轨道巡航机器人即时弹射系统设计
2021-10-22杨之远覃一飞冷春涛
杨之远 覃一飞 冷春涛
摘要:交龙队轨道巡航机器人的两端弹射系统在RoboMaster2019比赛中虽然表现良好,但该机器人承担着保护基地安全的动态防卫兼攻击职能,因此其弹射系统的设计迭代就显得非常重要,在提高系统机动反应能力时还要求降低能耗,发挥轨道巡航机器人的最大竞技优势。本文论述了轨道巡航机器人弹射系统的原理、即时弹射系统的设计以及其竞技性能的测试。
关键词:即时弹射系统 轨道巡航 稳定性 储能系统
Abstract:Although the ejection system at both ends of the Jiaolong team's orbital cruise robot performed well in the robomaster 2019 competition,the robot undertakes the dynamic defense and attack function of protecting the safety of the base. Therefore,the design iteration of its ejection system is very important. It is also required to reduce energy consumption and give full play to the greatest competitive advantage of the orbital cruise robot when improving the mobile response ability of the system. This paper discusses the principle of the ejection system of the orbital cruise robot,the design of the real-time ejection system and the test of its competitive performance.
Key words:Real Time Ejection System Orbit Cruise Stability Energy Storage System
一、背景
RoboMaster比赛中轨道巡航机器人在空中轨道段上进行高速移动,通过自身弹射系统和弹丸发射能力保护己方基地安全。弹射系统可以使机器人在轨道两端循环移动,其速度大小的设计决定着端点滞留受袭的概率,即机器人在轨道两端的存活率;另外如果轨道巡航机器人能够做到轨道区间内任意点具备随机彈射能力,将使其成为极难被击杀并兼攻击力的炮台。因此轨道巡航机器人弹射系统的优化设计非常重要,该系统从属于机器人的顶部底盘系统。
交龙队2019代轨道巡航机器人的弹射系统包括弹簧储能系统和撞柱检测涡流传感器两部分,顶盘两侧的弹射系统以弹簧为主体,在不开启弹射系统时顶盘系统阻力均匀,使机器人在轨道两侧换向时没有任何滞留时间,具有良好的运动性能,有效躲避对方弹丸伤害,其反弹机构由碳管、弹簧、碰撞板与电感式接近开关等构成,机器人在撞击轨道两侧柱子的瞬间,柱子挤压碰撞板并压缩弹簧,将机器人反向弹回;同时碰撞板上的电感式接近开关感应到柱子后,顶盘主动轮电机反转,使机器人迅速换向运动。但该弹射系统的设计只能在轨道两个端点进行弹射,在两端只能开启匀加速或匀减速运动,具有一定的局限性,如图1所示。
该系统的碳管参数为外径12mm-内径8mm-长480mm,能在碳管限位板的限制下沿轴向滑动。弹簧参数为外径20mm,线径1.5mm,长度110mm,弹簧刚度过大会对机器人造成过冲击,且损耗能量;若其刚度过小则压缩行程过大,云台有撞上柱子的风险。由于顶盘系统快速运行,选用PR18-8DN电感式接近开关来检测柱子。
为了改善轨道巡航机器人的运动模式,扩大弹射系统范围,并结合2020年度赛季规则和竞技需求,2020版轨道巡航机器人弹射系统设计提出了以下设计目标:
1.设计轨道巡航系统任意点弹射功能,最大化保证功率使用,功率曲线保持在 30w 以下波动;
2.设计弹射锁死机构可以任意情况下控制开合,且闭合时不产生滑动摩擦,保证弹射系统可以匀速运动。
3.弹射系统可以在任意匀速段开启和转向,挂挡期间不开启电机。
二、轨道巡航机器人弹射系统设计方案
1、轨道巡航弹射系统架构
轨道巡航弹射系统整体架构如图2所示。通过顶盘车架两侧拉簧及滑轨固定刹车系统,在刹车系统工作时,使得拉簧完成储能和释放的过程。
2、刹车系统机械原理
刹车系统设计利用了摩擦角原理。即当物体处于滑动的临界状态时,静摩擦力FS达到最大值Fmax,此时FR 与支持力FN 的夹角也最大,此时的φm 称为摩擦角。
通过摩擦角原理可知,当施力方向在摩擦角内时,无论力多大都可以保证物体静止。
3、刹车抱死系统的设计
刹车抱死系统的设计主要包括刹车片、刹车臂以及刹车控制装置。2019版没有该设计,首先考虑采用舵机进行刹车控制,即舵机通过一个柔性扭簧连接到刹车片,在需要刹车的时候,摩擦片直接接触到轨道底部,达到刹车的效果。考虑舵机与刹车片采用柔性连接,是因为这种连接方式不会对舵机产生损伤。刹车臂的控制则是纯机械控制完成。刹车臂上装有两侧的扭簧,用于刹车脱开后的快速回正,同时在一侧装有阻尼器,通过调节阻尼器内的油量来控制阻尼大小,以达到最佳状态。虽然刚开始效果不错,但是机械调PID的操作非常复杂且难以调平,随着使用频率的增加,纯机械刹车渐渐产生很多问题,容易出现某个机构参数稍微差一点就得重新凹结构的情况,总的来说不理想。
