基于磁感应技术的变电站刀闸位置双确认方案研究
2021-10-15万赟恒赵靖晖陶可鹏
万赟恒 赵靖晖 陶可鹏
摘要:随着电网智能操作模式的推广,变电站刀闸在实现调度遥控操作的同时,要求采用不同源的位置状态双确认技术,从而确保无人在现场观察的情况下刀闸状态能够被正确判断,防止发生刀闸分合不到位的情况。目前,刀闸只有辅助开关接点作为其分合状态的单源状态判据,需要寻找其他不同源的状态确认技术进行辅证。为解决上述问题,提出了基于磁感应技术的变电站刀闸位置双确认方案。
关键词:智能操作;不同源;双确认技术;刀闸状态
0 引言
随着电网智能操作模式的推广,变电站刀闸在满足远方遥控操作需求的同时,要求至少有两个非同样原理或非同源指示发生对应变化,且所有这些指示均已同时发生,才能确认刀闸已操作到位,从而确认无人在现场观察的情况下,刀闸状态能被正确判断,防止刀闸分合不到位的情况发生。目前刀闸已在机构辅助开关节点获取分合闸位置的第一判据,但另一方法的第二判据并未设置,因此,急需一种与辅助节点非同样原理或非同源指示的刀闸位置确认方法,以满足刀闸位置状态双判据确认的遥控操作要求[1-3]。
1 目前研究现状
目前刀闸位置状态第二判据确认的研究主要有现场图像监控识别、姿态传感器等方案。图像监控识别现已在一些变电站进行试用,但该方案需装设较多摄像头,存在成本高的问题,且户外环境摄像头拍摄图像容易受环境影响,再加上故障率高,维护量大,因此并不适用于户外刀闸。另有姿态传感器方案,但是姿态传感器电缆随机构转动,易缠绕在机构连杆上,存在数据漂移的现象,应用效果不佳。考虑到户内外运行环境,敞开式、GIS设备隔离开关类型多样,且刀闸分合闸到位后需信号自动上传,无须人工干预或人工二次判断等因素,计划使用磁感应传感器方案作为刀闸分合到位状态判断的另一种技术源。
2 双确认方案
本文采用的磁感应传感器包含永磁铁与磁感应器件,其中永磁铁通过安装附件固定在刀闸机构运动部件上(水平式刀闸瓷瓶底座、垂直式刀闸竖直传动杆、GIS三相刀闸连杆拐臂、GIS刀闸机构箱分合闸指示球等);磁感应器件通过安装附件固定在刀闸本体静止部件上,至少包含两个磁感应器件,分别进行分位、合位到位检测。磁感应器件安装附件根据刀闸设备结构可进行定制化设计,将刀闸的状态传输至调度信号后台。
2.1 方案技术原理
(1)磁感应原理:基于磁感应器件对特定磁场的开关敏感特性,当特定磁场以特定的方向接近(非接触)磁感应器件时,磁感应器件就会感应到此磁场的存在;当特定磁场强度达到磁感应器件的动作值时,磁感应器件实现由分到合的动作,检测动作范围要求精确到±2 mm。
(2)磁感应传感器工作原理:如图1所示,磁感应传感器包含永磁铁与磁感应器件。其中永磁铁通过安装附件固定在刀闸机构运动部件上(水平式刀闸瓷瓶底座、垂直式刀闸竖直传动杆、GIS三相刀闸连杆拐臂、GIS刀闸机构箱分合闸指示球等);磁感应器件通过安装附件固定在刀闸本体静止部件上,至少包含两个磁感应器件,分别进行分位、合位到位检测。磁感应器件安装附件根据刀闸设备的结构可进行定制化设计,以满足不同刀闸的状态检测需求。
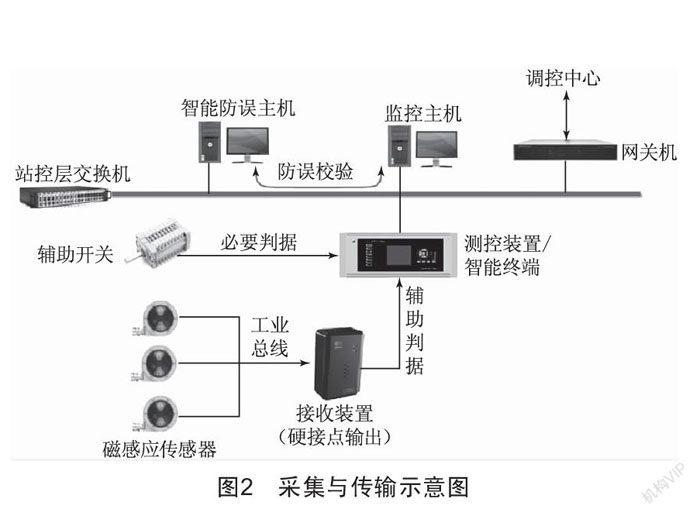
(3)采集与传输方案简述:如图2所示,刀闸状态采集装置主要包括磁感应传感器和接收装置,磁感应传感器通过工业总线方式将刀闸分合位置信息传输至就地接收装置,接收装置经过融合判别后,将刀闸状态(分合到位、分合异常)以无源接点方式输出至该间隔测控装置(或智能终端),测控装置(或智能终端)同时采集必要判据与辅助判据并进行上送。
