D-S证据理论在小型空地无人集群战场目标识别中的运用*
2021-10-21杨君刚刘存涛赵文栋
杨 华,杨君刚,刘存涛,赵文栋
(1.国防科技大学信息通信学院,陕西 西安 710106;2.陆军工程大学,江苏 南京 210001)
小型空地无人平台具有成本较低、机动灵活、隐蔽性强等特点,且协同运用时能够发挥速度、负载、续航、通信、视野的互补优势,在战场态势感知等领域具有广阔的应用前景[1]。未来,基于空地无人集群协同侦察的作战样式将成为主流[2]。在集群执行侦察任务的过程中,为了提高目标检测和识别的成功率,需要融合集群内同构/异构侦察载荷探测的多源信息,但是由于内外部因素的制约各侦察单元所提供的信息通常是不完备、不精确甚至是相互矛盾的。融合这些多源不确定信息是形成和发挥集群协同侦察优势的基础,融合效果的好坏直接影响控制、打击、毁伤评估等后续任务。目前,常用于目标分类、识别的信息融合方法可分为三大类:基于物理模型、特征推理(如贝叶斯推理、D-S证据理论、聚类算法、选举法等)、认知模型(如逻辑模板、基于知识的专家系统、人工神经网络等)的方法[3]。其中,D-S证据理论[4-5]是基于特征推理方法的典型代表,凭借相对完备的理论基础和良好的工程实用性得到了广泛的关注[6]。但是,经典的Dempster(DST)组合规则在面对低置信度、高冲突的证据组合时,难以取得理想的效果。考虑实际作战中无人集群面临更恶劣的内外部不确定性因素,加剧了冲突证据出现的可能性,因此深入研究适用于无人集群的冲突证据组合方法具有重要的现实意义和应用价值。
目前学术界对证据冲突的原因尚未达成共识,一般认为冲突主要源于组合规则的合理性、辨识框架的完备性以及证据源的可信性[7]。相应的解决策略主要分为两大类:基于修改证据组合规则和证据源的方法等。对于第一类方法,主要的研究思路是冲突的管理问题,即冲突应该以何种比例怎样在全局或者局部中分配,如文献[8-11]。这些改进方法虽然取得了不错的效果,但通常使证据组合丧失交换律、结合律的数学特性,在认知方面还存在一些困难。文献[12-15]基于不完备辨识框架的假设展开研究,然而相关方法更多地从理论层面提供了一些良好思路,尚未成熟地运用于工程实践。对于第二类方法,主要的研究思路是证据的可信性差异问题,即认为冲突源于某些证据的不可靠,需要设计某种折扣系数进行修正,再利用DST组合规则进行合成,如基于证据间支持度[16-20]、价值量[21]、信息熵[22]等计算折扣系数的方法。