细分驱动对三相混合式步进电机牵出转矩的影响
2021-10-15姚凯伦
姚凯伦,毕 超
(上海理工大学 机械工程学院,上海 200093)
混合式步进电机具有高分辨率、高转矩和控制简单等特点[1],被广泛应用在许多产品中,例如办公室用设备、计算机周边设备、医疗仪器以及航天航空和雷达控制系统。混合式步进电机通常被用于进行位置控制[2],其运行速度通常比较低,一般不超过1 000 r·min-1。
步进电机的“牵出转矩[3]”是指电机处于恒速运转下最大不失步转速时的输出转矩,反映了混合式步进电机的动态转矩特性和带载能力。为了获得更高的工作效率,通常希望混合式步进电机能够在同样的转速下产生较高的有效电磁转矩,以便在高速下驱动较大的负载。然而,如果负载转矩超过了电机的有效电磁转矩,电机就会发生失步现象,继而导致电脉冲信号和角位移无法对应,发生不可控制并产生测量误差。因此,实际应用中通常步进电机的牵出转矩越大越好[4]。
步进电机的牵出转矩不仅与电机的电磁结构和使用的材料有关,也与驱动模式有关。本文着重分析三相混合式步进电机的牵出转矩与细分驱动模式之间关系。同时,将具有同样参数的三相和二相混合式步进电机进行对比,观察两者牵出转矩的差异。最后,采用用实验对仿真结果加以验证。
