漂浮基空间机器人抗死区的自适应鲁棒补偿控制
2021-10-19曹泰程陈子豪于潇雁
曹泰程,陈子豪,于潇雁,2,陈 力
(1.福州大学机械工程及自动化学院,福建 福州 350116) (2.流体动力与电液智能控制福建省高校重点实验室(福州大学),福建 福州 350116)
随着科学技术的发展,人类探索领域已达宇宙深处。在这样的背景下,太空机器人在各种太空活动中发挥着越来越重要的作用。由于太空中存在许多不可预测的危险,太空机器人的参与不仅能够有效保障宇航员的生命安全,还能降低太空探索的成本,因此空间机器人控制算法的研究也受到业内的高度重视,相关成果也非常丰富[1-4]。

目前,主要有自适应[10]和鲁棒[11]两种方案用于系统存在不确定性的控制中。鲁棒控制是一个保守型、抗干扰能力强的控制策略,没有学习辨识能力,需要假设系统的不确定性上界。自适应控制恰恰可以弥补鲁棒的缺点,其能辨识外界干扰。而自适应鲁棒控制就是综合了二者的优点,通过自适应控制律学习系统的不确定性信息,从而改善了鲁棒控制的局限性,既保证了系统的稳定性又提高了动态性能[11]。
因此,针对存在死区和一系列不确定因素的漂浮基空间机器人的轨迹控制问题,本文设计了抗死区的自适应鲁棒补偿控制。
1 动力学模型与计算力矩法
考虑建模的普遍性和一般性,以平面自由漂浮基刚性两连杆空间机械臂系统为例建模,如图1所示。该系统可看成由自由漂浮的载体B0、刚性臂杆Bi(i=1,2)组成。图中Oixiyi(i=0,1,2)为各分体连体坐标系,其中O0与载体质心重合;φ0为载体姿态角;φi(i=1,2)为各关节的转角。
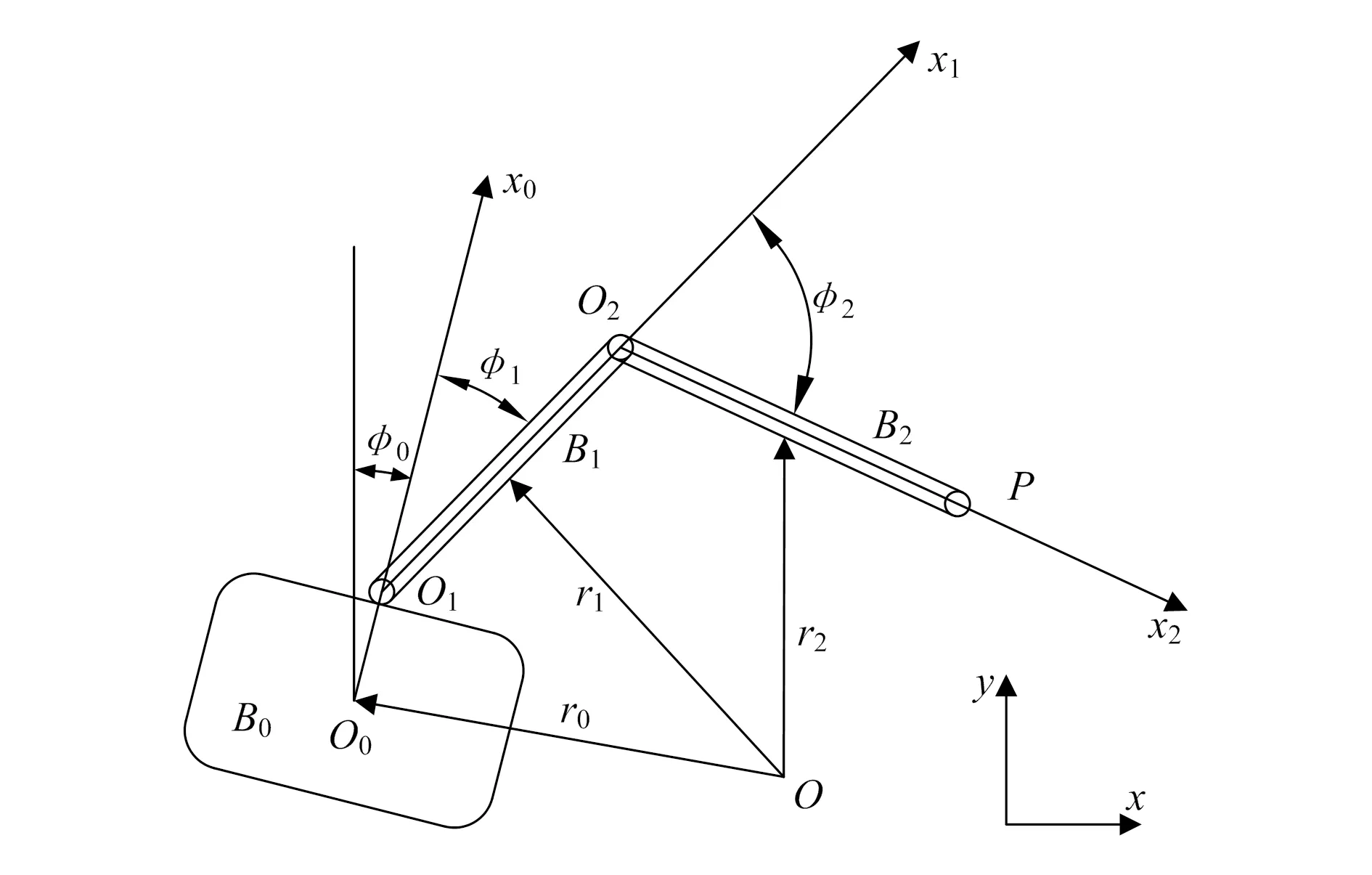
图1 漂浮基空间机械臂
选取载体质心坐标xb,yb,载体姿态角φ0及各关节转角φi(i=1,2)作为广义坐标,根据拉格朗日第二类方程及耦合动量守恒定理得到系统动力学方程:

