水空两用无人机的设计与控制系统研究
2021-10-23文伟邓昌胜樊志纬吕雯昕王纯贤吴炜
文伟,邓昌胜,樊志纬,吕雯昕,王纯贤,吴炜
(合肥工业大学,安徽 合肥 230009)
0 引言
水空两用无人机是一种集空中飞行与水下潜行功能于一体的创新型无人机,可执行警戒、侦测、突防等军事任务和大坝检修、水质检测、航拍、潜拍等民事任务,具有较高的灵活性,有重要的军用与民用价值[1-3]。通过对水空两用无人机的飞行控制系统、水下浮沉系统与信号传输系统等进行整体设计,保证水空两用无人机在复杂的多介质领域中平稳运行。同时加入超声波自主避障、GPS定点、航线规划等功能设计。无人机全机身防水,具有良好的抗压、抗强水流特性。
1 水空两用无人机整体设计
水空两用无人机以STM32F407ZET6单片机为控制芯片,主要由控制模块、动力模块、视频传输模块、水下浮沉模块、信号传输模块等主要模块组成。其中控制模块主要由传感器、主控芯片、执行部分与无线通信部分组成,用于控制无人机在空中与水中的工作姿态;动力模块主要由电调、电动机、螺旋桨与锂电池等组成,为无人机提供动力;视频传输模块指图像传输系统,可以远程实时传输摄像机图像;浮沉模块主要由真空舱、水气两用泵和电磁阀等组成,控制无人机在水中的上浮和下沉;信号传输模块主要由遥控器和接收模块构成,接收模块接收由遥控器发来的指令,并将指令发送给控制模块。无人机整体结构如图1所示。

图1 水空两用无人机整体设计
2 水空两用无人机工作原理
2.1 空中飞行原理
水空两用无人机空中飞行模式基于四旋翼无人机飞行原理,使用四组电机和螺旋桨作为驱动力,四个电机机臂互为90°夹角,四组电机的轴距相等。两组电机和螺旋桨顺时针旋转,两组逆时针旋转,产生的扭矩互相抵消。通过对电机转速进行调控,控制无人机的升力、扭矩、水平分力等,以完成上升、悬停、下降、偏航、前后与左右运动[4]。
2.2 水下浮沉结构浮沉原理
水空两用无人机在水中运行时,需要通过电磁阀、真空泵、真空舱组成的浮沉系统来实现上浮和下沉,并控制无人机的运行状态。水空两用无人机的浮沉模块是基于潜水艇的浮沉原理设计的,具有体积小、耗能小、浮沉易于实现等优点。当无人机浮于水面上时,电磁阀打开,水气两用泵向真空舱中注水,使无人机悬浮于水中,关闭电磁阀。若要实现下潜,打开电磁阀并使真空泵运行,通过调节向真空舱中的注水量,实时控制无人机的下潜深度;若要实现上浮,关闭电磁阀并使真空泵运行,将真空舱内水抽出,使无人机上浮至水面,控制浮沉的原理图如图2所示。
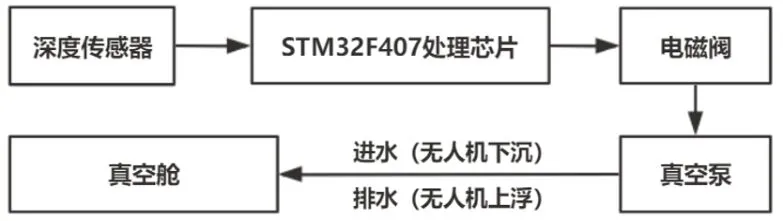
图2 浮沉原理
水空两用无人机在飞行模式下,使用的是尺寸较大的桨叶;在潜水模式下为了减小桨叶水下运行的阻力,需要更换尺寸较小的桨叶。无人机通过浮沉系统实现浮沉功能的同时,可以结合电机的低速旋转,提高浮沉系统的工作效率。
3 控制系统硬件与算法设计
3.1 控制系统硬件设计
飞行控制系统硬件设计图如图3所示。采用STM32F407ZET6为主控芯片,其主频高达168MHz,片内封装大小为512KB的Flash,自带DSP指令和浮点处理单元,有利于提高无人机姿态数据的计算速度。选用姿态角传感器ICM 20602(含加速度计与陀螺仪)、QMC5883磁力计、MS5611气压计、温度传感器等。硬件电路预留的USART接口可用于外接超声波、激光、光流等传感器,通过传感器测距,实现自主避障与定点悬停等功能。控制硬件电路设有14个PWM输入输出接口,可用于遥控器PWM信号的输入与电子调速器、舵机等PWM控制信号的输出。另外,配置1.3寸OLED屏幕,通过IIC与主控芯片通信,可用于显示无人机工作状态、电压、控制信号连接强度等信息。