1 三相混合式步进电机仿真模型
为了分析细分驱动模式对三相混合式步进电机的影响,本文建立了一个电机仿真模型[5],其结构如图1所示。
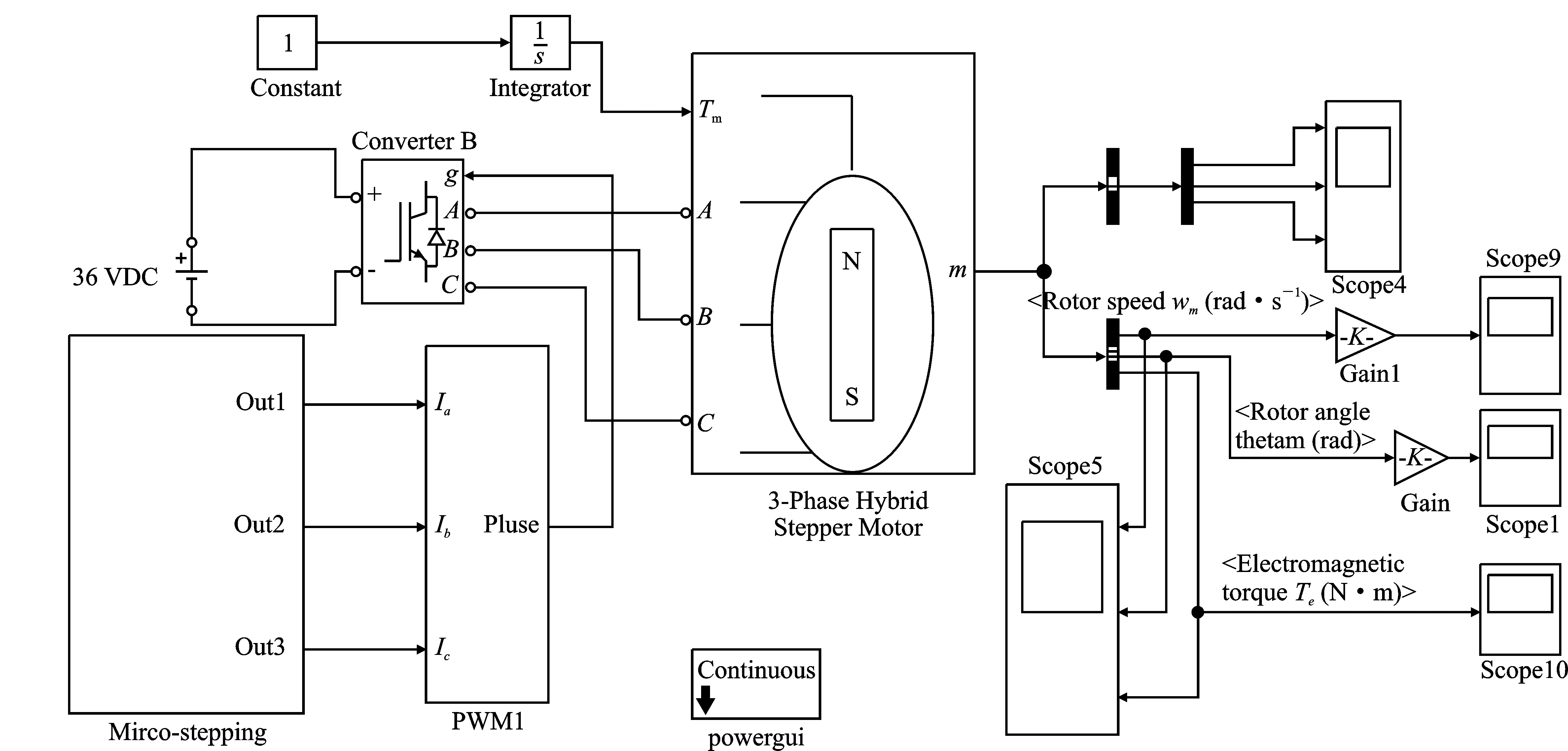
图1 三相混合式步进电机仿真模型
该三相混合式步进电机仿真模型由4个单元组成,分别是细分模块、PWM模块、逆变器和电机本身[6-7]。在细分模块中,可以设置细分数和每秒的电脉冲信号数。三相混合式步进电机的转速和细分数及每秒的脉冲信号数有关[8]。转速如式(1)所示。
(1)
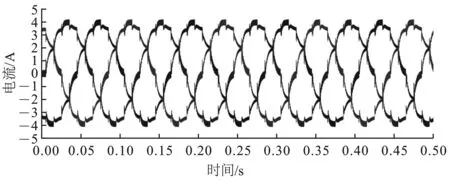
式中,n为电机转速,单位为r·min-1;f为控制脉冲频率,代表了每秒的电脉冲信号数量;θs为电机的固有步距角(本文所分析的三相混合式步进电机来说,θs是1.2°);x是细分倍数(整步情况下x=1)。在以下内容中,N细分意味着式(1)中的x为N。图2显示了半步和4细分运行时的电机电流波形。
(a)
2 细分驱动模式对牵出转矩的影响
为了分析驱动模式对步进电机的牵出转矩的影响,本文首先使用仿真方法对三相步进电机和二相步进电机都进行了分析和比较[9]。