(1)

M(q)=M0(q)-ΔM(q)
(2)
(3)
则式(1)可写为:
(4)

(5)
考虑计算力矩法,选取计算力矩控制器:
(6)

将式(6)代入式(1)得:
(7)

根据上述分析可知,计算力矩法的使用前提是空间机器人的动力学方程各参数精确已知,但是在现实控制环境中几乎无法实现。因为系统所处环境的变化会引起各参数的不确定性,例如载体质量变化、关节存在摩擦、太空引力梯度变化、宇宙射线扰动等,使得计算力矩法无法完成控制,所以可能无法达到系统的稳定性要求。
因此,需要设计鲁棒控制器作为计算力矩法补偿器,对不确定性项进行补偿,使系统执行器可以跟踪关节空间的目标轨迹qd。则总控制器τ可写为:
τ=τ0+τr
(8)
式中:τ0为式(6)表示的计算力矩项;τr为系统不确定性的鲁棒补偿项。
2 关节力矩输出死区及死区估计补偿器
在众多的空间机器人系统中,死区是一种非常常见的现象,如若不能消除死区的影响,会导致系统的误差产生波动,更严重则会导致控制失效[8]。这对控制器的控制效果会产生严重影响。如图2所示,本文建立了关节力矩输出死区的数学模型。
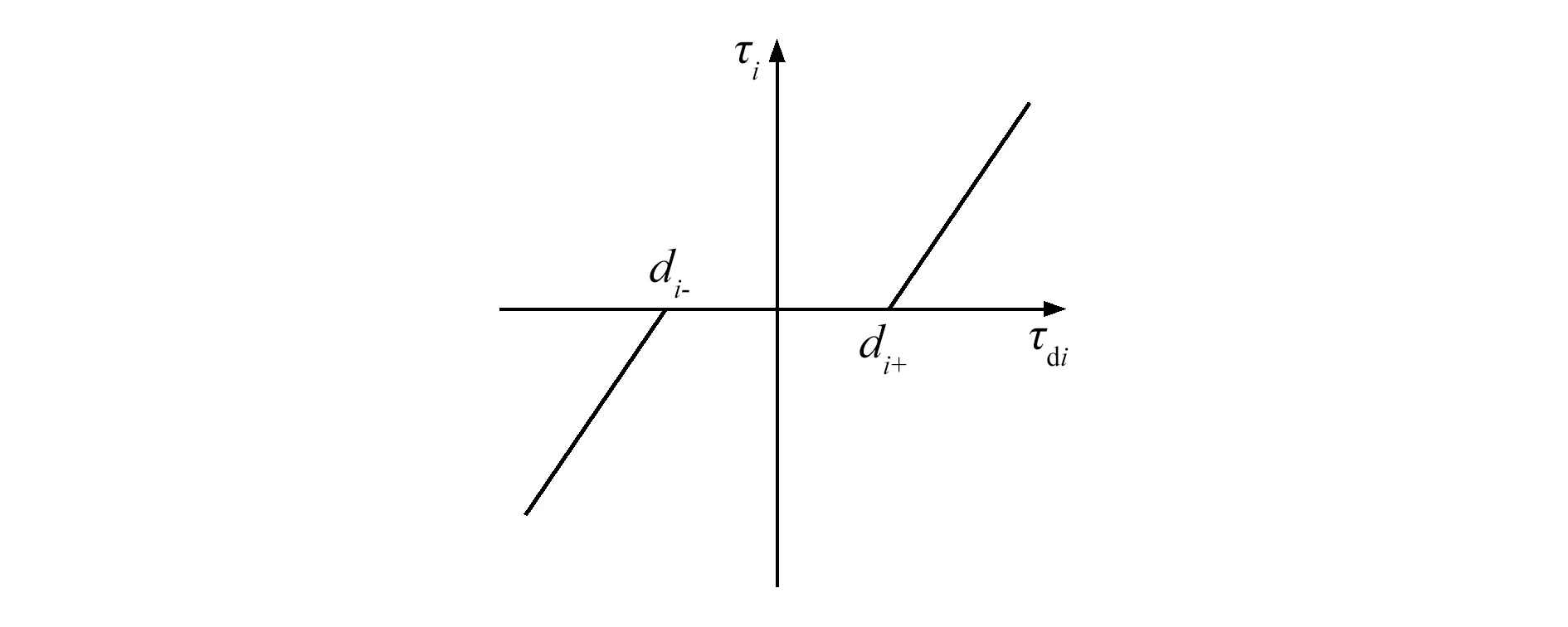
图2 关节力矩输出死区模型
