城市中心区地铁深基坑钢支撑轴力伺服系统应用研究
2021-10-18史剑
史 剑
(江苏东印智慧工程技术研究院,江苏 南京 210000)
0 引言
随着城市的建设发展,土地资源稀缺,地上地下结构物十分密集已成为一个不争的事实。面对基坑施工过程中周边既有道路、桥梁、地铁等建、构筑物,基坑变形控制已成为城镇化进程的一个刚需。已有研究[1-3]指出,基坑变形按时间顺序可分为:基坑开挖前的变形、基坑开挖至底板施工完毕期间的变形、底板浇筑后的变形;其中开挖阶段安全问题最突出,变形最大,此阶段变形控制是深基坑变形控制的重点。而钢支撑是开挖阶段维护基坑稳定的一项重要措施,在基坑工程中起到至关重要的作用。
传统钢支撑在深基坑支护过程中主要面临以下实际问题:①传统钢支撑在安装时采用液压设备施加预应力,打入钢楔块进行锁定,锁定过程中即产生轴力损失,且后续无法调整;②传统钢支撑轴力变化取决于围护结构变形,处于被动受力状态;③传统钢支撑补偿具有滞后性,补偿时围护结构位移无法得到控制[4]。钢支撑轴力伺服系统[5-7]是由硬件设备及软件程序组成的一套智能控制系统,它的工作原理是利用钢支撑轴力补偿装置代替传统钢支撑系统中的活络头,由液压动力控制系统对千斤顶压力进行调整。通过 24 h 监控并根据采集到的数据实现低压自动伺服,高压自动报警,进行位移与轴力双控,能够有效地减少因钢支撑补偿滞后引起的变形。
本文以南京地铁 5 号线中心城区山西路站基坑开挖钢支撑轴力伺服系统应用为例,分析基坑开挖阶段钢支撑轴力伺服系统下基坑变形及周边建构筑物沉降控制效果。
1 案例分析
1.1 工程概况
图 1 为南京地铁 5 号线山西路站平面布置图。山西路站沿中山北路跨山西路和湖南路路口布置,中山北路现状宽度 40 m。山西路和湖南路现状宽分别宽 33 m和 34 m。车站为地下 2 层岛式车站,站台宽12 m,站后设单停车线。主体结构标准段宽 21.1 m,端头井宽 25.3 m。车站共设 4 个出入口、2 个风亭、2 个消防疏散口,其中 1 号、2 号出入口由“湖南路商业街”代建。车站南端(小里程端)一侧盾构始发,一侧盾构接收;停车线段设盾构始发井,北端(大里程端)盾构接收。

图1 山西路站总平面图
山西路站为车站起迄里程为 K30+702.733~K31+215.733,总长 513 m,站台宽度 12 m,标准段宽度 21.1 m,底板埋深 16.94 m。根据建筑布置和使用功能的要求,该站采用两层单柱双跨箱型框架结构。
1.2 水文地质概况
拟建场地处于秦淮河漫滩平原区,砂土、软土发育,工程地质条件一般。图 2 所示为山西路站地质情况剖面图。从图中可以看出,场地内地层从上到下依次为:①-1 杂填土层、①-2 素填土层、②-1d3 层粉砂、②-2b 3-4 层淤泥质粉质黏土、②-4b 2 层粉质黏土、③-1b2 层粉质黏土、③-3b3 层粉质黏土、③-4b2 层粉质黏土(主要分布单渡线段)、③-4-1e 含卵砾石粉质黏土、③-4-2e 中粗砂含卵砾石(主要分布单渡线段)、J3l-2 层强风化岩、J3l-3 层中风化岩。车站主体结构基底土层主要为 ②-2b3-4 层淤泥质粉质黏土及 ②-4b2可塑粉质黏土,岩土层工程特性差异较明显。基岩面埋深起伏变化较大,中部浅、两端深。
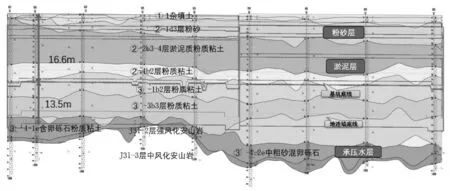
图2 山西路站地质剖面图
地下水稳定水位埋深 0.50~2.80 m,平均高程 8.96 m,场地地下水位年变化幅度 1.0 m 左右。场地③-4-2e 层承压水水头埋深 1.50 m,高程为 9.08 m。含水层常年有水,水头标高略低于潜水稳定水位,与潜水含水层联系弱。
1.3 周边建筑物概况
南京地铁 5 号线山西路站位于中心城区,周边敏感建筑较多,且建筑年代基础形式不一。根据南京市关于地铁建设沿线房屋安全管理的相关规定,对秦淮河漫滩区≥ 2 倍基坑深度为主要影响范围进行临近建筑物状况调查,结果如表 1 所示,其中 H 为山西路站基坑深度。从表中可以看出,山西路站周边建筑物年代久远,大量低层建筑物基础形式不明,对基坑开挖与周边环境保护带来了很大的挑战。

