下肢外骨骼机器人在运动康复中的协同性研究
2021-10-18王长剑赵一平
王长剑,赵一平
(淮北师范大学 体育学院,安徽 淮北 235000)
体育运动强度的增大有时候会导致人体机能损伤,尤其是竞技性非常强的运动,如短跑、足球等,极易发生运动损伤,尤其是下肢的损伤.下肢外骨骼机器人是一种模拟人体下肢运动的机器人,可以设计好程序助力恢复期的运动员进行恢复性的练习及生活,会帮助运动员进行伤后康复.
下肢外骨骼机器人是一种可以供人穿戴,对人体起到保护、保温的作用或是仿制人体结构构造来完成的机械装置.下肢外骨骼机器人通过模仿人体的行走过程,提前调试机器人的运动状态响应,使其完全符合人体的行走轨迹.在未来,它们不仅将在运动康复领域有良好的发展,而且在生物学等领域具有广阔的发展前景.
下肢外骨骼机器人最早由国外研发生产,被用来辅助人体伤后的康复,它能够在短期内提高人的运动机能以及突破人体某些运动极限,因此许多国家对其研发给予高度重视.外骨骼机器人最早主要是为了增强体能从而提高单兵的作战能力.在21世纪初,世界上许多国家都加大推进军事机器人研发,主要目的是为了提升国家的军事力量.下肢外骨骼机器人又被用于医疗康复领域,如荷兰科学家设计的LOPES机器人,瑞士研制的LOKOMAT机器人,以色列设计的Rewalk机器人,都可以用来帮助腿脚不便的人行走和促进治疗后病人的康复,甚至可以让瘫痪的病人重新站立行走.鉴于其重要的实用价值,世界上很多国家和地区开始全面研究下肢外骨骼机器人技术.
我国从20世纪70年代开始研究,研究机构主要在一些知名高校.1981年中国人工智能学会的成立,标志着我国下肢外骨骼机器人的研究走向正轨.我国科学家经过40年的艰苦奋斗,目前我国在下肢外骨骼机器人领域的研究水平正在向世界领先国家追赶.2006年,清华大学开始对下肢外骨骼机器人进行研究,设计了一种安装驱动电机的下肢外骨骼设备;浙江大学设计了一种采用模糊神经网络算法等控制的下肢外骨骼机器人来帮助下肢受损的患者进行康复;电子科技大学设计了一种通过采集人大脑的信息来控制行走的下肢外骨骼机器人;2018年3月,由西北机电工程研究所研制的一款军民两用“星云外骨骼助力系统”在中国某兵器工业集团展出,此款外骨骼系统属于中国最新一代外骨骼系统,相较于第一代传统外骨骼系统,这款外骨骼系统结构十分精简,装备到人体上,感觉就像一个轻背包,去掉沉重的金属骨架后,使其更贴近于实战应用.
近年来,针对下肢外骨骼机器人的研发已经取得了很大的成就,主要是仿PD关节控制和鲁棒自适应控制,由于这些方法都存在一定的局限性.因此设计一种新型的、更加稳定的下肢外骨骼机器人控制系统有很强的实用性和研究价值.
1 下肢外骨骼机器人的发展趋势
目前,下肢外骨骼机器人存在着驱动效率低、体积大、协调性差等问题.随着科学技术的不断发展和机器人研发技术水平的不断提高,下肢外骨骼机器人的发展将会更加全面、智能化、轻便和易穿戴,更高效、更可靠、更安全、更稳定,功能也将多样化.
由于下肢外骨骼机器人是多种技术的综合和集成,目前也仅仅在实验的初级阶段,其稳定性还有待提高,此外,下肢外骨骼康复机器人技术还尚未成熟,还没有广泛应用于普通人的生产生活中,这也是下肢外骨骼机器人售价昂贵和使用者少的原因之一.加强对下肢外骨骼技术的改进是未来研究的热点,此项目的研发会给老百姓带来实实在在的福音.
1.1 下肢外骨骼机器人的未来发展趋势
1) 良好的团队合作
充分发挥团队智慧,在未来,高度智能的类人机器人应该也有能力相互合作.