图3 控制系统硬件设计
3.2 控制系统算法设计
水空两用无人机的控制系统需要控制空中飞行姿态、飞行高度、潜水姿态、下潜深度等,其中飞行姿态与水下运动控制为整个控制系统的核心。采用串级PID控制器实现稳定的飞行控制与下潜深度控制,控制器原理图如图4所示。其中内环、外环中的PID控制器均采用离散增量PID算法,内环PID控制器进行角速度控制,外环PID控制器进行角度控制[5]。离散增量PID算法公式为:

图4 水空两用无人机串级PID控制

公式中Kp、Ki、Kd分别为比例、积分、微分系数;n为采样序号,n=0,1,2....;U(n)为第n次采样时的输出;e(n)和e(n-1)为第n次和第(n-1)次采样时的输入误差;Ti为积分时间常数;Td为微分时间常数;T为采样周期。
4 实物平台实验
4.1 实物样机制作
根据总体设计,使用Solid Works建模软件进行3维图像建模,采用3D打印核心舱、真空舱等非标准件。无刷电机、桨叶、电子调速器等元件根据设计要求进行选配。最终完成水空两用无人机的实物样机,如图5所示。使用软件Proteus进行飞行控制系统电路硬件设计并进行PCB打板,基于STM32F407单片机,使用软件Keil uvison5进行飞行控制系统程序设计。

图5 水空两用无人机实物样机
4.2 空中飞行实验
在无人机飞行测试场地,对水空两用无人机飞行模式下的控制系统进行实验,如图6所示,控制无人机上升到空中并定点悬停一段时间。实验结果表明加入磁力计校准后,无人机不会因为加速度计与陀螺仪的累计误差而产生温度漂移与零点漂移。并且无人机的前后、左右运动均正常。多次测试表明,水空两用无人机控制系统在飞行模式下工作状况良好。

图6 水空两用无人机飞行实验
4.3 水下密封性实验
水空两用无人机在潜水模式下的气密性对于保护电路系统至关重要。在正式下水前需进行严格的气密性测试,着重检查螺纹连接处、舱体内部、两舱连接处等,在舱体内部放置水检测试纸,若舱体漏水则试纸变色。将无人机置于水池中,使水没过无人机,如图7所示,放置一段时间后,再打开舱体盖,检查试纸是否变色。在浅水池、深水池中进行的多次实验表明,无人机舱体气密性良好,能够满足设计需求。
4.4 水下运动实验
经过气密性实验后,在深水池中进行水空两用无人机的水下运动实验。通过控制电磁阀、真空泵,控制真空舱的进水量、排水量,结合低速旋转的电机,实现水下的浮沉运动,如图8所示。实验结果表明,无人机切换到潜水模式后,能够稳定实现浮沉运动。

图8 水下浮沉实验
5 结语
本研究设计了一种水空两用无人机,建立了几何模型并进行了有限元分析,建立了水空两用无人机的串级PID控制系统模型,完成了飞行、潜水两种模式的控制系统程序设计,并最终完成了实物样机的制作与实验。实验表明,这种设计方案可以使无人机集飞行功能与潜水功能于一体,可应用于多介质的复杂环境。本设计为水空两栖无人机的研究提供了一种思路,具有一定的参考价值。但是,该设计对于无人机跨介质与水下运动的研究还有许多不足,下一步将围绕这些问题展开。