在死区模型中,死区宽度D=[d+d-]T,其中,d-=diag(d1-,d2-,d3-),d+=diag(d1+,d2+,d3+)。死区输入项为τd,死区输出项τ即为控制各关节力矩的输入向量,τd=[τd1τd2τd3]T,τ=[τ1τ2τ3]T。其中各关节死区输出τi(i=1,2,3)可由式(9)求得:
(9)
式中:W(τdi)为死区模型输出的力矩;di-和di+分别为死区宽度区间的左右端点,di-和di+的数值未知且绝对值不一定相等。
τ和τd的关系如下所示:
τ=W(τd)=τd-sat(τd)
(10)
其中sat(τd)=[sat1(τd1)sat2(τd2)sat3(τd3)]T,各项如下:
(11)
针对这种死区,本文设计了一种死区估计补偿器,来消除死区对系统产生的诸多影响。其结构如图3所示。
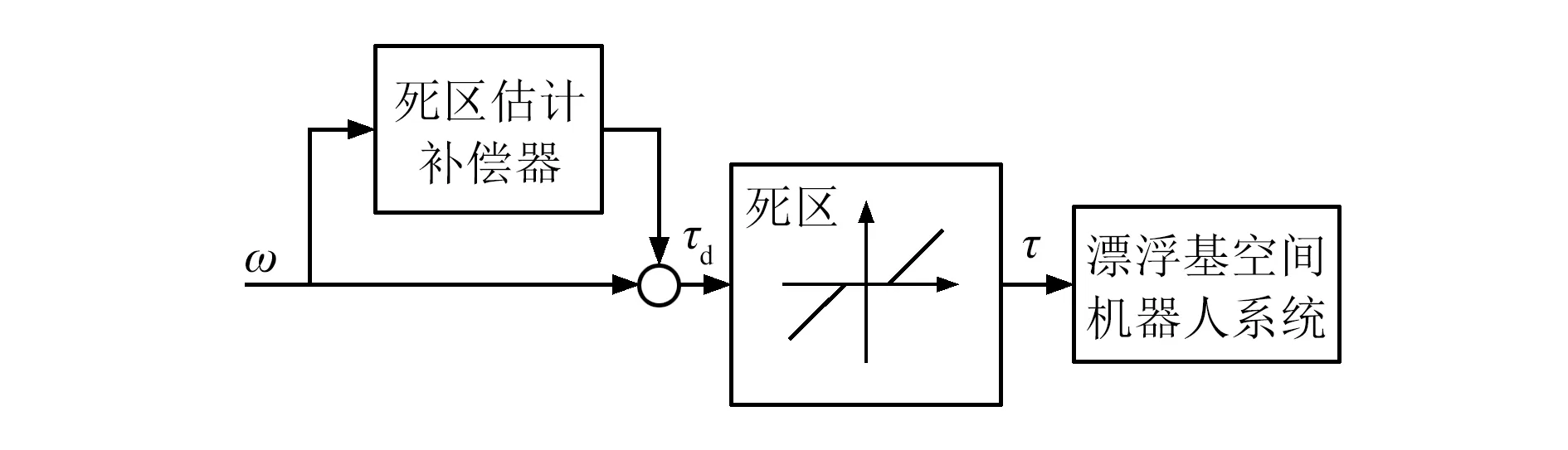
图3 死区估计补偿器原理图
图中,系统的初始输入力矩w通过死区补偿器进行预先补偿得到输入项τd,τd再通过死区模型得到死区输出力矩τ,此时已消除死区对τ产生的影响,此死区输出力矩τ便等于系统初始输入力矩w。
由此过程可得:
(12)
(13)
(14)