2) 结构轻巧
由于下肢外骨骼机器人是可以穿戴的结构,因此要考虑穿戴者的舒适度,要设计的轻巧、方便、舒适,做到穿戴方便、绿色环保,尽量减少能源的使用.
3) 相互干扰性小
主要从解决对人体各个方面限制的角度去考虑.应该加大减少人与下肢外骨骼机器人的正面接触,减少人机互相干扰.
4) 低成本
成本要尽可能低,功能要全面,满足广大运动员的需求.
5) 更加智能化和拟人化
由于下肢外骨骼机器人的任务是完成人在某些特殊情况下不能完成的任务,因此其在结构上更加拟人化,随着科学技术的不断进步和发展,下肢外骨骼机器人将会更加智能化.
2 人体步行下肢各关节的运动学规律分析
2.1 分析目的
要了解下肢外骨骼机器人的运动规律,必须要先了解人的步态信息.外骨骼机器人本质上依赖于关节坐标值(即关节转角值)的变化.例如,预先记录教学机器人各位置关节的转角,当任务结束时,控制器给出每个关节的旋转角度来记录数据,使机器人能够按照预定的位置和定位姿态有序地完成运动.
2.2 步态分析系统
本文采用Cortex软件和三维红外被动式光学动作捕捉系统对人体的步态数据进行采集.首先将两个位置传感器分别置于人体下肢的髋关节、膝关节和踝关节上,通过模拟信号的形式将采集到的部分信息实时发送出去,然后进行模数转换,将传感器中人体的运动信息传输给计算机,按照接收到的信号计算运动过程中的参数.