该类方法能够保留DST组合规则的数学特性,且不排斥辨识框架不完备的假设,m(Θ)≠0保留了可能出现的未知命题;但现有的改进方法很少考虑不同目标识别主体(传感器)的可信性问题,同时没有对证据组合结果的精炼调整。综上所述,两种解决策略各有优劣,需要结合具体的应用背景而定,我们认为第二类策略在实际运用中更符合认知,但需要进行适用性改进。
本文提出了一种基于复合折扣因子修正初始证据的方法,并考虑了结果的精炼。基本思路为:首先,利用参考证据和比较证据的灰色关联度计算目标识别主体的相对可信性,利用证据间的距离计算证据间的支持程度;然后,通过两者复合折扣因子修正初始证据,并采用DST组合规则进行第一次合成;最后,将组合结果作为一条新证据与复合折扣因子最大值所对应的证据进行组合,实现对首次组合结果的精炼。同时,本文对该方法在无人集群战场目标识别中的运用进行了分析。具体为:首先,对空地无人集群协同目标识别的背景进行了介绍;然后,在对D-S证据理论的具体应用方法进行分析的基础上给出了决策依据;最后,通过仿真算例对应用效果进行了分析,验证了本文所提算法的有效性。
1 改进的证据组合方法
1.1 算法的主要思想
本算法主要分为初次合成和精炼调整两个阶段。
初次合成阶段,主要完成不同目标识别主体证据折扣系数计算,并通过DST证据组合规则进行合成。现有的基于证据间支持度的折扣系数计算方法[16-19],仅通过计算证据间距离差异来确定各证据被其他证据支持的程度,将导致一种潜在的风险:在含有冲突的一组证据中,若大多数证据均由可信性相近且较低的目标识别主体产生,则由这些证据之间的相互支持,可能会导致对这些证据赋予较大的折扣系数,而由高可信性目标识别主体所产生的证据被分配较小的折扣系数,进而可能导致识别结果错误,算法失效。针对该问题,本文结合无人平台应用特点,提出了一种高可信性目标识别主体确定方法,以保证高可信性目标识别主体的证据被充分尊重。对于无人平台来说,影响其侦察信息可信性的因素主要包括人员因素、机械因素、环境因素、管理因素(简称“人机环管”因素)等,层次结构模型如图1所示。直接量化所有因素的影响使得问题求解变得非常复杂,不便于实现,为此给出了一种定性与定量相结合的方法。通过统计各目标识别主体历史成功识别次数和具体应用场景,确定最高可信性目标识别主体,并以此为基准,通过灰色关联分析计算其他目标识别主体所提供的证据与基准证据的接近度,以量化各目标识别主体的相对可信性。
