新型道路无线遥控电动绿篱机
2021-10-25邴贞淳王娜王海艳王靖霖姜云春
邴贞淳 王娜 王海艳 王靖霖 姜云春




摘要:本文以节能环保为前提,以城市道路绿篱带的养护需求为出发点,设计了一种无线遥控电动绿篱机控制系统。本设计产品可以提高城市道路绿篱带修剪作业效率和修剪质量,减轻了劳动强度;它改善了现有绿篱修剪机只能单面修剪、手持、低效以及适应性不强的缺点,能够同时进行多面修剪、且修剪高效、可以适应对不同宽度和高度的绿篱带进行修剪。绿篱机主要有修剪装置、驱动装置、控制装置组成。绿篱机的控制装置,选用STM32单片机为主控制芯片,对绿篱机的控制系统进行了硬件电路设计,同时对绿篱机进行了软件程序设计。
关键词:城市道路绿篱;修剪机;无线遥控
0前言
城镇化发展过程中的绿化建设程度,既反映该地区的经济发展水平又反映其精神文明的总体程度,同时也反映我国总体的小康水平社会的进程[1]。城市绿化建设工程的最主要的表现就是城市道路绿篱带的建设,它已经成为了城市建设中重要的一部分,与人民的日常生活密不可分。
现在市场上进行售卖的绿篱修剪器械多数是手持式的以汽油为燃料源的器械,或者是以卡车为载具的大型修剪器械,而且现在的绿篱修剪器械大多都是单面修剪的修剪器械,修剪的效率并不高[2]。同时,这些修剪器械都是需要人工进行操作的,一个人操作的时间和精力都是有限的,不能长时间地高效率作业。还有在作业的过程中,工作人员伴随有一定的噪音危害、气体污染和意外受伤的可能。
本设计为了解决这些问题,使用无线遥控的方式控制绿篱机,不但可以大大延长有效作业的时间和作业的效率,更能保障操作人员的身体健康和生命安全。所以,在城镇化建设的发展中,无线遥控电动绿篱机系统设计的研究有着重要意义。
1 设计要求及目标
依据对工作环境及植被种类的分析,无线遥控电动绿篱机的功能要求如下:
(1)修剪能力:要求能够对不同绿篱带进行修剪。
(2)刀具可调整:工作过程中能够根据工作环境的实际情况,在一定程度调节刀具的高度。
(3)稳定性与灵活性:绿篱机需要具有一定的爬坡能力,且在爬坡工作状态下不会发生打滑、倾翻等现象;绿篱机还需要具有原地回转的能力,满足快速行进的需要。
(4)减少工作人员和危险:不需要工作人员时刻跟车操作,在较远距离内通过遥控板进行操控。
2 新型道路无线遥控电动绿篱机设计方案
基于上述对作业对象、作业环境、作业需求进行的分析,对绿篱机总体结构进行设计。
本设计中,绿篱机的结构可分成修剪装置、驱动装置、控制装置三部分。修剪装置包括修剪刀具、升降平台及往复伸缩电机。驱动装置采用轮式结构,由底盘、电机支架、橡胶轮胎及驱动电机等组成。控制装置由STM32单片机最小系统、驱动电路、无线遥控模块、电源等组成。
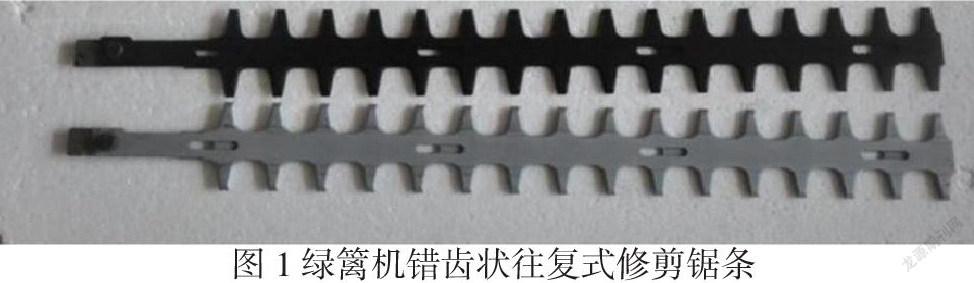
(1)修剪装置。本设计共设计有两组修剪装置,包括一个平放在顶部修剪装置与一个竖放在侧面的修剪装置,在这两个修剪装置中,各有一对锯齿刀具完成修剪工作。如果平放在顶部修剪装置的修剪高度大于竖放在侧面的修剪装置的修剪高度,会使得绿篱带的上面和侧面相交的边线处的绿篱枝叶出现修剪不彻底的情况,所以平放在顶部修剪装置应该低于竖放在侧面的修剪装置的修剪高度,这样的刀具放置方法可以保证边线处的绿篱枝叶得到更好的修剪,以达到更完美的修剪作业。