该方法速度较快,精度很高,但也有一些缺陷,对人在行走过程中步行速度的要求相对严格,必须放慢速度,收集的数据也可能会丢失,需要修复的后期获得理想的步态信息,传感器的位置安放也比较麻烦.由于场地的局限性和相机位置改变可能出现扰动、荧光点的抖动与衣物的遮挡人体步行速度不易控制,导致MATLAB最后成型图像较为杂乱,锯齿较多,因此采用最小二乘滤波法进行处理,使成像曲线显得更为圆滑,方便后期实验的进行.
3 动力学分析与建模
机器人的控制问题是研究下肢外骨骼机器人的主要问题.根据建立的动力学模型和其动态特性,选择合适的控制器让下肢外骨骼机器人的关节变量可以跟随期望轨迹,并通过仿真验证可行性.
研究关节机器人动力学的主要方法有拉格朗日分析力学方法、牛顿-欧拉公式等.由于拉格朗日方法的概念简单,可以在参考坐标系的系统模式下独立推进,指导运动方程,因此本文使用拉格朗日公式.
3.1 拉格朗日方程
拉格朗日函数L被定义为系统动能K和势能P之差,如下所示:
L=K-P
(1)
3.2 下肢外骨骼机器人连杆系统拉格朗日方程
人体下肢可以等效为下图所示的一个二连杆模型:
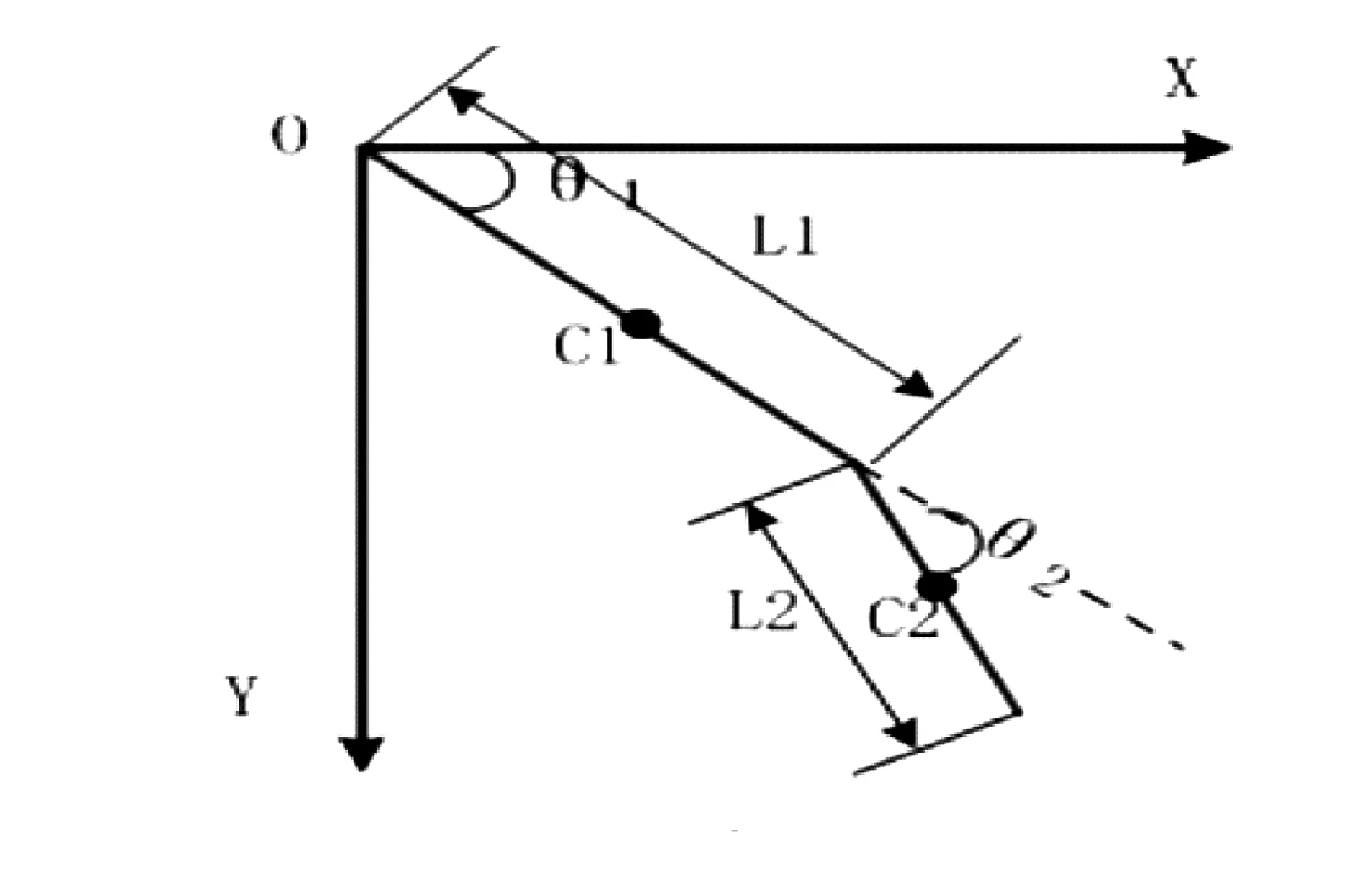
图1 二连杆等效图
