Android 手机路径规划系统的研究与实现
2021-10-23马志鹏沈显庆孙启智陈男
马志鹏,沈显庆,孙启智,陈男
(黑龙江科技大学 电气与控制工程学院,黑龙江哈尔滨,150022)
0 引言
近年来随着传感器技术、自动化技术等相关学科的高速发展,移动机器人技术不断提升。智能小车作为移动机器人的一种,其研究与开发具有重要的意义[1]。目前对智能小车的研究大多停留在基本功能层面,对路径规划等涉及较少,在路径规划研究中,全局路径规划是移动机器人需要具备的基本能力之一,其要求根据给定地图等先验知识,在某些约束条件下,规划出一条从起点到终点的无碰撞路径[2]。基于以上研究现状,笔者基于Android 客户端开发平台,设计了一款路径规划的智能小车控制系统,重点对环境感知及建模、路径决策、WiFi 无线传输等方面进行研究。通过测试,实现了智能小车的路径规划功能。
1 系统硬件结构设计
智能小车控制系统硬件整体结构分为三个部分,分别为视觉传感器、上位机及下位机。视觉传感器选用小蚁智能摄像机来采集周围环境信息;上位机即Android 终端,主要包括环境感知模块、建模模块及行为决策模块,用来运行图像处理、路径规划等程序,是整个控制系统的核心部分;下位机即智能小车,主要包括微处理器模块、电机驱动模块、电源模块及智能WiFi 模块。系统硬件结构图如图1 所示。
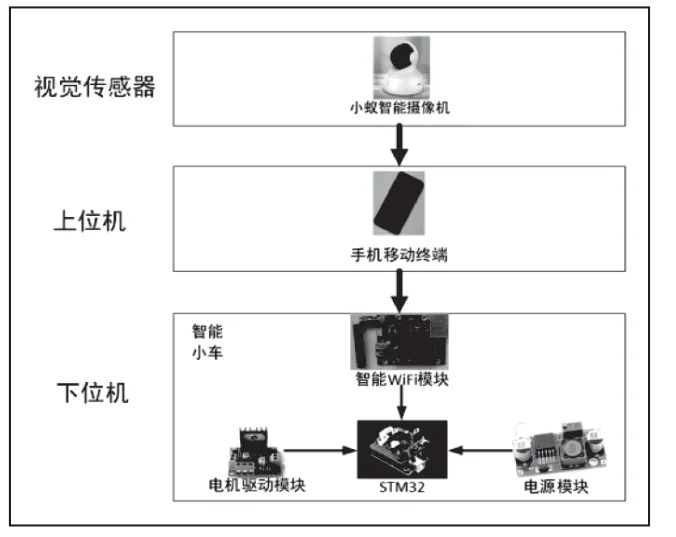
图1 系统硬件结构图
2 Android 客户端应用程序设计
2.1 环境感知与建模
环境感知是智能小车控制系统中的重要组成部分,该模块主要接收视觉传感器的信息。环境感知功能主要依靠视觉系统来实现,其主要由镜头、CCD、图像卡、处理器等构成。本次基于Android 客户端的智能小车控制系统采用已知环境的全局路径规划方法因,此将视觉系统布置于屋顶。首先,通过摄像机获取小车所处的环境信息,将信号送入视觉系统的图像卡并进行RGB 表色处理。然后,通过色彩空间转换将图像由RGB 色彩空间转换至HIS 色彩空间,并与传统的指定阈值分割法结合实现图像的二值化。最后,对二值图像进行闭操作,去除邻近边缘线间的空白,对重合图像进行合并。为实现智能小车在障碍物环境下的自主运动,还需对环境感知所得到的信息建模,本文选用格栅法进行环境建模,其具有简单、直观等优点[3]。
2.2 基于天牛群算法的行为决策
行为决策模块是智能小车控制系统的核心,其将环境感知和环境建模模块所得到的全局地图信息进行分析,为智能小车找到一条符合某种规则的最优路径,从而实现智能小车的全局路径规划。本文使用天牛群算法(BSO)对智能小车控制系统的全局路径规划进行研究,BSO 算法参考粒子群算法的基本原理,将天牛觅食和鸟群觅食的行为特征相结合,在粒子群算法中引入天牛须搜索的概念提出[4]。该算法具有建模简单、计算量小、收敛速度快等优点。