2.2 技术关键点及创新点
(1)非接触式检测:本设计方案磁感应传感器为非接触式检测,刀闸机构转动部件上无电缆连接,杜绝了因电缆甩动缠绕刀闸机构的隐患。
(2)可靠性高:本设计方案为提高产品的可靠性,其所采用的磁感应传感器的故障率低于0.005%。
(3)檢测精度高:当磁钢附件做直线运动时,检测精度为±2 mm(静态);当磁钢附件做旋转运动时,检测精度为<0.5°(静态)。
(4)抗干扰能力强:磁感应传感器吸合、释放不受现场强放电、强磁场影响,抗干扰能力满足现场应用要求。
(5)适应性强:磁感应传感器结构紧凑,安装方式多样,可适用于不同的刀闸机构。
3 安装方案
本方案是在110 kV ××变电站智能化图像监控识别功能基础上的完善研究。在110 kV ××线线路侧刀闸处安装磁感应传感器采集刀闸状态,状态信号上传至主控室线路测控屏的110 kV ××线测控装置,给调度提供刀闸状态二次确认,实现调度端程序化操作。
计划实施的刀闸双确认工程如下:
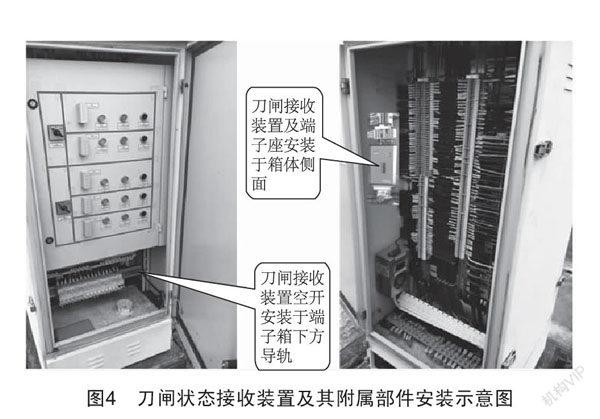
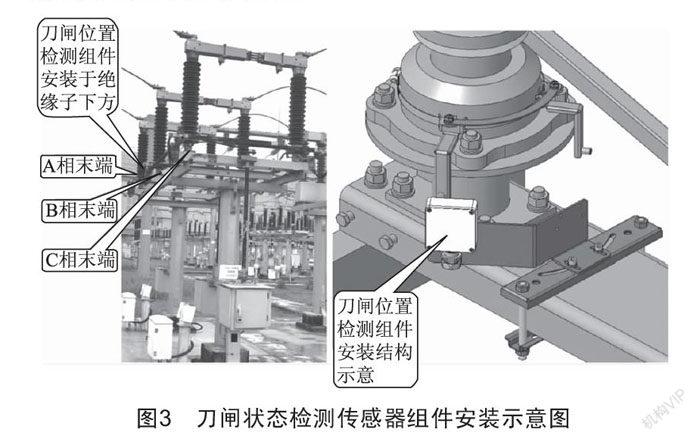
(1)刀闸状态采集使用磁感应方式,如图3所示,传感器组件安装于110 kV ××线线路侧刀闸传动轴末端绝缘子下方金属支架上,A、B、C三相各装一组,共3组传感器;如图4所示,刀闸状态接收装置安装于××线端子箱后门内左侧以及下方导轨上。
(2)刀闸状态检测传感器组件与接收装置之间走线采用带铠电缆,电缆由刀闸绝缘子下方沿刀闸支柱往下入电缆沟,经电缆沟走线至端子箱,其中刀闸段电缆外露部分采用不锈钢金属包塑软管保护,提高电缆防护性。
(3)刀闸状态接收装置处理前端刀闸位置信号后上送至主控室的线路测控屏。刀闸状态接收装置开出信号为4路,分别为合位、分位、异常、COM。
(4)刀闸状态检测传感器与接收装置连接采用4芯0.3 mm2阻燃屏蔽电缆;接收装置与测控柜连接采用6芯1.5 mm2阻燃双绞屏蔽电缆;接收装置上传信号为硬接点开出,采用110 V或220 V电压。
4 结语
本文提供的变电站刀闸位置双确认方案,是在调度程序化操作过程中对刀闸状态的多源判据采用“必要判据+双判据辅助判据”来确认结果,以满足刀闸位置状态双确认的要求,可电动化、遥控化操作多源判据支撑质量检查功能,达到完全交由各类智能终端或系统执行、现场操作完全无人干预的要求。
基于磁感应技术的变电站刀闸位置双确认方案可确保无人在现场观察的情况下,刀闸状态能够被正确判断,防止出现刀闸分合不到位的情况,提高了设备运维安全性和供电可靠性,值得在电网系统内全面推广。
[参考文献]
[1] 王晓祥.智能变电站顺控操作模式的构建与实施[D].济南:山东大学,2020.
[2] 郑小革,高超,周凡,等.变电站一键顺控改造方案研究及实施[J].电网与清洁能源,2019,35(12):37-42.
[3] 李鑫.适应泛在物联的变电站智能化改造方法研究[D].济南:山东大学,2019.
收稿日期:2021-06-07
作者简介:万赟恒(1996—),男,广东江门人,变电检修高级工,主要从事110 kV及以上变电站一次电气设备的检修、维护工作。