表1 山西路站主体结构主要临近建筑物状况描述表
2 开挖工况及伺服支撑实施方案
车站围护结构采用地下连续墙+内支撑型式。支护结构采用 0.8 m 的地下连续墙。由于车站处于市中心,为保障社会交通,车站主体结构基坑开挖采用半盖挖法施工。标准段基坑竖向设 4 道支撑,第一道支撑为钢筋混凝土支撑,第二、三、四道支撑采用φ800 mm 钢支撑。山西路站主体地下连续墙及第一道钢筋混凝土支撑施工于 2019 年 1 月 20 日完成,主体基坑于 3 月 30 日- 4 月 3 日完成第 2 层土方开挖并架设钢支撑;4 月 3 日- 4 月 28 日完成第 3 层土方开挖并架设钢支撑;4 月 25 日- 6 月 13 日完成第 4 层土方开挖。
为保护主体基坑 25~32 轴人和街民宅,主体基坑第二~四道 74~92 采用支撑轴力伺服系统,共计 57 根。轴力伺服系统的特点在于它可以通过自动调节油缸长度来弥补钢支撑的压缩量,主动控制地下墙的位移。基坑伺服钢支撑段平、纵剖面图分别如图 3 和图 4 所示,伺服段全部为φ800 mm 伺服支撑,总共 57 根,每 8 根伺服钢支撑共用 1 台数控泵站,所需泵站数量共计 8 台。因场地关系,泵站沿南边靠围挡放置。伺服支撑于 4 月 1 日随基坑开挖后开始安装,6 月 13 日安装完毕。具体伺服钢支撑安装时间如表 2 所示。