在仿真实验中,首先进行了空载时的细分驱动的情况,将细分数从整步运行一直增加到12细分;然后在加负载的情况下,分别观察相同细分数下,不同转速以及相同转速的运行中三相混合式步进电机牵出转矩的变化状况;最后进行二相混合式步进电机仿真,与三相的牵出转矩做比较。
2.1 细分驱动对角速度稳定的改善
N细分是将驱动电机的相电流按照三相对称正弦的分布,划分为阶梯状的N步。随着细分数N的增加,每进行新一步驱动,相电流的调节量或电流的突变量得以减少。这样可以使电磁转矩的突变量减小,电机运行平滑,并有效减少转子围绕着平衡点的振动[10]。
图3展示了从整步到12细分情况下电机角速度的波动情况。此时,电机处于空载状态。调整脉冲频率,电机转速设置为20 r·min-1。
(a)
对比图3的结果,可以得到以下结论:(1)从整步到12细分的角速度波形图中,可以看到电机转速的平衡点在20 r·min-1,而转速的波动就是围绕着这个平衡点的转速进行的;(2)从整步到半步再到4细分,三相混合式步进电机角速度的波动情况有明显的改善,细分数越多,电机转速越平稳;(3)从6细分到12细分,角速度波动随着细分数的增加而得到的改善较小。因为在细分数较大时,每一微步电机相电流的改变非常的小,并且相电流波形已经接近正弦。所以,当细分数N增加到一定大的值,再继续增大N,角速度的波动的改善就不再明显。