3 Android 客户端与小车通信实现
本文选用基于TCP 协议的WiFi 通信作为Android 客户端与智能小车的通信方式,WiFi 网络中的数据传输借助于Socket 套接字来实现,应用程序利用套接字发送网络请求或者对网络请求做出应答[5]。本次设计中,端口号为2001,IP地址为192.168.1.1。智能小车系统工作时,Android 客户端通过WiFi 与摄像头和小车之间进行数据通信[6],其具体通信协议如表1 所示。
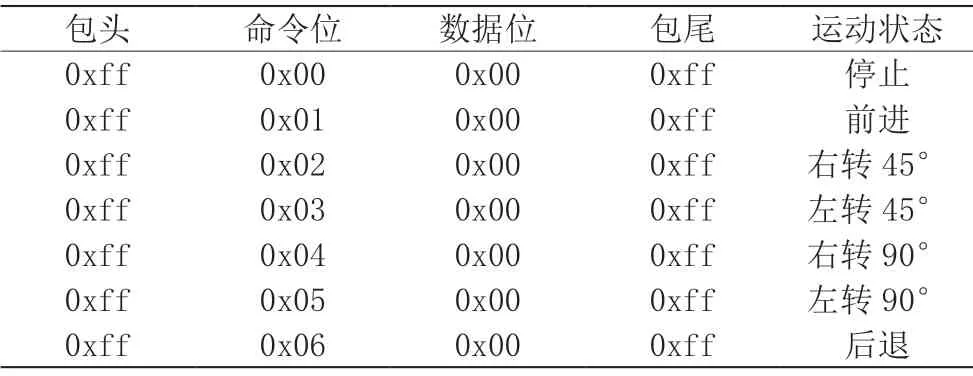
表1 Android 客户端与智能小车通信协议
4 路径规划模式程序设计
Android 客户端路径规划程序设计流程如下:
(1)初始化STM32,设置其串口波特率与WiFi 模块默认的一致,均为9600bps,同时设置数据位、校验位和停止位等,监听串口是否有数据,若没有,则继续等待。
(2)建立客户端套接字Socket,使用WiFi 模块的IP地址和2001 端口与Android 客户端建立WiFi 连接,若Android 手机未打开WiFi,则提醒用户开启WiFi。
(3)Android 客户端接收小蚁摄像机采集的环境信息,将图像发送至环境感知模块对其进行分析及处理,将处理好的二值图像发送至环境建模模块进行格栅法建模,并在此基础上使用天牛群算法进行智能小车的路径规划。
(4)控制指令通过无线通信传输到智能WiFi 模块,再经过串口转发至STM32 最小系统板。其接收到控制指令后,使用switch 语句对控制指令进行解析,并按照收到的控制指令对智能小车进行控制,从而实现智能小车的全局路径规划。
5 实际路径规划测试
以天牛群算法得出的规划路径为对象进行测试,截取路径图和智能小车实际运行图如图2 和图3 所示。
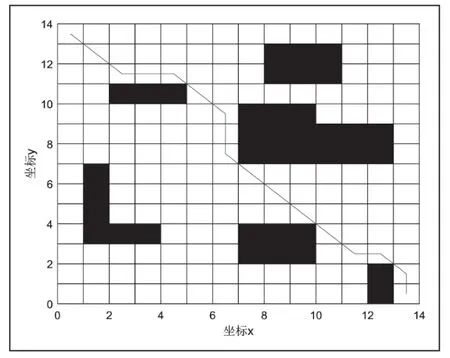
图2 路径规划测试图

图3 小车实际运行图
通过对智能小车实际路径规划进行测试,可以看出Android 客户端应用程序对于智能小车路径规划的正确性及合理性,达到了预期的控制要求。
6 结束语
本文基于Android 客户端开发平台,设计了一款智能小车路径规划系统。重点对环境感知、环境建模、路径决策、WiFi 无线通信等方面进行研究,利用Matlab 软件进行仿真并通过实验验证了本作品的准确性和可行性,后期可以与目前流行的智能家居、物联网技术相结合,应用领域广阔,具有重要的现实意义。
