开关磁阻电机驱动系统在电动车驱动控制中的多指标同步优化*
2021-10-19韩敬贤
韩敬贤
(安徽粮食工程职业学院 安徽合肥 230013)
由于电动车依靠电能作业,对驱动控制要求较高,不仅对成本控制、结构简化有一定要求,而且对驱动控制系统的性能有着较高要求[1-3]。目前,国内外研究学者对开关磁阻电机驱动系统研究较多,并且从理论层面上验证了该系统在电动车驱动控制中的应用可行性[4]。为了进一步优化驱动控制性能,文章将探究驱动控制优化方法。
1开关磁阻电机驱动系统
1.1开关磁阻电机作业非线性特征及优化指标的确定
开关磁阻电机特性容易受平均输出转矩影响,文章以四相绕组类型电机为例,以周期内合成电磁转矩进行描述,通过积分计算,求取转矩平均值,计算公式如下:
(1)
公式(1)中,θ代表转子角度;Te代表电磁转矩。
考虑到车辆操作系统作业噪声会影响到乘坐车辆舒适性,并且对车辆驱动模块作业稳定性也有一定影响,必须合理调整电机转矩脉动[5-6]。因此,探究电机转矩脉动成为了电动汽车驱动控制的重要研究内容。将作业周期设定为积分计算周期,通过计算均方根,得到转矩脉动系数,记为TQ,以下为计算公式:
(2)
关于电机转矩平顺系数,是在转动脉动的基础上,求取倒数得到,作为电动汽车驱动控制分析指标。
电动汽车对电机驱动控制中的动力性能要求较高,除了具备较高的爬坡动力以外,还要具备车辆形式最高速度、汽车作业加速度等多个指标[7]。为了满足这些驱动控制需求,可以从增加电动汽车行驶里程数量和输出效率角度出发,通过调整驱动系统框架结构,实现这些控制目标。其中,电动汽车的实时功率变化特征可以用等效功能系数来描述,通过分析系数变化特征,推理出系统作业综合性能。以下为等效功率系数计算公式:
