用于光电望远镜机械谐振抑制的控制算法
2021-10-15马文礼周文琳钱俊璋
李 欣,马文礼,周文琳,罗 君,钱俊璋
(1.中国科学院光电技术研究所,四川 成都 610209;2.中国科学院大学,北京 100049)
0 引 言
光电望远镜是一种精密光学仪器,广泛应用于天文学、航空和航天技术等领域。伺服控制系统是光电望远镜的重要组成部分,而望远镜机械系统的低频机械谐振制约着望远镜伺服控制系统跟踪精度和抗干扰性能的提升[1],例如VLT望远镜的轴系机械共振频率为7.2 Hz[2]。一般而言,控制系统的速度环的带宽只能是机械谐振频率的1/3~1/6[3]。
除机械谐振外,控制系统还会受到死区、摩擦、风扰[4]等的各种干扰。为了抑制这些干扰,人们又提出了各种控制方法,包括LQG[5]、SMC[6]和H∞[7]控制等,然而这些控制算法不便于调试,没有得到广泛应用。在众多方法中,加速度反馈法既能抑制机械谐振,又能提高抗干扰性能,实际运用较多。
自抗扰控制(active disturbance rejection control,ADRC)由韩京清研究员提出[8],经线性化后,得到广泛的应用。该方法将机械谐振、死区、摩擦、风扰等各种干扰统一当作“总扰动”来处理,通过扩张状态观测器(ESO)来观测和补偿总扰动,使被控对象趋近于理想的被控对象,控制器设计变得简单。文献[9~11]采用ADRC实现了控制系统的带宽超过机械谐振频率,结果表明ADRC抑制机械谐振的效果比加速度反馈法好,是机械谐振抑制的新方法。
1 望远镜控制系统模型
望远镜控制系统有两个自由度,即方位轴系和俯仰轴系,如图1所示。方位轴系和俯仰轴系都由永磁同步电动机、编码器和电机驱动器组成。
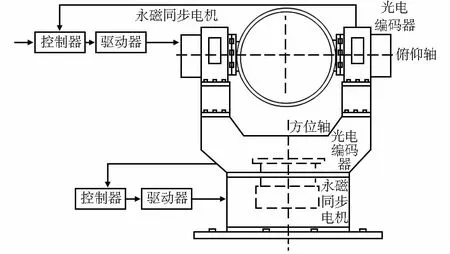
图1 望远镜控制系统结构
望远镜轴系可以简化为二质量模型进行分析[12]。设电机的转动惯量为JM,负载的转动惯量为JL,轴系的刚度系数为Ks,阻尼比为bs,TM为电机产生的扭转力矩,ωM为电机转速。电流环简化为电机的力矩常数kT,则对应系统的数学模型为
(1)
方程(1)的反谐振频率和谐振频率分别为
(2)
当低频段时s→0,JM和JL之间的连接可以看作是纯刚性连接,式(1)可以近似为
(3)
当高频段时s→∞,JM和JL之间的连接为柔性连接,JL无法跟随输入,相当于负载与电机之间被脱开。式(1)可以近似为
(4)
从图2可以看出,系统在反谐振频率处系统的幅值迅速衰减,相角迅速增大为超前相角。在谐振频率处幅值迅速增大,而相角迅速减小,导致系统的带宽无法提升。曲线l1和l2之间的间距的大小由JM和JL的比重决定,JL比重越大,幅频曲线在高频段抬升越多,控制难度越大。
2 控制算法设计
本文采用传统的串级控制结构,位置环采用分段式控制器,速度环采用ADRC,为进一步提高跟踪精度采用了速度前馈控制。
1)位置环控制器设计
为了减小超调,提高系统的快响性,在位置控制器采用了分段式PI控制器,算法如式(5)所示
(5)
式中Error为位置误差,Kp1为误差大于等于0.5时比例环节系数,Kp2为误差小于0.5时比例环节系数,Ki为积分环节系数。
2)速度环ADRC控制器设计
根据式(1)可以得出如下公式