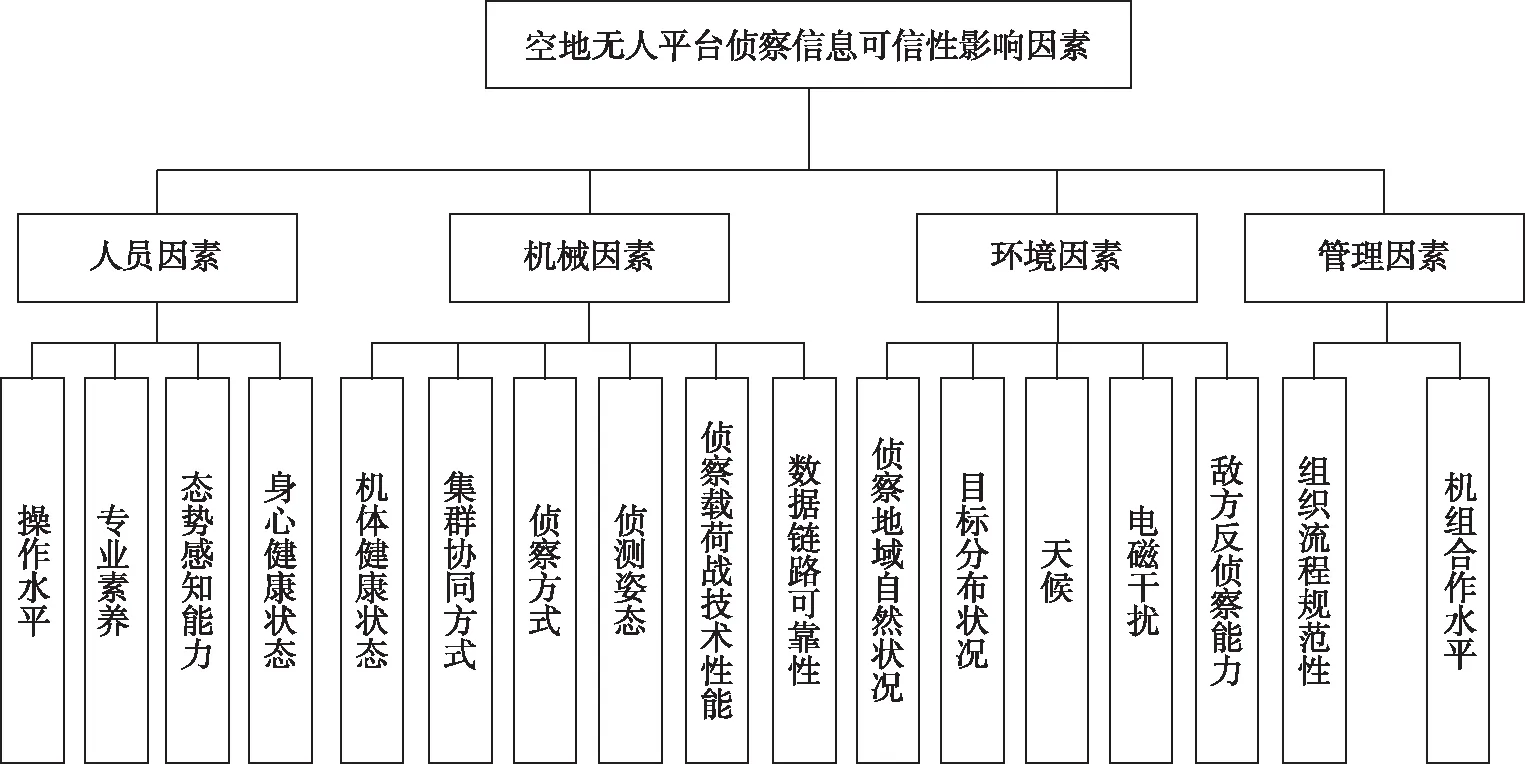
图1 影响空地无人平台侦察信息可信性的主要因素
精炼调整阶段。主要针对第一次合成结果可能会因为融入错误证据而产生结果偏差的问题,利用复合折扣因子最大值所对应的证据更接近真实情况的特点,将它与第一次合成结果进行组合,实现结果精炼,进一步提高结果的准确性。
1.2 算法形式化描述
设辨识框架为Θ={θ1,θ2,…,θN},证据e1,e2,…,ew的BPA分别为m1,m2,…,mw。e*为综合考虑各目标识别主体历史识别成功次数和当前具体应用场景后确定的最高可信性目标识别主体提供的证据,记为参考证据,基本概率分配序列如式(1)所示。
M*=[m*(A1),m*(A2),…,m*(Ak)]T
(1)

Mi=[mi(A1),mi(A2),…,mi(Ak)]T
(2)
式中,i=1,2,…,w。
通过以下步骤进行证据组合。
1)计算参考证据与比较证据的基本概率分配差值序列
设M0=μM*,其中,μ为信任调节因子,用以调节对参考证据基本概率分配序列的信任程度,物理意义为允许对所选择的目标识别主体有一定的怀疑程度,差值序列为
(3)
2)计算灰色关联系数和灰色关联度
(4)
其中,γ(m0(Ak),mi(Ak))为灰色关联系数,表示m0与mi在第Ak点的比较测度;ξ为分辨系数,通常取值为0.2~0.5[23]。灰色关联度为
(5)
式中,γ(m0,mi)反映了m0与mi的相似程度(接近度)。
3)计算目标识别主体可信性因子
(6)
其中,Rei表示综合考虑各因素后确定的各目标识别主体的相对可信性大小,作用是保证高可信性目标识别主体的证据被分配较高的权重,克服因低可信性证据相互支持而否定高可信性证据的风险。
4)计算证据之间距离
选用Jousselme距离[24]测度证据之间的差异,公式如下:
(7)
5)构造证据间支持度矩阵
R=(rij)w×w
(8)
6)计算证据间支持度因子
因R矩阵为非负对称矩阵,由矩阵基本知识可知,该矩阵存在正的最大特征根,使得其对应的特征向量V=(v1,v2,…,vw)T非负,满足RV=λV,对其中任意第l行,展开式为rl1v1+rl2v2+…+rlwvw=λvl,式中,λvl可理解为对rl1v1,rl2v2,…,rlwvw的综合,因此,将λvl作为证据e1,e2,…,ew对证据el支持度的度量[19]。证据间支持度因子为