图3 基坑钢支撑及泵站平面布置图(单位:mm)
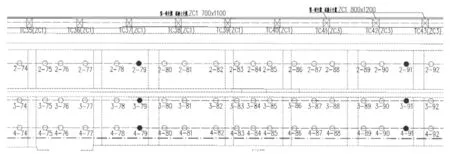
图4 基坑伺服钢支撑纵剖面图

表2 山西路站基坑伺服支撑安装时间表
3 伺服钢支撑数据分析
基坑开挖过程中伺服支撑段钢支撑轴力、围护结构水平位移及周围建筑物监测布点图如图 5 所示。图 6 所示为随着基坑开挖与支撑施工伺服支撑段测斜孔所测围护结构水平位移深层水平位移曲线。表 3 所示为开挖过程中伺服支撑段对应位置测斜孔所测围护结构最大水平位移。根据施工监测深层水平位移数据可以看出,伺服支撑段围护结构最大水平位移 16.01 mm,位移深度比 1.0 ‰。
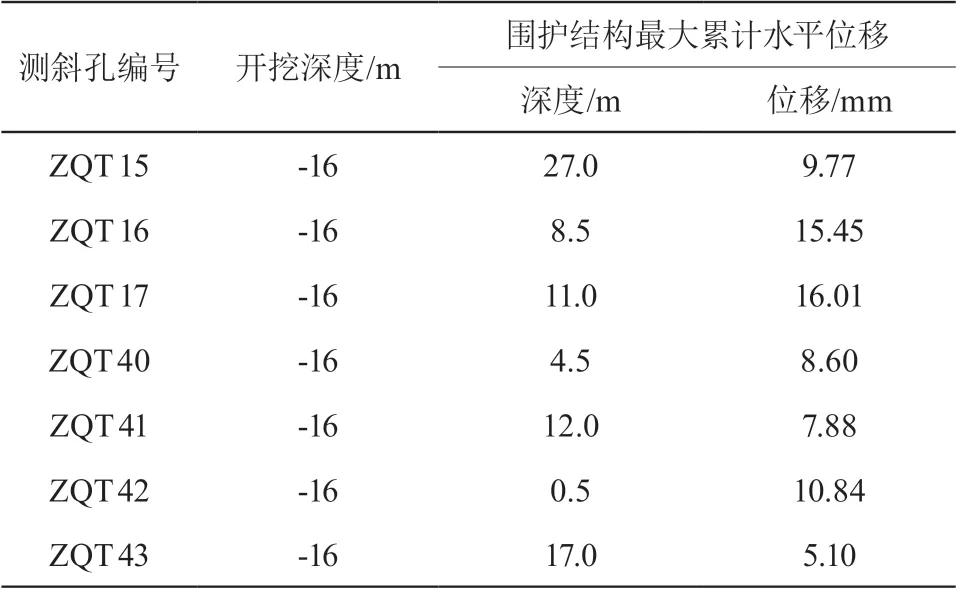
表3 围护结构最大水平位移汇总
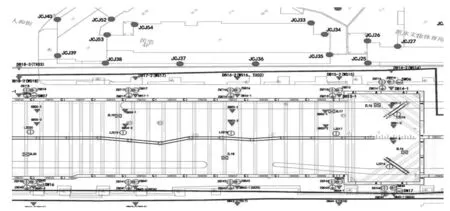
图5 监测测点布置图
基坑围护结构变形最大值主要发生在第 3 层及第 4 层位置,总体结构变形不大。伺服钢支撑位置处围护结构水平位移处于稳定、可控状态。由于第 3 层到第 4 层 位置开挖后架设支撑不及时,围护结构无支撑暴露时间较长,变形由此增大。这主要是由于支撑未及时架设导致坑底土体的应力水平相对较高,土体在较高应力水平下经历了蠕变的高速发展。
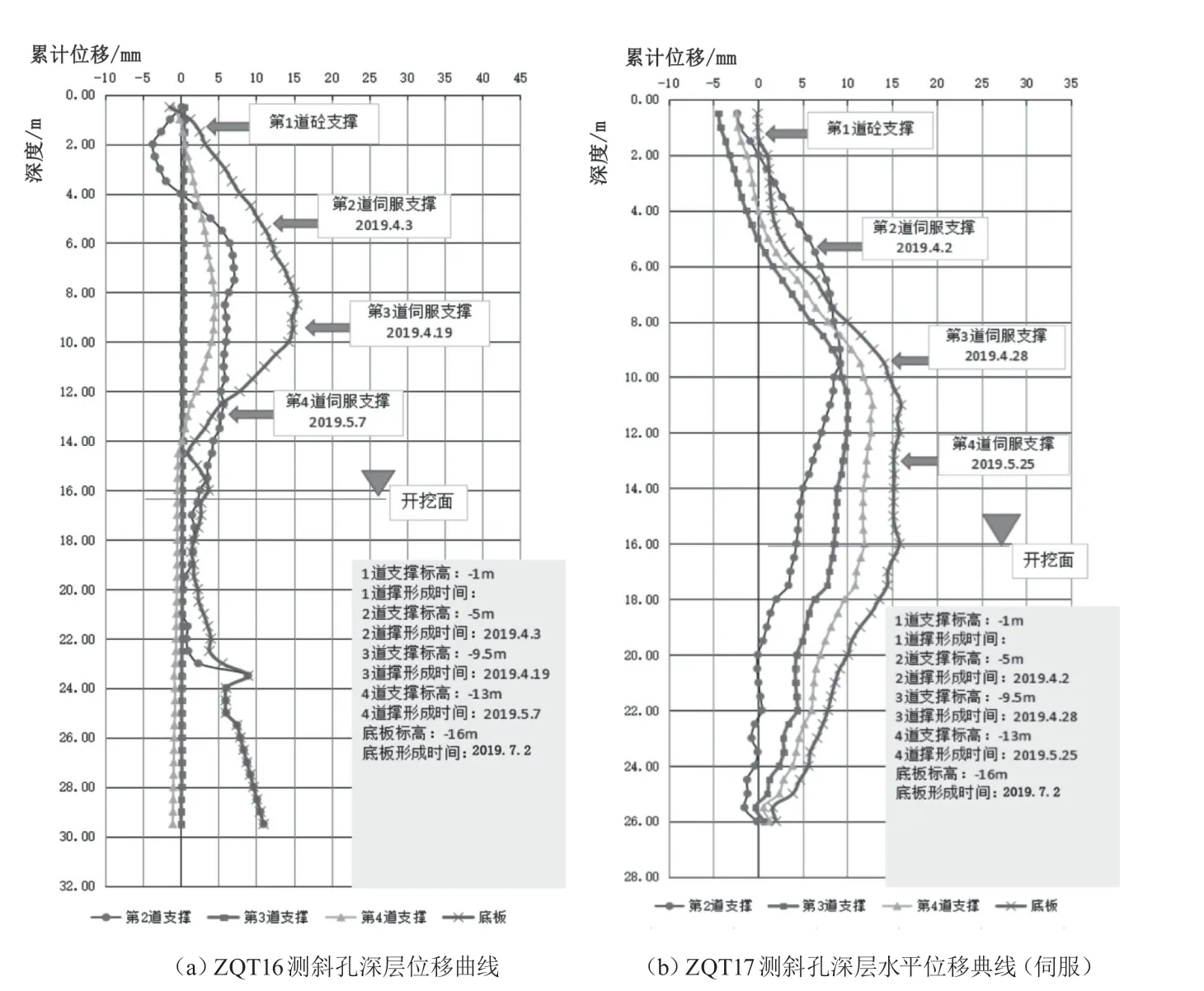
图6 围护结构测斜孔水平位移曲线
表 4 和表 5 分别给出了伺服支撑在各级施工工况下的轴力及对应深度下围护结构水平位移典型数据。第 2 层土方开挖伺服支撑控制范围内的水平位移被控制在 3 mm 之内;第 3 层土方开挖伺服支撑控制范围内的水平位移被控制在 0 mm 之内;第 4 层土方开挖伺服支撑控制范围内的水平位移被控制在 3 mm 之内。随着基坑开挖与支撑,施工伺服支撑段各级支撑对应深度处围护结构水平位移随时间变化典型曲线测斜孔深层水平位移曲线如图 7 所示。伺服钢支撑安装后,支撑所在高度的围护结构水平位移呈有明显收敛趋势。随着伺服支撑的架设,变形处于稳定状态。基坑支护结构在支撑暴露期间的变形得到了较好的控制。

