基于滑模自抗扰的电动汽车电制动系统动态负载模拟
2021-10-23曾利奎
曾利奎
(重庆工商职业学院,重庆 401548)
0 引言
在社会经济和城市建设发展水平持续上升的背景下,面对能源污染和环境污染等问题带来的不良影响,汽车行业在革新发展中将目光集中到了研发新能源上。相比传统意义上的燃油汽车,电动汽车的电制动系统可以和摩擦制动系统达成制动需求。在正常运行条件下,利用电机再生制动回收少许车辆动能,电制动系统的动力距响应也能快速且准确的管控,尤其是在极端运行条件下,能全面提升汽车运行的经济性和安全性。
1 电动汽车电制动系统的原理分析
现如今,针对电动汽车制动系统的研发提出了一项新技术,原本的制动系统需要驾驶员控制踏板,并与真空助力器连接在一起,其主要用来释放驾驶员施加给踏板的力,并且会促使主泵活塞实施制动压力。同时,制动分泵将会经过活塞制动后,促使制动片加紧制动盘,而后得到制动力。而在研制电动汽车时,在这一基础上又增加了制动能量回收,且其可以被储存到蓄电池当中,以此得到更多的驱动能量。另外,制动系统也会产生制动力矩,促使电动机尽快停止没有价值的惯性运动,这一过程也被叫做再生制动。因此,驾驶员在松开油门之后,就会发现汽车运行速度可以快速下降,而就算不踩刹车也不需要担心速度问题。结合当前市场建设发展趋势分析可知,这种全新的制动系统电子化技术时未来汽车行业建设革新关注的焦点,不管是传统内燃机还是电动车都将由此产生翻天覆地的变化[1]。
2 背景介绍
国内外科研学者在研究电动汽车电制动系统时,要想利用有关制动控制算法,必须要先进行大规模的测试和标定。其中台架测试作为整体技术开发研究的关键环节,在实践应用中具有成本低、时间短等优势,但这种模式必须要保障加载装置道路负载模拟的精度,因此在实践操作时必须要准确展现实际运行状态下的电制动系统工作情况。例如,有专家学者提出运用MATLAB系统的识别工具箱,离线辨别台架转速闭环控制系统的传递函数,以及频域分析的相应特征,而后提出相应的补偿算法。同时,还有学者在探讨时提出,为了解决模式切换期间动态机械负载模拟出现过多问题,可以利用LQR和SMC有效结合的加载方式进行操作,这样能有效提升负载模拟的精准度[2]。
3 系统模型
本文在研究时,要先熟悉与研究有关的各类模型,分别涉及到:第一,车辆动力学。结合下图1分析可知,其作为前驱集中式电动汽车电制动系统的具体构成,其中车用电机属于感应电机,此时要忽略系统两边的差异,电制动力矩将会通过变速器、差速器以及左右半轴匀速的传递到车轮的位置,在电机参与汽车制动的条件下,电机输出轴和差速器之间的动力学方程为,其中代表电机的转矩,代表半轴的转矩,代表总传动的速度比,而表示电机的输出轴转角,代表电机阻尼系数,代表电机到差速器之间的等效惯量,且可以用公式来表示。其中分别代表电机、减速器的输入轴、中间轴以及输出轴、差速器、半轴转动惯量;第二,台架动力学。这一模型是由车用电机和测功机刚性共轴连接的。俺咋后车用电机和测功机的轴向分析,选择顺时针方向代表汽车用电机转速和转距的正方向,那么逆时针代表测功机转速和转距的正方向。此时动力学方程公式如下所示,其中和代表测功机的转动惯量、摩擦因数,表示测功机的转角,代表测功机的转矩,以及和分别为模型不明确的部分;第三,感应电机数学。不管是车用电机还是加载测功机都属于感应电机,轴坐标下的感应电机的电压、电流以及磁链和转距的方程可以表示为
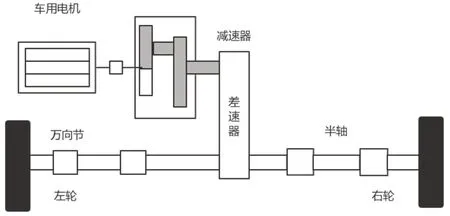
图1 车辆动力学构成图
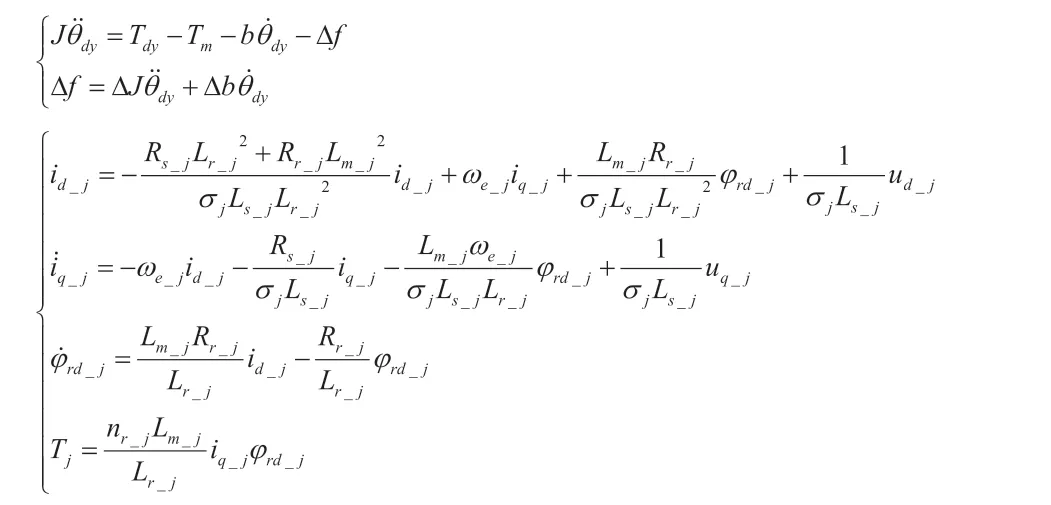