初始输入力矩经过死区估计补偿和死区模型得到的死区输出力矩τ为:
(15)
3 自适应鲁棒补偿控制器的设计

e=q-qd
(16)
(17)
定义辅助信号:
(18)
(19)

将式(19)对时间求导,并结合式(1)可得:
(20)

设计的鲁棒控制器为:
(21)
式中:τr为鲁棒控制器表达式;ε为一个很小的正常数;β为系统不确定上界。β满足如下约束方程:

(22)
式中:S=max(1,‖e‖,‖e‖2),为系数向量;μ为系统不确定项。μ的值采用以下自适应算法自动调节:

(23)
式中:γ为正定常数矩阵。式(23)满足如下约束方程:
(24)

(25)
为了证明该自适应鲁棒控制器的稳定性,构造适当的Lyapunov函数:
(26)
式中:kε为鲁棒项增益系数。将式(26)对时间求导得:
(27)
将式(20)代入式(27)可得:
(28)
(29)
可见Lyapunov函数导数的第一项为零,且τ=τ0+τr,可得:
(30)
(31)
由Lyapunov稳定性原理可知,系统是渐进稳定的。
4 算法仿真
为了验证本文提出的抗死区的自适应鲁棒补偿控制策略的有效性,现以存在死区的二连杆空间机械臂系统为仿真研究对象,分别得出姿态角及各关节铰在开启死区补偿和关闭死区补偿两种情况下的轨迹跟踪效果对比图。
其惯性参数选取如下:各段杆长为l0=1.5 m,l1=3.0 m,l2=3.0 m;各分体质量为m0=40 kg,m1=1 kg,m2=4 kg;各分体转动惯量为J0=34.17 kg·m2,J1=1.50 kg·m2,J2=2.00 kg·m2。