经过反复思考决定直接使用2006电机控制刹车臂实现自锁。这一更改省去了很多复杂的弹簧、扭簧以及阻尼器,使得整体结构更加紧凑简单,稳定性更好,成功率更高。在机械设计上利用摩擦角原理将刹车片通过电机和悬臂杆连接,使得刹车机构在需要的时候可以直接和轨道夹死,形成一个小于摩擦角的角度,从而达到瞬间锁死的效果(图4)。
4、储能系统设计
2019版储能系统采用弹簧机构,并用伸缩杆作为方向引导,结构较复杂;新设计改用拉簧进行弹性储能,两侧拉簧和两侧留出的安装孔相连,利用两边的初始力拉紧,取消了伸缩杆,简化了部分结构。刹车机构和拉簧连接可以带动车架整体进行机械能的积累。
第一种方案设计采用的是单侧双拉簧,在拉簧被挤压的时候,被挤压侧将会像连杆一样弯曲,使得车体在刹车状态持续更长的距离,尽可能增加储能。但是根据实际测试来看,这样设计的效果并不好。首先,每次弹射都会引发巨大的噪音,主要原因是“连杆”收縮的时候由于重力作用会撞在轨道上,从而损失了较多机械能;其次,拉簧连杆系统的自由度较多,容易在连杆收缩的时候出现拉簧脱开的情况,导致机构无法使用,而且使用时间越长出现这种情况的频率越高。
由于上述两个比较致命的因素,我们设计第二种方案,使用弹性系数更小的拉簧,即线径小,直径大,圈数多的拉簧。最初我们使用的是线径2mm外径18mm长度80mm的拉簧,经过测试以后拉簧的主要参数优化方案为线径2mm外径18mm长度90mm(图5)。
5、即时弹射系统设计
2020版即时弹射系统设计包括刹车抱死系统和拉簧储能系统两部分,刹车抱死系统包括刹车片的选型和刹车控制,刹车片必须具备耐磨、高摩擦系数、易于固定和长寿命等特点,刹车控制通过控制电机的正反转和刹车时刻来储存和再利用动能;储能系统决定了弹射系统每一次弹射的能源利用率,在弹射的过程起到了决定性的作用,如果储能系统储存能力差,比如在弹射过程中产生大量振动和撞击等动作,将大大降低回弹速度从而使得弹射效果大打折扣。
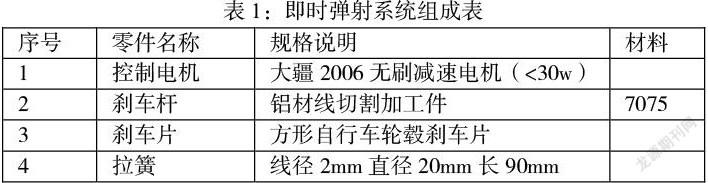
即时弹射系统经过上述优化设计和测试后,最后的方案如下表1:
三、轨道巡航机器人弹射系统性能测试
1、测试平台搭建及基本原理测试
测试的主要模块是弹射机构,先后通过亚克力、打印件、自制线切割件进行了简单的功能性测试,达到了一定的成果(图6、7)。
构建了测试用顶盘,和比较基本的原理性测试用刹车。整体上通过手动的控制,可以发现基本功能是可以保证的,但是由于打印件比较脆弱,故并没有用非常大的力进行测试,只能说在原理上可行。
2、即时刹车系统测试
实验评估指标主要包括:机器人在轨道上的平均往返时间,变向加速度,直道与弯道上的匀速滑动阻力,全速运动瞬间断电后的自由滑行距离等。
3、储能系统的测试
储能系统主要由拉簧组成,先后进行过多次测试。其中线径-直径-长为2mm-18mm-80mm拉簧方案经过长期测试,在120分钟后出现了严重范性形变,大于120分钟后一侧弹簧断裂,如图10。线径-直径-长为2mm-20mm-100mm的拉簧方案整体上无严重的畸变,但是能量储存不理想。目前优化方案采用线径-直径-长为2mm-20mm-90mm的拉簧,电机功率曲线小于30W。
经过测试表明轨道巡航弹射系统的设计达到了以下三个目标,实现轨道巡航的即时弹射,最大化保证功率使用,功率曲线不超30w上下波动;弹射系统可以在任意匀速段开启和转向,挂挡期间不运作电机;弹射系统刹车机构可以任意情况下控制开合,且闭合时不产生滑动摩擦。但在部分细节上仍有一定的问题,比如拉簧储能不够充分,每次弹射都存在一次轨道巡航整车的晃动,发现每次弹射会有拉簧松开现象,另外弹射系统程序偶尔会出现零点问题。
四、轨道巡航机器人即时弹射系统改进与展望
轨道巡航机器人即时弹射系统经过迭代设计,尽管取得了较多优点,但还存在控制程序偶尔失效的缺陷,拉簧储能不够充裕等方面。因此下一步可以优选拉簧参数,结构上设计更长的拉簧行程,通过仿真分析降低整车重量等方面可以进行更多的迭代,提高系统的稳定性和可靠性以及实战性。
参考文献
[1]机械工程师手册编委会编:《机械工程师手册》,第3版,机械工业出版社,2007
[2]约瑟夫E.希格利:《机械工程设计》,机械工业出版社,2008年3月
[3]徐柏艮:《一种自行车刹车制动机构》[P].中国专利:CN201863971U,2011.06.15
[4]吴芬主编;《SolidWorks设计与仿真一体化教程》[M].华中科技大学出版社,2016
[5]郑世界:《基于solidworks下的巴哈赛车轻量化车架设计》[J].新型工业化,2019,第9卷(7):89-92
[6]陈财根,褚春蛟:《一种带J型倒角的摩擦片》[P].中国专利:CN211599364U,2020.09.29
[7]赵冰清,赵彬勇:《一种便于固定的自行车刹车片》[P].中国专利:CN212297354U,2021.01.05
[8]胡磊磊,李锦,仇志凌,刘定坤.城市轨道交通再生制动能量回馈装置研究[J].世界轨道交通,2016,(7):48-49[9]杜公民.适用干高速列车的电动机械式弹簧储能制动器[J].陕西煤炭,1993,(2):62-63
