基于Flexterm的自动化码头装卸作业分析
2021-10-17王帅
王帅

摘 要:自动化集装箱码头作为衔接水运及其它运输方式的重要物流节点,迎合了我国交通强国的需要,是未来码头发展的必然趋势。本文基于合理的假设条件和参数设置,利用Flexterm仿真软件对不同的自动化码头布局进行装卸作业分析。实验结果表明,垂直式的码头布局形式能有效减少整体的作业时间和相关设施的空闲等待时间。
关键词:Flexterm;仿真模拟;自动化码头;装卸作业
中图分类号:U693 文献标识码:A 文章编号:1006—7973(2021)09-0072-03
1 引言
随着国际贸易和全球化的快速发展,各国间的联系越来越紧密,港口在物流运输业中也占据着越来越重要的地位。随着码头货物吞吐量的增加,船舶不断朝着大型化、重型化发展,提高集装箱码头的核心竞争力尤为重要,对自动化集装箱码头的需求也就应时而生。
随着信息化水平的提高,仿真模拟技术开始越来越广泛的应用。杨斌等[1]在Flexsim中建立了以码头铁路装卸作业系统为对象的仿真模型,通过对比分析包括设备的利用率、作业效率等仿真结果,对码头的不同的系统配置方案进行分析和优化。陈天沛等[2]使用仿真软件Flexterm建立了以国内某个码头为背景的仿真模型,实现了码头各环节的衔接合作,并通过对仿真结果的分析验证了码头设计的合理性。孙洪运等[3]利用Flexsim CT仿真软件建立了仿真模型,对集卡在作业线和作业面两种作业模式下的优缺点进行了对比,并对其进行了定性和定量两种方法的分析和研究,证明了作业面模式是更优的选择。张程[4]结合仿真软件对数据分析得出的优化的资源配置结果能够有效地提高码头的装卸设备作业效率,为码头的经营者进行决策时提供支持,降低码头的经营成本。侯东亮[5]在Flexsim中建立了以某码头为参考的码头作业系统仿真模拟,通过仿真给出了装卸设备之间的关系,具有一定的应用价值。
本文以国内的自动化码头为参考,基于Flexterm仿真软件设置相关的参数建立模型,对两种布局形式的码头进行基于作业面的仿真模拟,对相关指标进行分析,证明布局对码头作业效率的影响。
2 码头装卸作业分析
2.1 码头布局形式
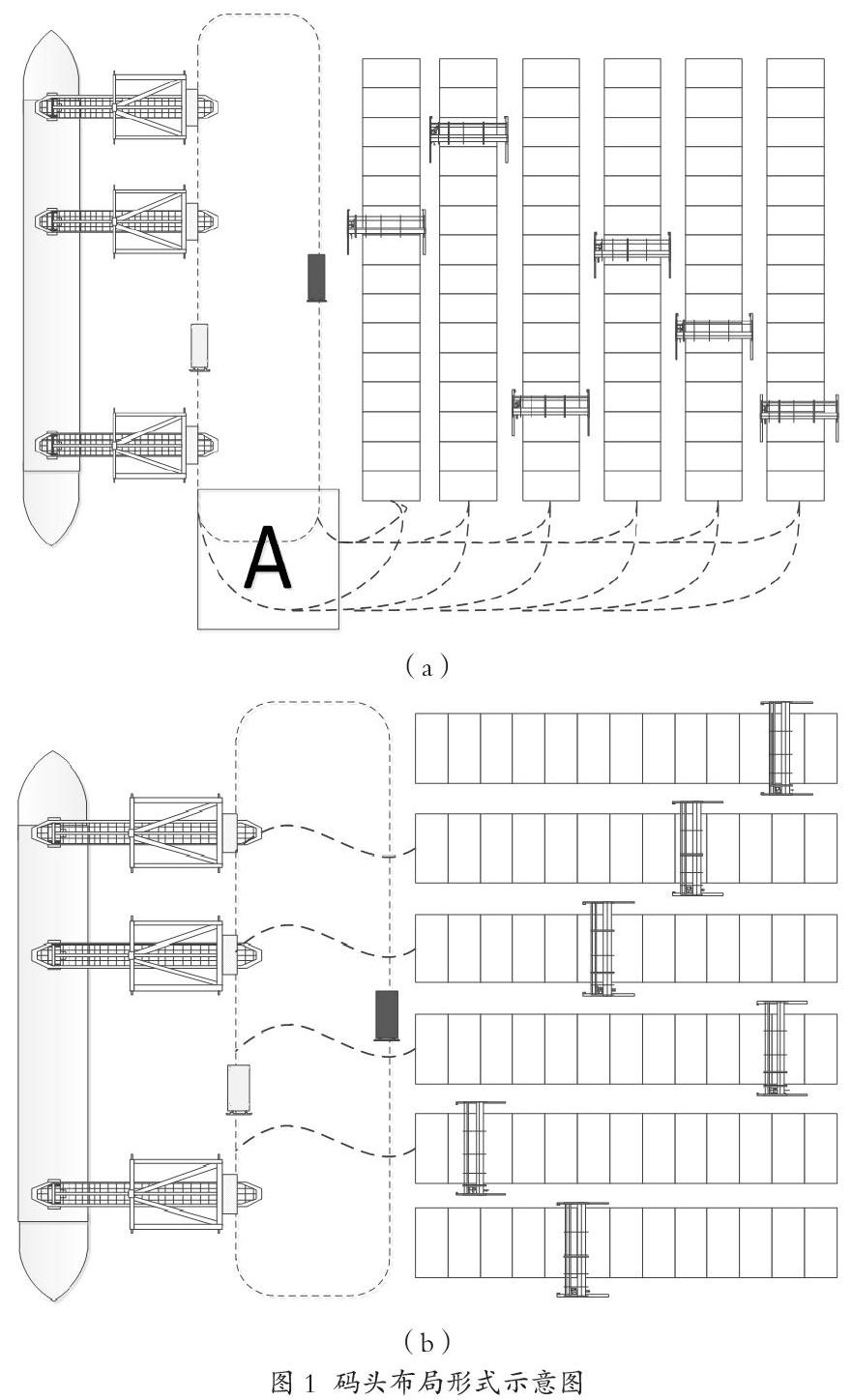
自动化集装箱码头有两种布局形式——水平布局以及垂直布局。目前国内外大部分的自动化码头采用的都是堆场垂直于码头岸线的方式,例如青岛港和洋山港四期码头,位于厦门的远海自动化码头采用的则是水平式布局。
如图1所示,(a)为采用堆场箱区平行于岸线的码头布局形式,水平运输设备运输集装箱任务时必须按照指定的路径才能完成集装箱的运输。每次运输都会经过A区域,极易造成该区域的拥堵,且若要运行至最后面的堆场箱区需要经过的路程最长,水平运输设备的能耗将会增加,完成任务的时间也会加长,造成装卸效率的低下。(b)为采取堆场垂直于岸线的布局形式,堆场箱区位于岸桥与后方交换区之间,海岸线与每个堆场箱区的垂直距离都是相同的,水平运输设备进行集装箱任务运输时的行走路径较短,相对来说路径重叠的部分较少,不容易造成大范围的拥堵,也有利于减少能耗,提高码头的作业效率。