表1 关键参数表
4 测试研究
一方面,正常制动。在这一条件下,电制动系统可以利用回馈制动力距和液压制动力来满足实际制动需求,最大的电机制动力矩策略也是现如今最为常见的分配形式,主要根据汽车状态来准确评估电机所需的最大动力距,并计算符合制动需求所需的前轮制动力矩,而后分别确定回馈制动力矩和液压制动力矩的命令数值与期望数值。这种方式最大的优势在于可以充分利用电机制动力,且可以获取更多有效的汽车动能。在正常制动中,将会影响整体汽车运行能量的经济性和舒适感。因此,为了验证制动控制算法的科学性,测试台架必须要准确模拟内部系统的动态负载,尤其是模式切换的高动态过程[3];
另一方面,防抱死制动。结合如下图2所示的控制方法进行分析,防抱死制动在被触发以后,通过明确路面附着来分析现如今路面所需的最大制动力。同时点制动系统将会在滑移率PID闭环管控下获取制动力矩,动态调整汽车车轮滑移率需要具备参考数值,且在电机无法提供充足制动力的情况下,液压制动系统必须要进行辅助。这一制动系统将影响着整个汽车的安全性和舒适度,因此为了保障后续台架测试具有科学性和有效性,负载模拟算法必须要精准模拟防抱死控制下的点制动系统的动态负载,尤其是对那些防抱死控制性能不高,滑移率变化频率过高的情况而言[4]。
5 研究分析与结语
5.1 测试方案
利用如下图3所示的方案进行模拟分析,需要利用制动控制单元实时监管仿真平台计算的车辆运行情况,并按照制动控制算法,管控车用电机对汽车产生的制动。同时,负载模拟控制单元控制台架转速必须要进行实时跟踪,明确仿真平台的目标数值。随着误差的降低,负载模拟性能将会越来越高,且台架测试也会变得更加有效[5]。
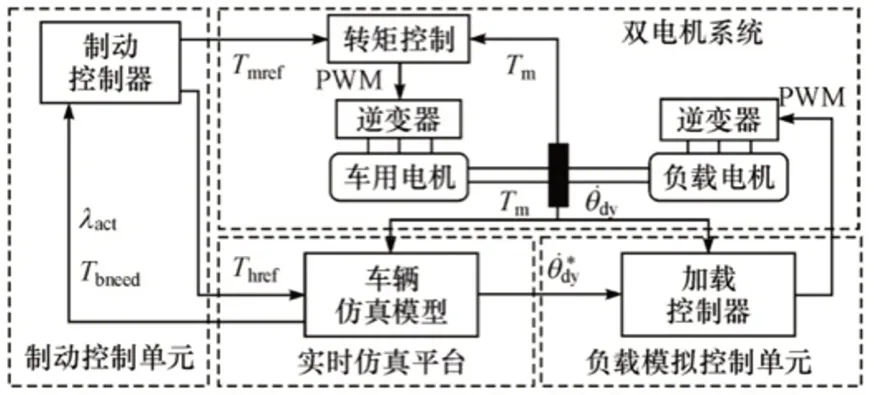
图3 负载模拟方案结构图
5.2 结论分析
第一,构建融合感应电机模型的车和台架机电一体化模型,能直观展现整体汽车动力学控制台架测试过程中,测功机、电机以及汽车的工作性能,可以用于未来行业进行车辆的动力学或测功机加载控制算法等方面的开发利用;第二,不管是传动系弹性还是齿隙特性,在动态运行期间很容易出现传递力矩波动过大的现象,这样很容易导致电制动系统在运动期间出现高频震荡。为了有效模仿相关高动态非线性负载,所选模拟算法必须要具备抗干扰性和动态性,同时要保障整体管控的准确性;第三,根据完全电模拟的负载模型拓扑和速度跟踪控制的负载模拟方式分析,运用自适应模糊滑模自抗干扰的测功机加载控制算法,同时对比研究传统IP控制、MPC以及ADRC,可以由此得到更为精准的模拟结果。在SMMULINK中实施制动模式切换和防抱死制动控制台架测试进行模拟仿真研究工作,最终可以得到如下结果:第一,在切换制动模式时,负载模拟量化的数据误差相比上述其他三种模式可以分别下降77.8%、65.9%以及46.6%;第二,相应防抱死制动过程的模拟量化误差会分别下降57.7%,58.8%以及43.0%;第三,负载模拟误差将会越来越低。由此可知,本文研究基于滑模自抗扰的模拟方式,能有效保障台架测试的准确性和有效性,而且可以为后续电动汽车的科研项目提供有效依据。
6 结语
综上所述,电制动系统作为未来电动汽车行业革新探索的重要内容,企业和科研人员必须要在整合当前应用经验的基础上,根据社会经济和科技技术革新速度,不断优化相关研究项目,多学习和借鉴国外的优秀案例,只有这样才能从中得出更为完善的制动系统。同时,还要加强专业人才的培养力度,注重从电动汽车未来发展趋势入手,培养更多高素质高技能的优秀人才,以此在积极参与相关科研项目活动的同时,提出更多具有研究价值的技术内容。