设大腿长度为L1,质量为m1,小腿长度和质量为L2,m2;θ1,θ2分别表示髋关节和膝关节旋转的角度,质心C1(x1,y1),C2(x2,y2),质心距离O的距离分别为d1,d2
则
x1=d1cosθ1
(2)
y1=d1sinθ1
(3)
x2=L1cosθ1+d2cos(θ1+θ2)
(4)
y2=L1sinθ1+d2sin(θ1+θ2)
(5)
(6)
(7)
(8)
(9)
Ek=Ek1+Ek2
(10)
(11)
(12)
Ep=Ep1+Ep2
(13)
又拉格朗日函数的表达式为:
L=Ek-Ep
(14)
拉格朗日方程定义为:
(15)
由以上式子得:
=m1gd1cosθ1
(16)
(17)
简化后,动力学矩阵方程为:

(18)
3.3 外骨骼机构与人体协同的仿真验证
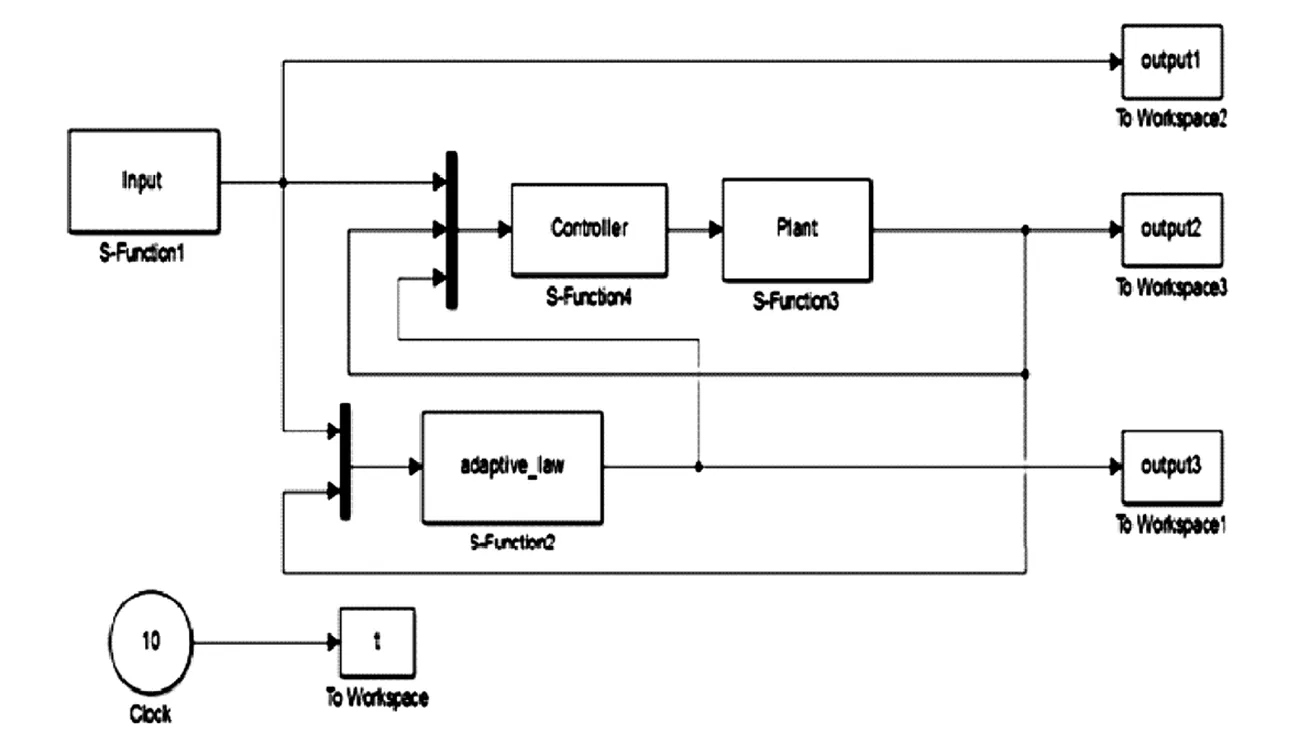
图2 鲁棒自适应控制框图
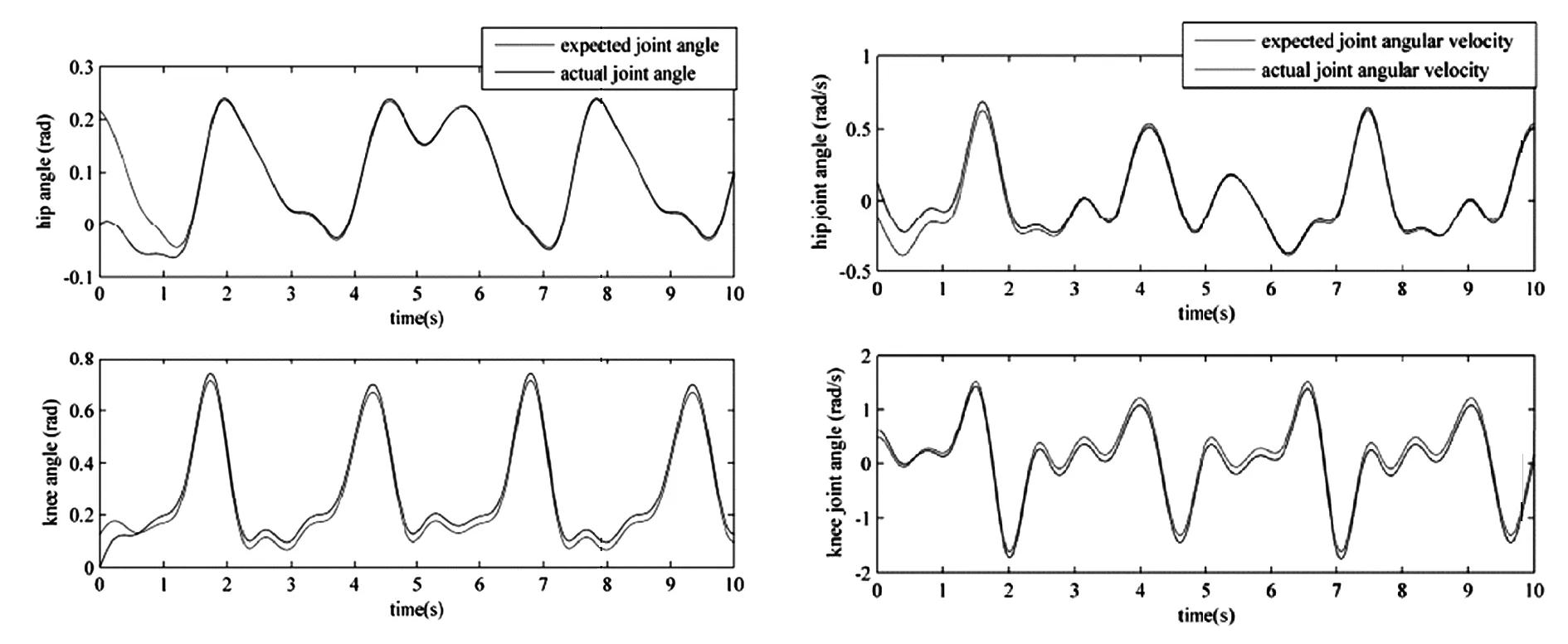
图3 关节角度跟踪曲线 图4 关节角速度跟踪曲线
通过建立的拉格朗日方程,可以为我们接下来选取控制器做准备,基于建立的动力学模型,本文设计了一种鲁棒自适应控制与PD控制结合的控制器,并进行了仿真.
4.3.1 仿真实例
根据建立的动力学模型及下肢外骨骼机器人的动态特性,本文采用了一种鲁棒自适应控制与PD控制相结合的鲁棒自适应PD控制,并在MATLAB环境中对其进行仿真,见图2~4.