自动化码头的具体布局形式首先应当满足码头的吞吐量并对不同分区进行细致的分解规划;其次,应当根据码头所在的地形等,并结合船舶作业的类型、当地主要进口货物特点以及集疏运的特点等情况进行综合考虑。最终的设计布局需要留下余地,以便在未来进行改进。
2.2 AGV作业模式
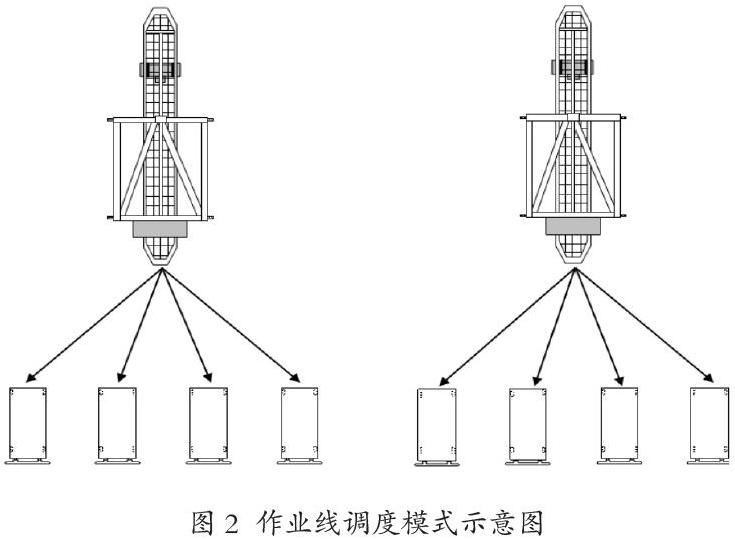
自动化码头AGV的调度作业就是为岸桥从作业船舶上卸下的集装箱任务运送至场桥处以及将场桥从出口箱区吊起的集装箱任务运送至岸桥作业处这两种作业的运输提供最合理的任务分配调度。AGV的作业调度模式根据多台岸桥同时作业时是否同时共享所有的水平运输设备可分为独立调度以及资源池共享调度,即“作业线”和“作业面”者两种调度模式。
集装箱码头在进行装卸任务作业时,通常采用的是“作业线”的调度模式,即每台岸桥都配有几辆固定服务于它的AGV,通常配置的比例为1:4到1:6之间。对于这些AGV来说,它们是固定的服务于这台岸桥的,在这台岸桥的任务没有全部完成之前,它们是无法重新分配给其他岸桥的,即无法接受其他岸桥分配的任务。这种调度模式下,虽然能有效地减少岸桥等待时间,但极易导致AGV的空载等待时间过长,造成水平运输设备资源的浪费。
现在很多港口也开始采用“作业面”的调度模式,在该模式下,AGV不再固定的服务于某一台岸桥,而是将AGV们作为一个资源池中的资源,由一些岸桥共享。AGV的作业区域不再将某一个岸桥作为固定的起点,而是一定位置范围内所有的作业线构成了整个作业面,每一辆AGV可以响应作业面内任意一台岸桥的任务需求,在完成某台岸桥分配的任务之后可以被指派接受作业面内任意一台岸桥的任务分配。“作业面”模式在一定程度上优化了码头的资源配置,减少了AGV的空载等待时间,提高了自动化码头的作业效率。
在自动化码头中,AGV的任务调度过程直接影响着整个码头的作业效率,是码头装卸作业系统中最重要的组成部分,其作业过程受到岸桥与场桥调度作业的约束,主要是岸桥装卸作业船舶的作业约束。采用作业面模式进行运输作业,对AGV的调度进行合理规划,能够使其更加有序、高效地作业。
3 仿真建模
3.1 软件介绍
Flexterm是一款可以用于港口或集装箱码头仿真的模拟仿真软件工具,通过拖放各類实体设施并设置各类参数,例如装卸集装箱的数量、装卸的堆场和场桥参数、集装箱的规格参数等来建成3D集装箱码头仿真环境,每次进行仿真都可以通过3D动画运行、统计报表及图表来进行相关的分析,利用Flexterm可以在实际应用之前先进行仿真模拟,能够更有效地预测和控制码头的实际操作过程。