2.2 相同转速下不同细分驱动对牵出转矩的影响
在图4所示的仿真过程中,负载的转矩TL被设置成随着时间的增加而上升,即
TL=k·t
(2)
式中,t是时间;k是转矩比例常数,在此次仿真中k设置为1。
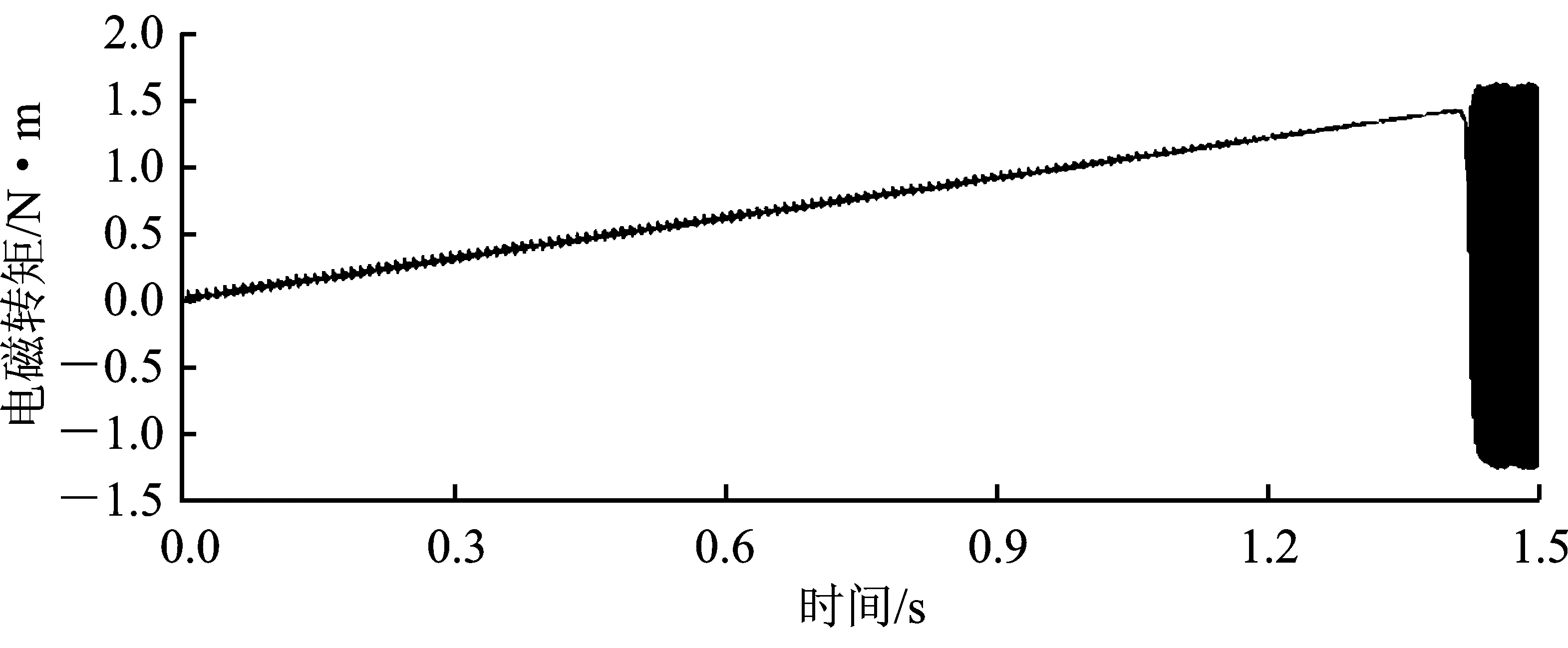
图4所示是6细分情况下三相混合式步进电机的由仿真所得到的电机的电磁转矩波形 (转速被设定20 r·min-1)。
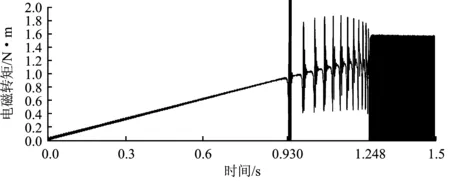
图4 6细分时电机的电磁转矩
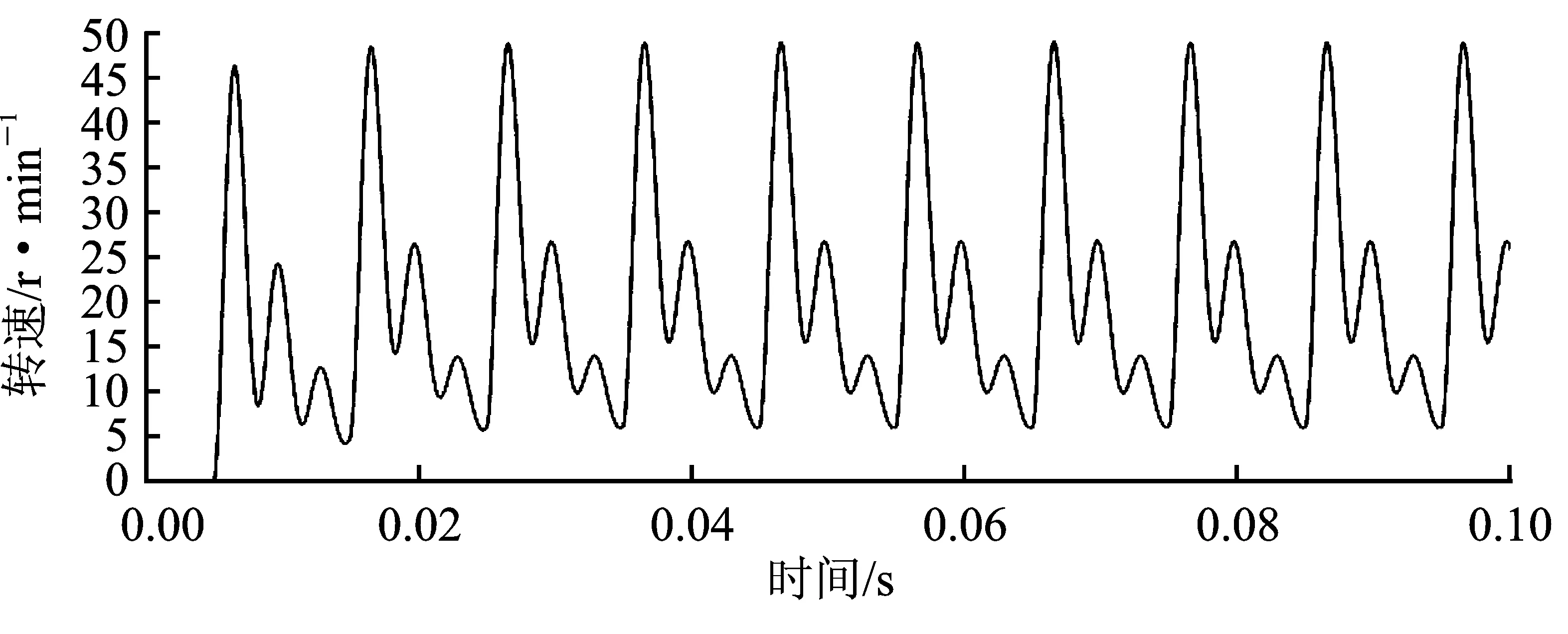
在0.93 s时,电机的输出电磁转矩有一个大的波动,并且在1.248 s时,波形完全失真。图5为6细分情况下电机角位移波形图,可以得知在0.93 s时,三相混合式步进电机的角位移开始下降。这说明此时电机的旋转无法与电脉冲信号对应, 而在图6可以看出电机此时旋转在恒定的转速20 r·min-1[11]。由这些判定,电机在0.93 s的时候失步了,此时电机的输出电磁转矩就是失步转矩为0.93 N·m。