图7 围护结构各测斜孔水平位移-时间曲线

表4 ZQT 16 测斜孔处伺服钢支撑轴力及水平位移数据表

表5 ZQT17 测斜孔处伺服钢支撑轴力及水平位移数据表
基坑开挖阶段房屋沉降监测布点和监测数据如图 8 所示。从监测结果可以看出,基坑围护结构水平位移最大为 16.01 mm,房屋最大沉降为 31.05 mm,差异沉降不明显,满足基坑变形控制要求。

图8 建筑物沉降变化曲线图
4 结论
南京地铁 5 号线山西路站标准段基坑开挖,为保护周边敏感建筑物采用钢支撑轴力伺服系统施工。本文通过分析开挖过程中围护结构水平位置、支撑轴力及建筑物沉降监测数据,主要得出以下结论。
1)开挖期间基坑围护结构水平位移最大为16.01 mm,房屋最大沉降为 31.05 mm,满足变形控制要求,钢支撑轴力伺服系统的应用保障了基坑安全高效开挖。
2)开挖期间由于钢支撑未及时架设将直接导致围护结构水平位移和建筑物沉降明显增大。随着轴力伺服系统钢支撑的架设,变形能够得到及时控制,之后处于稳定状态。
3)通过伺服钢支撑主动、实时调整支撑轴力能够实现对围护结构变形的控制的有效性和长期性。Q