3.2 建模过程
本文的自动化码头仿真模型主要是以从靠泊船舶到堆场之间的装卸作业开展的,在Flexterm中主要需要对船舶泊位计划、堆场计划以及运输车辆进行相关的参数设置,其作业过程可简单的描述为:船舶到港后,对其进行装卸作业,将进口集装箱从船舶上运至进口堆场,将出口集装箱从出口堆场运送至靠港船舶上。垂直式布局和水平式布局分别参考青岛港以及厦门港,垂直式布局示例图如图4所示:
自动化码头的三维模型实体摆放完成后,还需要对泊位计划、堆场计划以及AGV等其他参与仿真的实体进行参数设置来保障模型能够顺利运行,主要参数设置如表1所示:
4 结果分析
以垂直式布局的仿真模型为例,进口集装箱服从(200,310)随机分布,出口集装箱服从(160,260)随机分布。在运行过程中,选择岸桥以及AGV这两类实体进行分析,分析的结果如图5所示:
从图中可以看出岸桥1等待AGV的时间占总时长的25.9%;岸桥2等待AGV的时间占总时长的30.8%。由此可以看出岸桥的空闲以及等待时间过长,造成了岸桥资源的浪费。从AGV的分析情况来看,几乎所有AGV等待作业集装箱的时间都在40%以上,造成了AGV等待及空载时间过长,利用率严重不足。在模型运行过程中可以看出,岸桥空闲等待时间过长的主要原因是AGV在另一岸桥或在场桥处等待作业的时间过长,导致某一岸桥在提取集装箱后等待AGV作业的时间延长。
两种布局形式的仿真模拟结果数据如下表所示:
由表2数据可知,垂直式的布局形式完工时间小于水平式布局的完工时间,垂直式布局的AGV的整体利用率即AGV的重载率大于水平式布局,垂直式布局的岸桥等待率小于水平式布局的岸桥等待率。由这三个指标来看,垂直式布局的码头优于水平式布局的码头。
5 结论
本文以Flexterm仿真模拟软件为平台,建立了从靠泊船舶到堆场区域的仿真模型,以青岛港和厦门远海的自动化码头布局为参考,通过对两种不同布局形式的码头的多次仿真以及对相关实体的分析对比,证明了垂直式布局的自动化码头优于水平式布局的自动化码头。
参考文献:
[1]杨斌,胡继龙,林意斐.基于FlexSim的集装箱码头铁路装卸线建模与仿真分析[J].港口装卸,2020(01):6-9.
[2]陈天沛,劉庆辉,彭骏骏.基于FlexTerm软件的集装箱码头仿真试验[J].水运工程,2019(09):176-180+226.
[3]孙洪运,郭姝娟,郑彭军.基于Flexsim CT的集装箱码头集卡作业模式比较仿真研究[J].宁波大学学报(理工版),2019,32(01):104-108.
[4]张程,乐婉.基于Flexsim的集装箱码头装卸仿真[J].水运管理,2018,40(08):15-18+25.
[5]侯东亮.基于Flexsim的集装箱码头物流作业系统建模与仿真[J].物流科技,2016,39(12):70-72.