(6)
将式(6)两边同时进行两次积分可以得到
y′=b0u+f(·)
(7)
其中,b0=kt/Jm,

将式(7)写成状态空间的表达形式为
(8)
将式(8)再扩展一维可以得到

(9)

(10)
(11)
3)抑制机械谐振原理分析与对比
首先对ADRC抑制机械谐振的原理从频域的角度进行分析,其次将其与加速度反馈法进行对比阐述其独特的工作原理。
速度环ADRC原理框图如图3所示,系统受到的“总扰动”被通过反馈进行补偿,修正了原始被控对象。

图3 速度环ADRC的原理框图
当b0=kt/JM时,根据Mason增益公式可以得到
(12)

图4 被ESO补偿过后的被控对象与原始被控对象的波德图
加速度反馈法是抑制机械谐振常用的手段之一,理想的加速度反馈法的原理框图如图5所示,其中加速度计用微分加二阶低通来代替,JMest和kTest分别为JM和kT的估算值,r为加速度计的带宽,a为反馈增益。

图5 理想的加速度反馈
由图5可以得到
(13)

图6 加速度反馈法抑制机械谐振的原理
从图3和图5的对比可以看出:aESO和aAFC是相等的。其区别是ESO从aESO(总加速度)中减去了au(控制量所产生的加速度),将au看作是“已知加速度”,将aESO-au作为系统所受到的“总扰动”进行补偿,将整个控制信号分成了“控制量”和“扰动补偿量”两个通道,简化了控制器设计。因此,ADRC与加速度反馈具有一定的相似性。
通过图4和图6的对比可以看出:采用ESO与采用加速度反馈法抑制机械谐振的原理不同。ESO抑制机械谐振的原理是“虚拟的”降低了负载端的转动惯量,抬升了幅频曲线低频段的幅值。加速度反馈法抑制机械谐振的原理是“虚拟的”提高了电机端的转动惯量,压低了幅频曲线高频端的幅值。因此,ADRC是一种独特的机械谐振抑制方法。
3 实验与结果
为了验证以上控制算法,本文搭建了由一台小型望远镜、电机驱动器和望远镜控制单元组成的实验平台,系统采样率为1 000 Hz。图7为实测与辨识轴系波德图。

图7 实测被控对象模型与拟合模型
本文对PI和ADRC的速度环频率特性进行了对比,响应的波德图如图8(a)所示。由图8(a)可知PI和ADRC的速度闭环带宽分别为32 rad/s和48 rad/s。根据文献[11]的研究结果,望远镜速度环带宽可以更高,但是由于采用的是电机端反馈,会导致电机端和负载端无法同时稳定。为了降低负载端的振动,没有进一步提高速度环的带宽。位置回路闭环波德图如图8(b)所示。ADRC和PI的位置闭环带宽分别为30 rad/s和22 rad/s。望远镜速度环闭环阶跃响应如图8(c)所示,可以看出ADRC算法的速度环响应速度更快,且无超调。望远镜位置阶跃响应如图8(d)所示。速度环采用ADRC后,位置环的带宽得以提高。速度闭环跟踪正弦信号的误差如图8(e)所示,ADRC速度跟踪效果也好于传统PI控制器。位置闭环跟踪正弦信号的误差如图8(f)所示,本文提出的控制算法误差减小了10.3″(PV),具有更好的跟踪性能。

图8 速度环和位置环的实验结果
4 结 论
本文提出了一种高精度光电望远镜的控制算法,该控制算法采用了串级结构,结合了分段式PI,ADRC及前馈控制三种方法。并从频域角度探讨了ADRC抑制机械谐振的原理,分析得出该方法能够有效抑制低频中段的机械谐振。对于高频段的机械谐振,ADRC的抑制效果有限。最后,在实际望远镜上验证了该控制算法的有效性。