(9)
其中,Sui表示e1,e2,…,ew对证据ei的支持程度,取值越大表示支持度越高。
7)计算复合折扣算子
(10)
其中,Wi表示证据折扣系数,它的物理意义为综合考虑了目标识别主体可信性和证据间支持程度的复合折扣算子。式中,α,β≥0为放大因子,用于调节两者的看重程度,需要根据先验知识和实际作战情况灵活设置。
8)计算初次合成结果
利用Wi对初始证据进行折扣,公式如下:
m′|i(Ak)=
(11)
利用式(12)进行组合。
(12)

9)计算精炼调整结果
将组合后结果作为一条新的证据,与ei=max{W1,W2,…,Ww}进行组合得到最终结果。该步骤的意义在于尽可能减少错误证据融入导致的组合结果偏差。
2 D-S证据理论在空地无人集群协同目标识别中的应用
在任务执行层面,空地无人集群协同目标识别,是指地面无人单元(包括履带式/轮式无人车、四足机器人等)与空中无人单元(包括旋翼、固定翼、复合翼无人机等)为执行同一侦察任务而建立协作编队,通过资源共享和平台互操作合力完成目标识别任务的过程。
2.1 应用背景
集群协同目标识别的优势是通过同构/异构侦察载荷能力/数量优势和跨维度合作优势实现的,表现为系统功能分布和鲁棒自愈。从整体看,集群侦察范围必然要覆盖整个作战区域;从局部看,在无人平台数量有限的情况下,单位侦察子区域要有尽可能多的无人平台交织覆盖,以实现侦察能力的互补和增强,同时,当某一平台失效时,有利于实现其他任务单元的及时补位,增强系统的鲁棒性和自愈能力。从能力看,与传统的大型空地侦察力量相比,侦察能力被分布到同构/异构空地无人平台上,各任务单元需要密切协作才能满足目标身份识别所需的侦察能力,体现出协作系统的涌现性。从载荷看,集群携带电子信号侦察载荷、可见光/红外侦察载荷、多光谱/超光谱侦察载荷、激光雷达侦察载荷、通信中继载荷等,各侦察载荷对测量实体具有不同的测量空间和置信度。在决策级信息融合过程中,由于各任务单元对战场目标识别具有不同的适应性,有可能产生不一致的结论,本文所述的方法正是致力于解决这一不确定性推理和决策问题。图2给出了空地无人集群协同目标识别示意图。
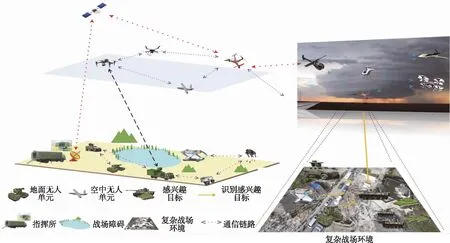