(3)
公式(3)中,Irms代表均方根电流;ω代表电机输出转速;U代表电源电压。
开关磁阻电机性能的优化,需要对各个指标数值采取优化处理,通过增加数值,改善电机指标性能。其中,涉及到的重要指标为平均转矩,增加该指标数值,使得电机输出转矩得指标数值,使得电机作业效率得以提升。所以,在探究优化方案时,需要尽可能地增加目标数值。
1.2系统框架结构及作业原理
电机控制系统框架结构建立在四相不对称半桥型电路基础上,通过角度控制、电流控制、转速控制,对电动汽车进行动态控制。系统框架结构如图1所示。
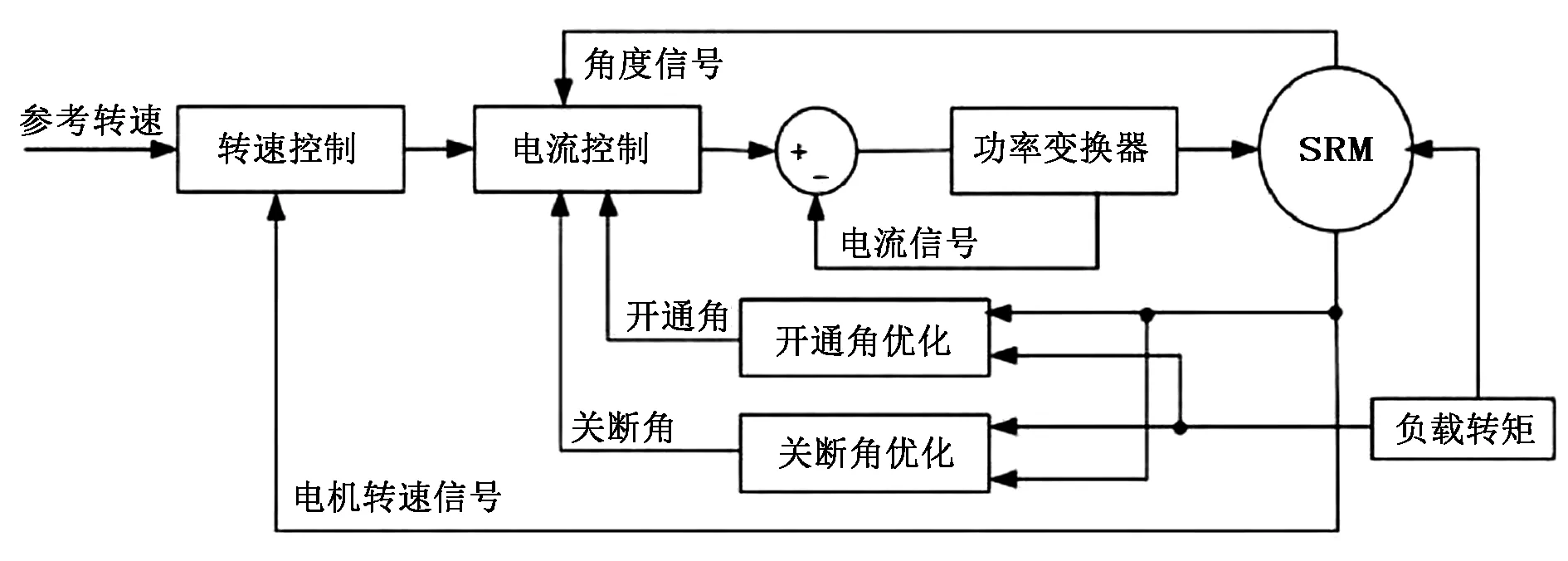
图1 电机控制系统框架结构
该系统作业期间,从左侧输入控制信号,经过转速控制,进入电流控制模块。经过该模块控制调节的信号输入交汇处,功率变换器输出的电流汇总,在强弱调节控制命令下,对汇总信号进行综合处理,而后流入功率变换器中,发送至SRM。在SRM模块控制下,形成两个回路,信号分别发送至角度控制模块和转速控制模块[8]。其中,角度控制模块、电流控制模块、功率变换器组成一个回路;转速控制模块、电流控制模块、功率变换器组成另外一个回路。整个框架结构采用回路控制模式,对电机控制信号采取循环控制,从而实现汽车电机动态控制。
2电动车驱动控制中的多指标同步优化
