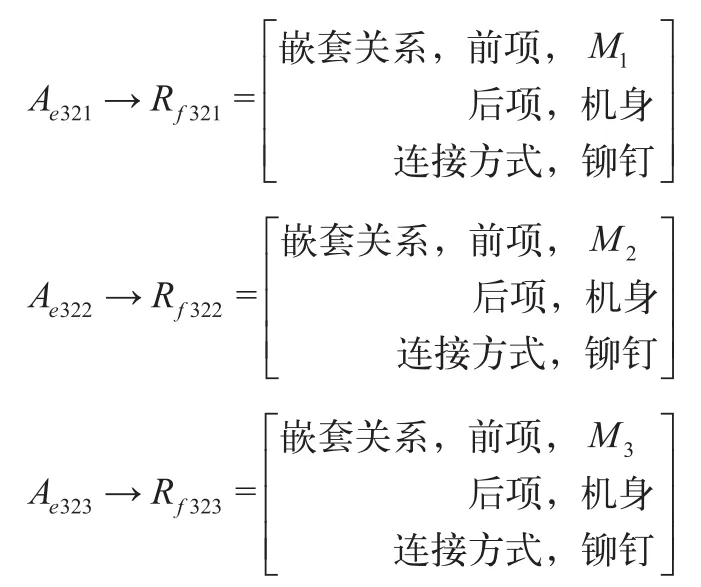
依据机器人机械结构设计知识,可将图3中得到的三个下位功用事元依次进行映射,得出的结构关系元结果如下:
(4)基于发散分析方法的部件物元及其对应关系元的可拓分析
一般来说,直接根据上部分得到的结构关系元进行设计,较难实现结构上的创新以及方案的多样化。因此,需要同时对部件物元和与其对应的结构关系元进行可拓分析,从而增加设计思路与方案多样性。
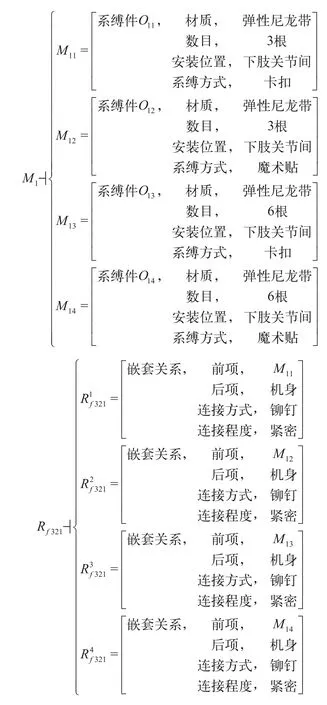
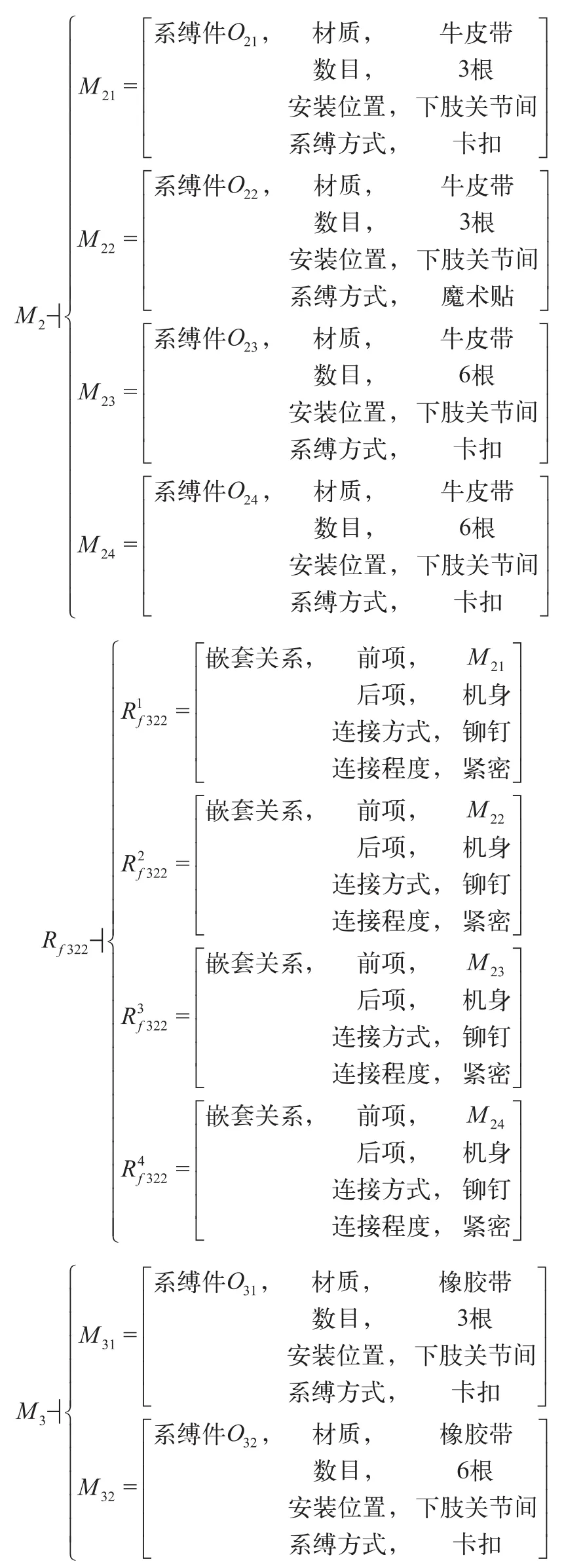
本文基于发散分析方法对部件物元及其对应的结构关系元进行扩展,利用“同对象多特征”的发散性质,对部件物元进行发散,得到多种能够实现需求功用的多维工具物元。同时,依次将对应的结构关系元发散分析,最终获得的各式结构设计方案如下:
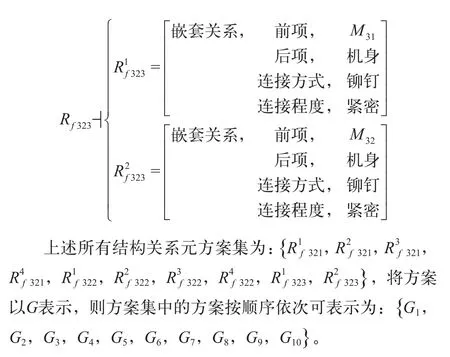
5 下肢康复机器人结构方案的优度评价与生成
由发散分析法所得到的多种结构方案,需要依据产品实际使用场景进行进一步的筛选。结构方案应尽可能满足市场需求与客观规律,才能够当选为最终的产品结构。本文结合了专家评估与可拓学中的综合优度评价方法,对发散得到的结构方案集进行评估,从而筛选出较优的结构方案作为最终选择方案。
(1)方案评价特征及其参数的确定
依据不同的评价指标与区间范围,专家给出的评价特征取值见表1。
表1 各结构方案评价特征取值
结构方案 系缚安全性(%) 系缚便利性 穿戴容错率(%)G1 94 0 83 G1 92 1 84 3 96 0 78 4 95 1 85 5 93 0 79 6 92 1 85 7 97 0 77 8 93 1 84 9 92 0 83 0 96 0 80
(2)方案的优度评价
利用依据上述方案评价特征的取值、权重系数,针对不同区间型的指标进行关联度、规范关联度及优度的计算,首先需要建立各方案评价指标的关联函数,作为衡量符合要求的程度。基于对上述评价指标及其评价范围的定义可知:系缚安全性指标为单区间型,其最大满意度值为100%,在区间最右侧,可利用简单关联函数进行建立;系缚便利性指标为离散型取值,则利用离散型关联函数建立;穿戴容错率指标为区间套型,两区间存在公共端点、最大满意值为90%且在区间套最右侧,则利用最优点在右侧的初等关联函数进行构建。系缚安全性、系缚便利性和穿戴容错率的关联函数如下所示:
将不同方案对应的特征取值依次带入上述关联函数中进行计算,得到各个方案的衡量指标关联度值见表2。
表2 各方案评价特征关联度值
结构方案 系缚安全性K1(x1)系缚便利性K2(x2)穿戴容错率K3(x3)G1 0.4 0 1.15 G1 0.2 1 1.2 3 0.6 0 0.9 4 0.5 1 1.25 5 0.3 0 0.95 6 0.2 1 1.25 7 0.7 0 0.85 8 0.3 1 1.20 9 0.2 0 1.15 0 0.6 0 1
利用如下的规范化公式,将表内方案关联度值规范化:

并根据评价特征的不同权重值,对以规范化的方案关联度值进行优度计算,计算公式如下:
则关联度值规范化与优度计算后形成的表格,见表3。
表3 各结构方案规范化关联度与优度值
结构方案关联度规范值 优度值C(Gj)K1(x1) K2(x2) K3(x3)G1 0.35 0 1 0.598 0.17 0.83 1 0.7302 3 0.67 0 1 0.6876 4 0.4 0.8 1 0.788 5 0.32 0 1 0.5896 6 0.16 0.8 1 0.7208 7 0.82 0 1 0.7296 8 0.25 0.83 1 0.7526 9 0.17 0 1 0.5476 0 0.6 0 1 0.668
从上述计算与分析结果可知,在需求事元A
向结构关系元映射所得到的10种方案中,结构方案4的优度值最大为0.788,其所对应的结构关系元为。因此,采用6根弹性尼龙带作为系缚件,并以魔术贴的方式进行系缚的结构,能够满足下肢康复机器人在安全性设计时的关键需求,为最佳的结构设计方案。6 结束语
本文采用了可拓学中的拓展分析方法,对下肢康复机器人的结构设计方案进行了研究与生成。通过收集与分析消费者需求,将其以可拓学中的基元模型表达,利用需求-功用-结构这三种基元的映射关系以及基元的蕴含分析,依次得到了产品的功用事元与结构关系元,后分别对产品的结构关系元与其对应的部件物元进行发散分析,获得了产品的结构方案集。利用优度评价法将结构方案集中生成的多种产品方案进行评估与筛选,得到了能够满足下肢康复机器人设计需求的最佳结构方案。此种方案生成流程,给产品的设计研发提供了一种更为逻辑化、形式化的思路。此外,本文的结构方案生成流程,只针对下肢康复机器人的系缚安全性结构进行了验证,能否应用于其他产品的结构设计过程中还需研究与考证。