计算力矩控制器的控制增益为kv=diag(40,40,40),kp=diag(60,60,60)。
自适应鲁棒控制器参数为γ=20,ε=0.02,Λ=diag(5,5,5)。
系统在开启死区补偿与关闭死区补偿情况下的对比仿真如图4~图7所示。
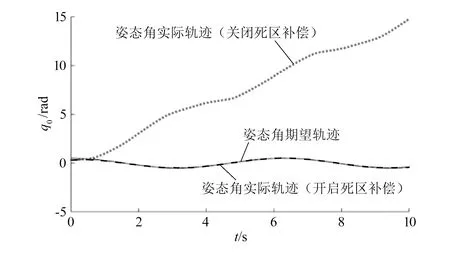
图4 开启和关闭死区补偿情况下姿态角的轨迹跟踪对比图
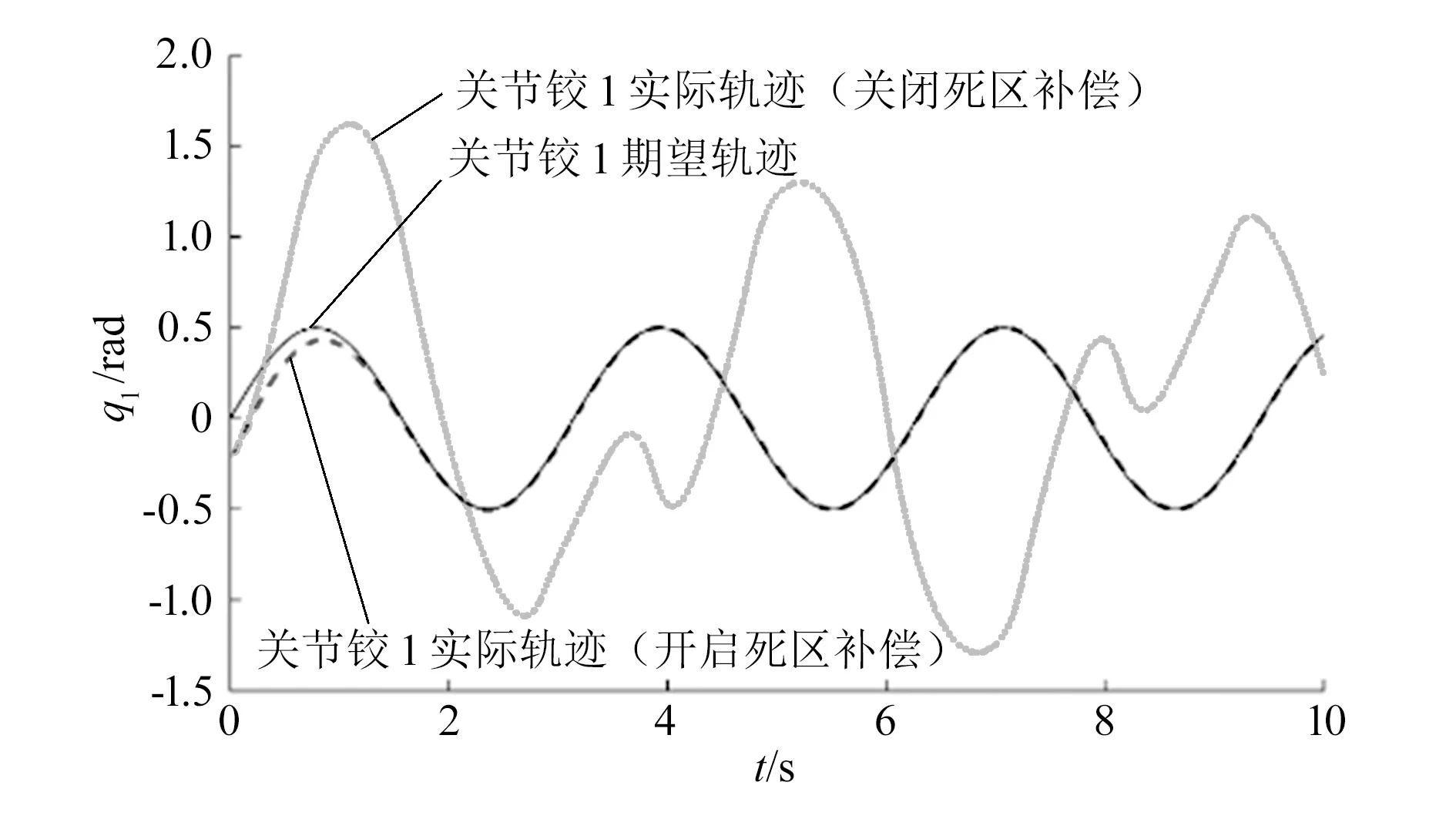
图5 开启和关闭死区补偿情况下关节铰1的轨迹跟踪对比
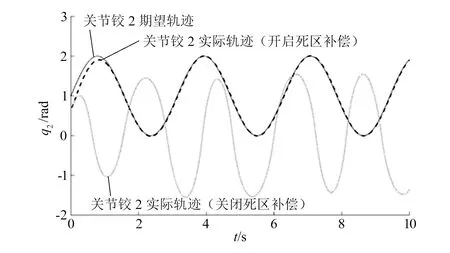
图6 开启和关闭死区补偿情况下关节铰2的轨迹跟踪对比
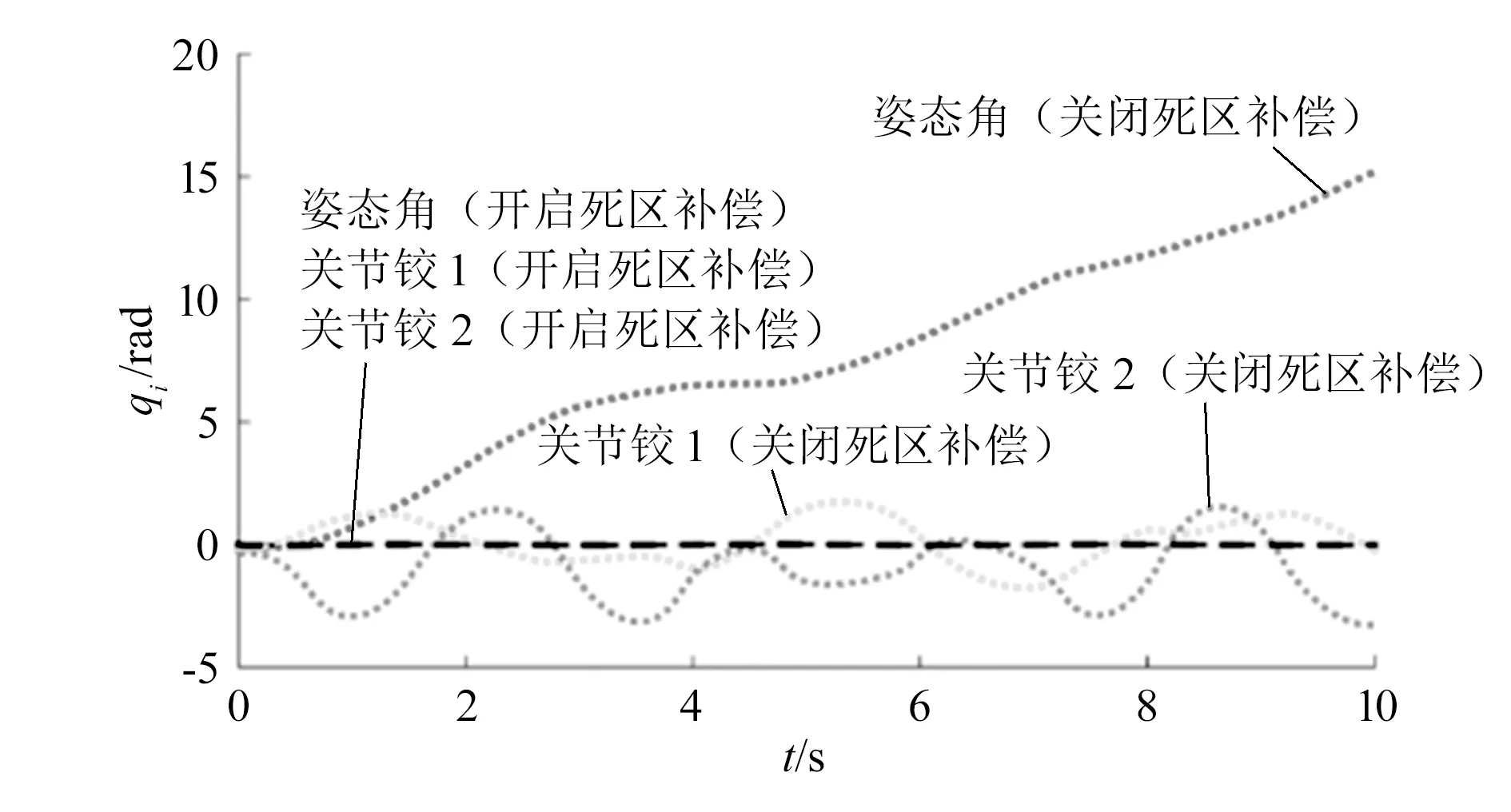
图7 开启和关闭死区补偿情况下姿态角及各关节铰的轨迹跟踪误差对比
由仿真结果可以看出,针对存在死区的双连杆空间机械臂的轨迹跟踪控制,使用本文提出的抗死区的自适应鲁棒补偿控制方法时,若关闭控制器中的死区补偿器,载体姿态角无法跟踪期望轨迹,误差无法收敛;关节铰1和2虽未像姿态角一样严重发散,但是无法准确跟踪目标轨迹,其跟踪误差在零附近无限振荡,导致控制失效。而在开启死区补偿器后,再结合自适应鲁棒补偿技术,各关节铰的角度均能快速跟踪上期望轨迹,且跟踪拟合精度高。
5 结束语
本文讨论了存在死区的漂浮基刚性空间机器人系统的控制策略。首先依据拉格朗日方程和动量守恒定律推导出系统的动力学模型;然后设计死区估计补偿器来消除死区产生的影响,并结合自适应鲁棒控制器对轨迹跟踪进行控制。研究表明,死区补偿技术对存在死区的空间机器人系统的控制精度起着至关重要的影响,证明本文所提出的抗死区的自适应鲁棒控制方法是可行和有效的。未来可将其推广至更复杂的不确定性空间机器人系统的控制中。