2.1平均转矩最优化
以平均转矩作为优化指标,以均方根电流作为优化目标,构建以下优化控制函数:
(4)
设定负载转矩最小值1.25N·m,最大值6.25N·m;设定转速最小值500r/min,最大值1300r/min。
2.2多指标同步优化
多指标同步优化是在平均转矩基础上,增加等效功率、转矩平顺度两个系数,在图1框架结构基础上,选取3个指标为优化对象,将控制系统调整为如图2所示的结构。
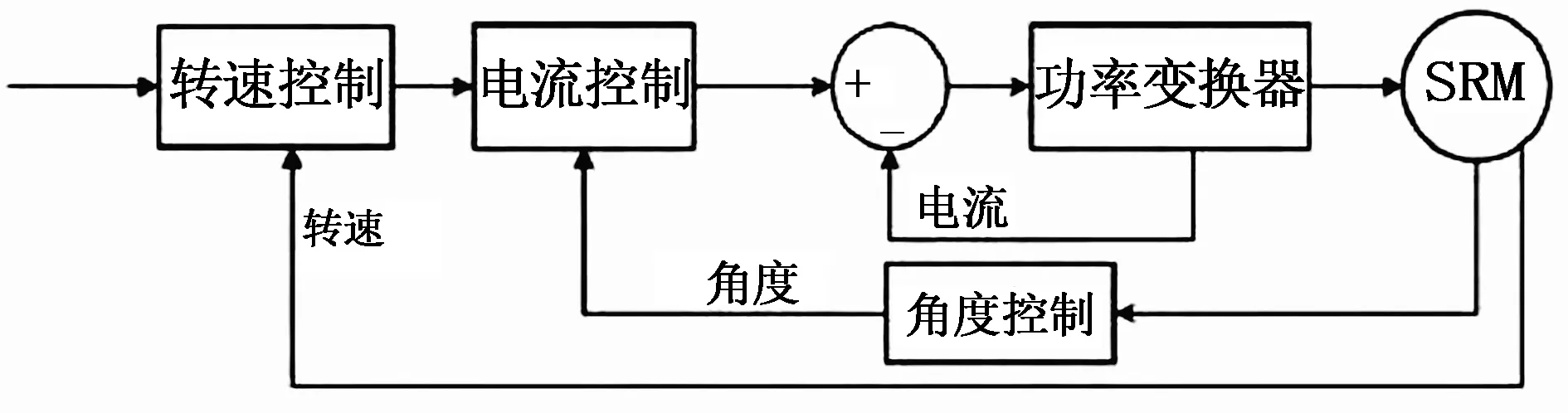
图2 电动车驱动优化控制系统
图2中,在原有的控制回路中添加了开通角优化、关断角优化等模块,同时对多个指标采取优化处理,从而实现同步优化。关于同步优化模型的构建,依据3个参数指标特性,构建综合性能优化函数:

(5)
公式(5)中,参数k1、k2、k3均为权重系数,分别代表均方根电流、转矩脉动、等效功率对应的权重系数。另外,负载转矩、转速参数设置范围同平均转矩最优化策略。
3测试结果分析
该测试在Matlab/SIMULINK环境下建立模型,以未优化的电动车驱动控制方案作为对照组,选取平均转矩、转矩平顺度系数、等效功率作为测试指标,分别对未优化处理的控制方案、平均转矩优化方案、多指标同步优化方案的应用效果进行测试。各项测试指标结果如表1、表2、表3所示。

表1 不同优化策略下均方根电流比例系数测试结果统计表
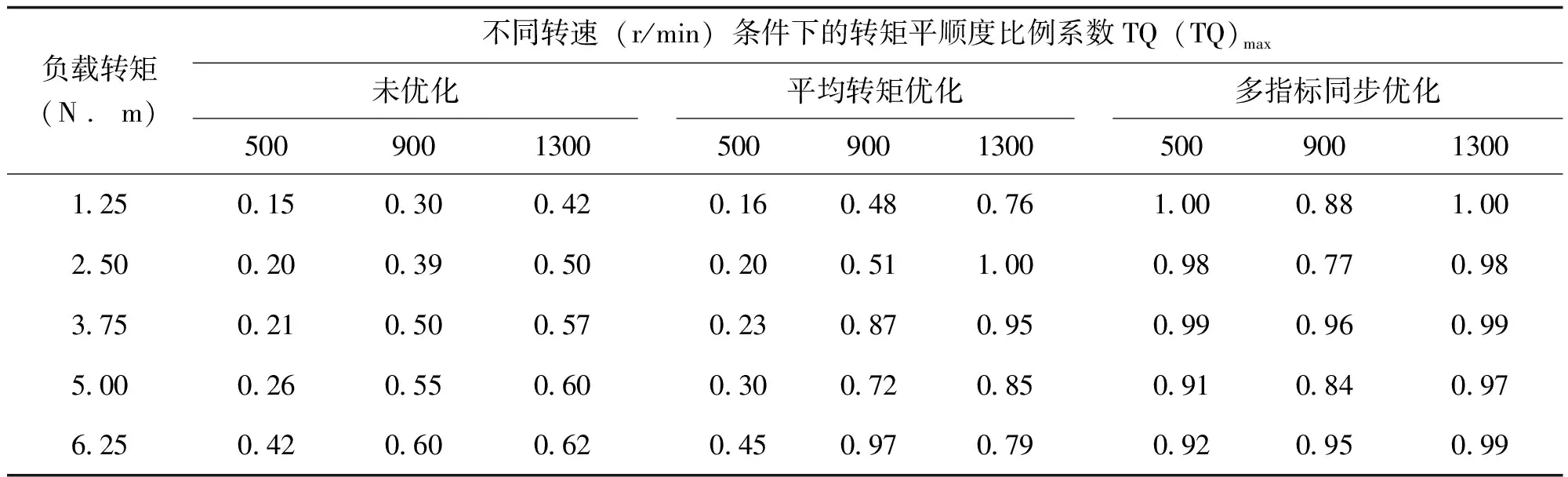
表2 不同优化策略下转矩平顺度比例系数测试结果统计表