图2 复杂战场环境下空地无人集群协同目标识别示意图
2.2 应用方法
在D-S证据理论框架中,参与目标识别的任务单元可作为相互独立的证据源,待识别目标的种类/类型即是命题,由各任务单元侦测数据产生对所有可能结果的度量,并以基本概率数的形式表示对命题信任程度的大小,便构成了该理论中的证据。之后通过证据组合方法将所有证据进行组合,可以得到一个新的BPA,依据一定的决策规则进行决策,最终得到目标识别结果,图3给出了基于D-S证据理论的空地无人集群目标识别流程。BPA通常根据专家经验、BP神经网络等方法获得,详见文献[25],本文不做赘述。

图3 基于D-S证据理论的空地无人集群目标识别流程图
2.3 决策依据
当利用上文所述改进方法得到一个新的m(Ai)后,需要依据如下规则进行判定:
1)在一次识别过程中,将基本概率数最大值所对应的目标列为优选目标,同时该值应大于辨识框架的基本概率数;
2)基本概率数最高的两个模糊命题差值应大于某一阈值Y1;
3)优选目标的基本概率数应大于某一阈值Y2。
Y1、Y2的设置与协同侦测的无人平台数量、系统可信性要求有关;当小于该阈值,可启动人工判读或与其他来源情报相互印证的方式,若该目标为新目标,为其分配一个新的类,以此更新系统中的数据。
3 仿真算例
选用文献[17]中的数据通过3个算例验证所提方法的有效性。本文想定为某战术演训场正在进行红蓝双方实兵对抗训练,红军某侦察分队利用空地无人集群对蓝军阵地进行侦察,发现感兴趣目标群Z,对其中某一目标x,有5架/辆任务单元进行协同侦测,相应的数据经融合处理,得到5条证据。设Θ={A,B,C},BPA为:
e1:m1(A)=0.55,m1(B)=0.18,m1(C)=0.27
e2:m2(A)=0.68,m2(B)=0.24,m2(C)=0.08
e3:m3(A)=0.57,m3(B)=0.11,m3(C)=0.32
e4:m4(A)=0.64,m4(B)=0.25,m4(C)=0.11
e5:m5(A)=0.70,m5(B)=0.09,m5(C)=0.21
在以下3个算例中,假定e3为综合评估历史识别成功次数和“人机环管”等因素后确定的参考证据,信任调节因子μ=0.90,分辨系数ξ=0.5;为了验证目标识别主体的可信性取值对合成结果的影响,分别令α=0.1,0.3,0.5;β=1。
3.1 各无人平台提供正常数据时