由仿真可以看出,采用鲁棒PD自适应控制的下肢外骨骼模型的角速度和关节角度与预期相当接近,证明了本文设计的模型在运动员下肢损伤康复中的应用是可行的.
4 总结
本文主要针对运动员下肢受伤后康复的问题提出了一种将正常人的步态作为输入的运动康复机器人康复训练方法.通过使用 CORTEX 软件跟三维红外被动式光学动作捕捉系统组合,捕捉受试者走动时动作数据采集、分析,实现对人体步态的三维分析.本文首先分析人体的运动过程,然后利用三维红外光学被动式运动捕捉器采集人体步态数据,再对其进行运动学分析,掌握其运动学规律,并对其进行动力学建模进行了仿真.
1)了解目前该问题的研究重点和难点.本文对国内外主要科研机构和高校外骨骼机器人的研究进展进行了调查分析,明确了下肢外骨骼机器人的主要研究内容和需要解决的问题,并设计了研究方案.
2)采集了多组人体步态数据,利用MATLAB软件对步态原始数据进行最小二乘法滤波,绘制并分析了人体各关节在行走过程中的动态曲线.
3)分析下肢外骨骼机器人的结构与机理,并用拉格朗日法对下肢外骨骼建立动力学模型,为后续的控制器设计做准备.
4)通过仿真实验证明了本文设计的采用鲁棒自适应PD控制的下肢外骨骼机器人对运动员损伤后的康复是非常有帮助的.