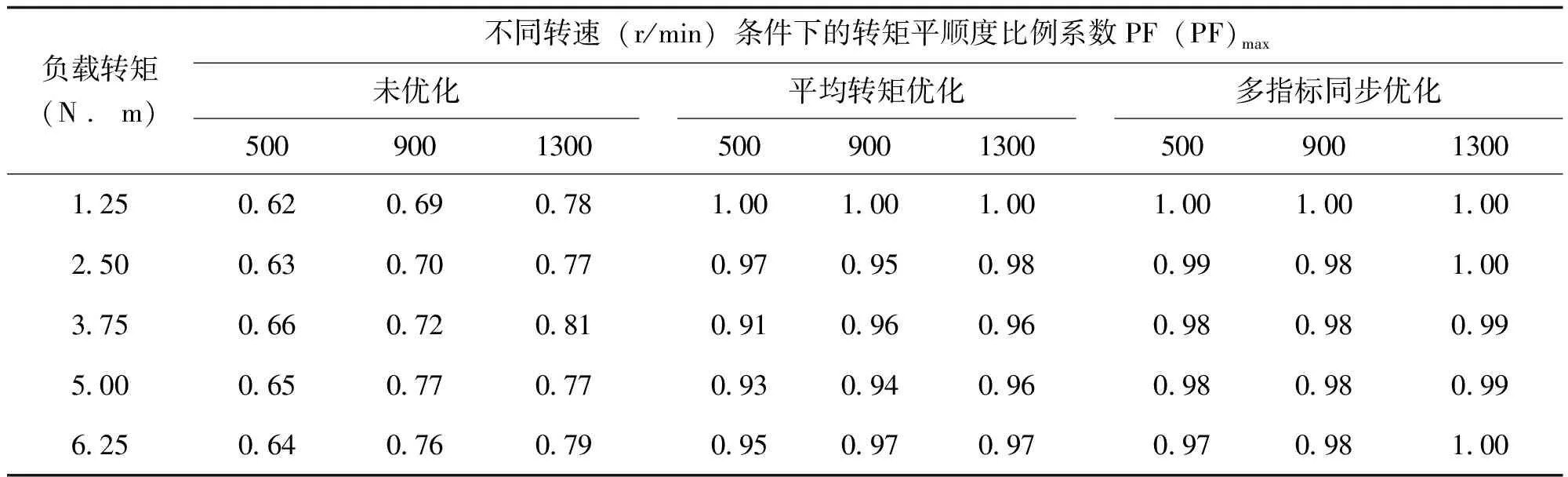
表3 不同优化策略下等效功率比例系数测试结果统计表
表1中测试结果显示,平均转矩优化处理测得的均方根电流比例系数最大,在不同转速和负载转矩条件下的系数均为1.00。多指标同步优化处理测得的指标数据略低一些,但是随着转速的增加,系数同样达到了1.00,符合平均转矩提高优化要求。由此可以推断,两种优化方案较未优化情况下的平均转矩指标均有所改善。
表2中统计结果显示,3种驱动控制下生成的转矩平顺度比例系数中,多指标同步优化控制策略得到的系数数值更大一些,在不同转速、负载转矩条件下得到的数值均在0.77以上,大部分系数数值在0.90以上。虽然平均转矩优化控制策略较未优化控制策略应用效果有所改善,但是数值变化波动幅度较大,最小值为0.51。
表3中测试结果显示,与未优化驱动控制方案应用效果相比,两种优化方案应用现实的转矩平顺度比例系数均有所增加,符合系数增加优化要求。其中,多指标同步优化应用改善效果更加显著。
综合对比3个指标性能改善结果,多指标同步优化的应用优势更为显著。
4结语
文章针对电动车驱动控制优化问题展开探究,选取开关磁阻电机驱动系统作为电动车驱动控制工具,提出平均转矩优化策略和多指标同步优化策略。通过对比测试结果可知,文章提出的多指标同步优化策略在电动车驱动控制效果改善最为显著。在接下来的电动车驱动控制系统开发中,将以多指标同步优化作为改进手段,不断完善电动车作业性能,扩大销售市场。