分别采用DST组合规则、Yager[8]、Murphy[26]、曲斌[27]、邓勇[18]、姜礼平[17]以及本文方法进行无冲突证据的组合,表1给出了计算结果。
如表1所示,当各任务单元均提供正常侦测数据时,Yager方法由于取消了冲突因子归一化的过程,完全舍弃了其中有价值的部分,使得绝大部分信任质量落入辨识框架,未能给出正确的识别结果。其余方法虽然均给出了正确的识别结果,但没有考虑产生证据的目标识别主体的可信性问题,即假定其可信性为1。本文基于复合折扣因子从目标识别主体的可信性和证据间相互支持程度两个方面考虑初始证据的可信性,给出了正确的识别结果,且当α取值不同时合成结果稍有变化,说明算法稳定性较好。
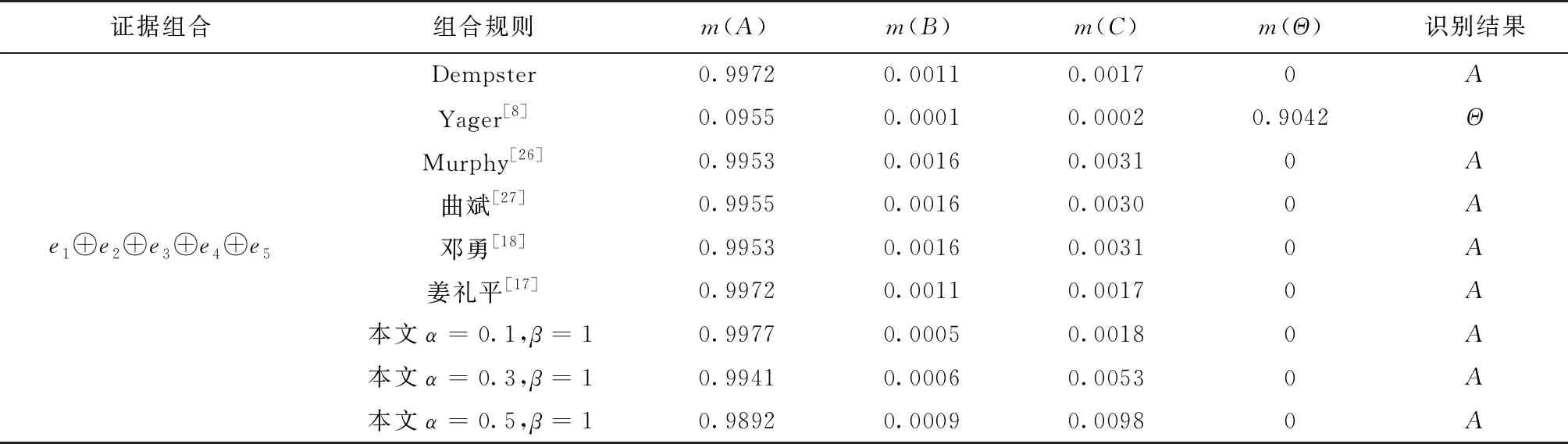
表1 编队各成员提供正常数据时,各方法证据组合结果比较
3.2 某一个无人平台提供错误数据时
设无人集群对某感兴趣目标协同侦测过程中,编队中第2个任务单元因侦察载荷机械故障,提供了错误的侦测数据,信息融合分系统给出的BPA为:e′|2:m2(A)=0,m2(B)=0.21,m2(C)=0.79,即该条证据与其他证据存在严重冲突,表2给出了几种典型改进算法和本文的证据组合结果。
如表2所示,当某一编队成员提供异常侦测数据时,DST组合规则、Yager方法均未能给出正确的识别结果,表现出较差的鲁棒性,究其原因,DST组合规则存在“一票否决”的局限性,即多条证据中任意的mi(Aj)=0,会致使证据组合信任分配过程舍弃对它的质量分配;Yager方法将冲突因子全部划入辨识框架,完全舍弃了其中有价值的信息。Murphy方法、曲斌方法分别采用初始证据算数平均和错位相加后n-1次迭代组合方法,虽然能够给出正确的目标识别结果,但主要处理策略是利用正确信息对冲突证据进行线性补偿,还未对证据本身的可信性进行合理分辨,故其得出的m(A)取值较低。邓勇、姜礼平和本文的方法均考虑了证据间的支持度,同时,本文的复合折扣系数还考虑了目标识别主体可信性的问题,但相较于邓、姜两位专家的方法,本文m(A)在α=0.1,β=1时略有优势。结合算例3.1可以发现当无冲突证据或数目较少时,令α=0.1,β=1可得到更好的结果。但整体来说,在无冲突、仅1条冲突证据时,本方法与各位专家的方法效果相当,源于算法设计基于较多冲突证据的考虑,优势将随着冲突证据数目的增多得到更好的体现。