(2)驱动装置。本设计是无线遥控电动,只需要考虑驱动装置的可靠性与简单易用性,驱动装置无须有太过强大的动力和功能。绿篱机的整体负载在40千克左右,所以采用纯电机驱动,它的优点是成本较低,安装简易,使用方便,传动效率较高。
根据绿篱机实际需要,本设计为四个驱动电机独立驱动,四个橡胶轮胎分别由一个驱动电机带动,动力传递相互不干扰,直接由驱动电机传递到橡胶轮胎,传动链短,效率高,驱动方便灵活。
(3)无线遥控装置。Wi-Fi模块是基于IEEE802.11标准创建的无线局域网技术,所使用的协议是802.11标准,在2.4Ghz频段工作,所支持的速度最高达54Mbps,传输距离大概为100m,其他设备通过连接无线通信模块产生的Wi-Fi,实现无线网络通信。根据新型无线遥控绿篱机的具体设计和其工作情况,选择Wi-Fi模块作为本设计的无线遥控模式。
3 新型道路无线遥控电动绿篱机控制系统设计
无线遥控电动绿篱机的控制装置是整个绿篱机的核心部分所有指令都由这里接受和发出,因此控制装置的可靠性和稳定性就很重要了。本设计选用WiFi连接,整个无线遥控系统能够准确的接受到外界控制器发出的指令,并准确傳达给中央控制器,具有反应快,接受范围广,延时低的特点。Wi-Fi模块是基于IEEE802.11标准创建的无线局域网技术,所使用的协议是802.11标准,在2.4Ghz频段工作,所支持的速度最高达54Mbps,传输距离大概为100m,其他设备通过连接无线通信模块产生的Wi-Fi,实现无线网络通信。
(1)首先,打开电源开关,12V电源向电路板供电,一部分流向4个驱动电机,2个升降电机,2个往复伸缩电机;一部分降压到3.3V,流向STM32控制芯片和Wi-Fi无线遥控模块。
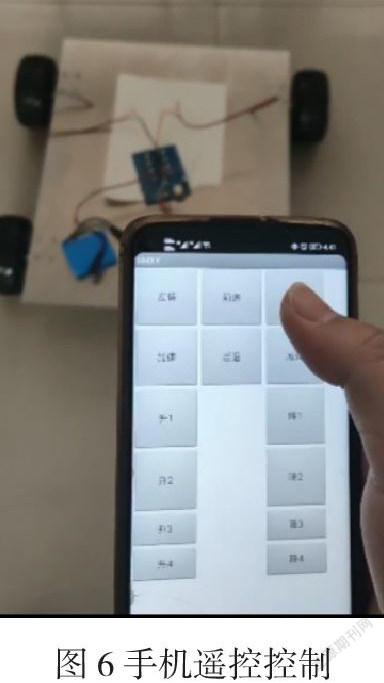
(2)打开手机遥控App,进行与绿篱机Wi-Fi无线遥控模块的配对。
(3)配对成功后,通过手机遥控App发送指令,Wi-Fi无线遥控模块接收指令,STM32控制芯片执行指令,最后绿篱机各个部分完成相应的动作。控制系统工作流程如图所示。
4 新型道路无线遥控电动绿篱机系统调试
新型道路无线遥控电动绿篱机系统升降平台共有两组,采用推杆电机作为它的升降动力。该装置由一件12V平底电动推杆电机作为动力源,其行程为205mm~305mm,速度12mm/s;其升降平台为200*200mm的不锈钢升降台。
现组装、调试情况良好,升降功能均能实现,调试实物如图5所示。
将所有的程序下载到STM32单片机中,将所有的硬件部分组装完成,检查软硬件的情况。手机遥控系统如图6所示。
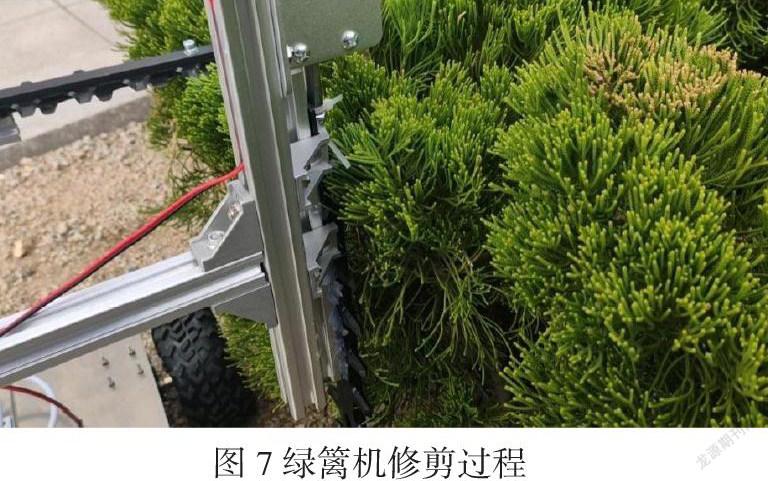
绿篱机修剪过程如图7所示。
5 结论
本文主要对无线遥控电动绿篱机的机械部分进行了研究设计,并搭建好了绿篱机的实物,其次是完成了绿篱机控制系统的设计和功能实现。最后的测试结果证实了本设计的稳定性及可行性。
参考文献:
[1]齐艳辉.城镇化进程中的绿化建设现状与对策[J].绿色科技,2017(04):131-132.
[2]张波,张学敏,邵书山,马念杰,程俊男,张东旭.电动遥控绿篱修剪机的设计[J].中国农机化学报,2018,39(03):19-25.
[3]刘乐. 纯电动履带式遥控绿篱机总体设计与动力学仿真[D]. 长安大学, 2019.
河北保定定兴佶地国际D区 李然 13366849872
基金项目:2021年山东省大学生创新创业训练计划项目;项目名称:新型道路无线遥控电动绿篱机(S202113320048)