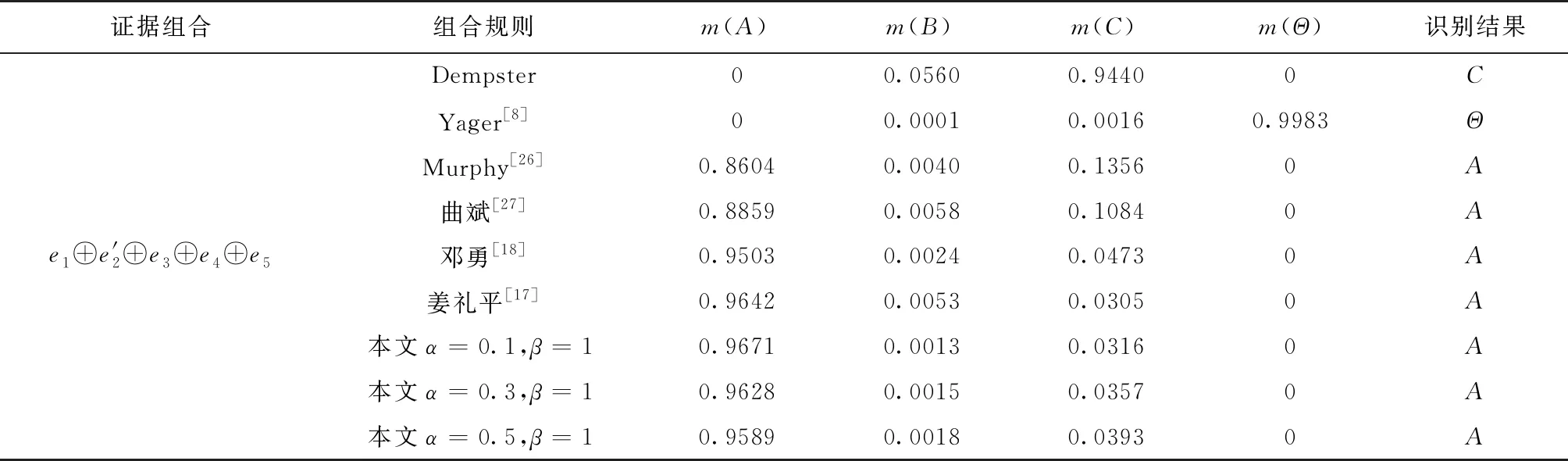
表2 编队中有1个无人平台提供异常数据时,各方法证据组合结果比较
3.3 某二个无人平台提供错误数据时
设无人集群对某感兴趣目标协同侦测过程中,编队中第2、5个无人平台因遭遇蓝方强电磁干扰,提供了异常的侦测数据,信息融合分系统给出的BPA为:
e′|2:m2(A)=0,m2(B)=0.21,m2(C)=0.79
e′|5:m5(A)=0.11,m5(B)=0.82,m5(C)=0.07
其中有2条证据与e1,e3,e4存在严重冲突,表3给出了几种典型改进算法和本文的证据组合结果。
由表3可知, DST组合规则、Yager方法均无法给出正确的识别结果,在3.2小节我们对其原因进行了阐述,这里不再赘述。Murphy方法、曲斌方法虽然给出了正确的识别结果,但m(A)取值仍然较低。邓勇、姜礼平方法均给出了正确的识别结果,但本文的m(A)取值最大,为了进一步验证算法的可靠性和稳定性,绘制了α∈(0,1]且β=1时,m(A)取值变化趋势图,如图4所示。可见,当α取值不同时,m(A)变化率不大,且均具有明显优势。这是因为随着冲突证据数目的增多,仅通过证据间支持度折扣初始证据加大了因低可信性证据相互支持而排斥原本正确证据的风险。本文在算法设计的过程中,考虑了Rei和Sui两方面因素,同时引入了结果精炼机制,使得本方法具备更强的冲突证据组合能力,尤其适合于冲突证据数目较多的情况。这对于恶劣战场环境下各种潜在因素导致的冲突证据较多问题,提供了一种新的解决方法,体现了较强的不确定性处理能力和可靠性。

表3 编队有2个无人平台提供异常数据时,各方法证据组合结果比较
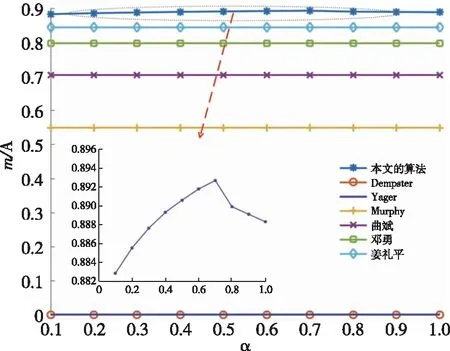
图4 m(A)取值变化趋势图
4 结束语
本文聚焦于D-S证据理论在小型空地无人集群协同目标识别中的运用进行了探讨,针对复杂战场环境可能导致的证据冲突问题提出了一种新的基于综合考虑目标识别主体可信性和证据间支持度的复合折扣系数计算方法,并引入了结果精炼机制。仿真结果表明,本文方法克服了低置信度、高冲突证据组合 “一票否决”的问题,与其他几种典型的改进算法相比尤其适用于冲突证据数目较多的情况。
在未来的研究中,我们将考虑进一步量化历史数据和“人机环管”等因素对无人平台可信性的影响,并进一步提高算法的适应性。