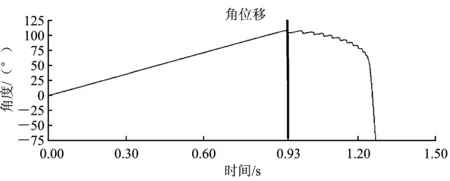
图5 6细分时电机角位移
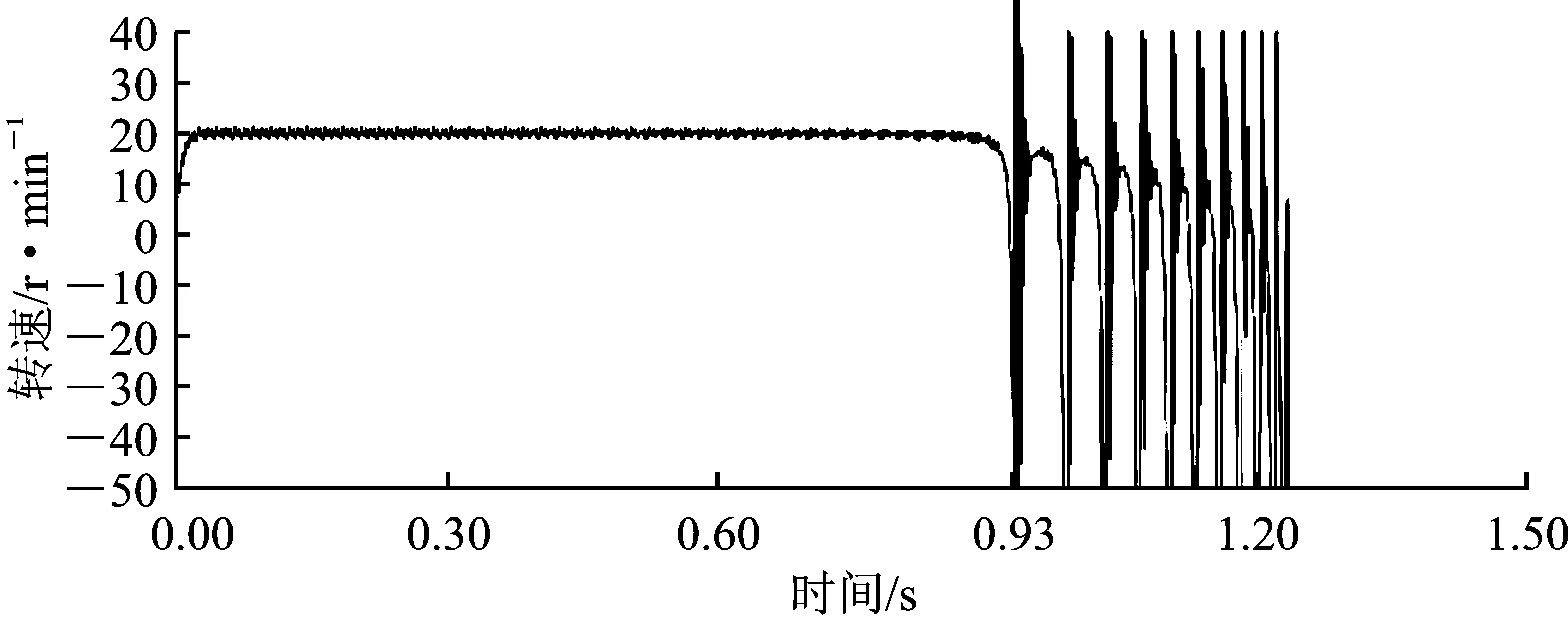
图6 6细分时电机转速
由此,可以得到其他步细分情况下的牵出转矩数值,如表1所示。从整步到半步再到4细分,牵出转矩有明显的提升。但是从4细分开始,一直到12细分,牵出转矩的提升几乎是不可见的。这是因为,随着细分数的增加,电机相电流变得更接近正弦波。然而到了一定程度,无论细分数如何增加,相电流的波形变化很小,并反映在很小的牵出转矩的变化上。
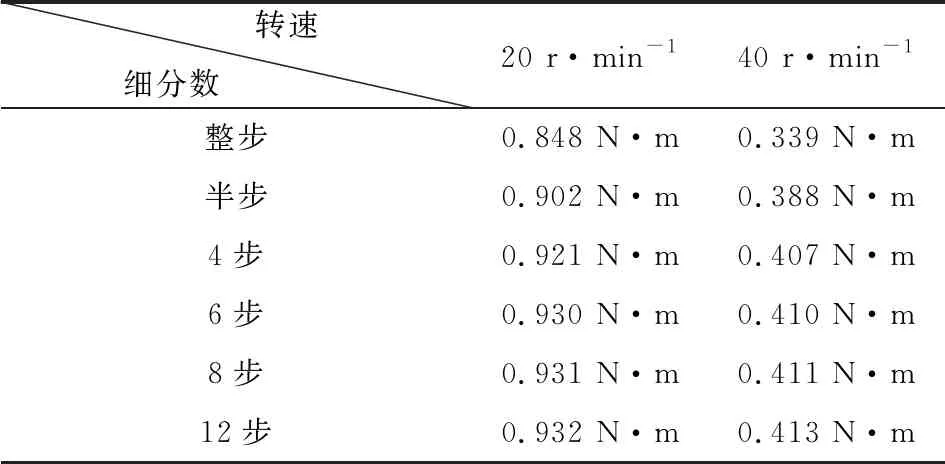
表1 相同转速不同细分数的牵出转矩
2.3 不同转速下相同细分驱动对牵出转矩的影响
细分数保持不变,改变每秒的电脉冲信号数可改变电机转速。对于一个三相混合式步进电机来说,6细分情况下的相电流波形已经非常接近正弦波,因此其他速度下的仿真实验都基于6细分。图7分别展示了6细分不同转速情况下电机的牵出转矩。可以看出,随着转速的增加,牵出转矩明显降低,并最终达到0。
(a)
其他转速情况下的牵出转矩都被记录在了表2中。在这个表中,记录的数据是每秒电脉冲数,但利用式(1)可以得知相应的电机转速。
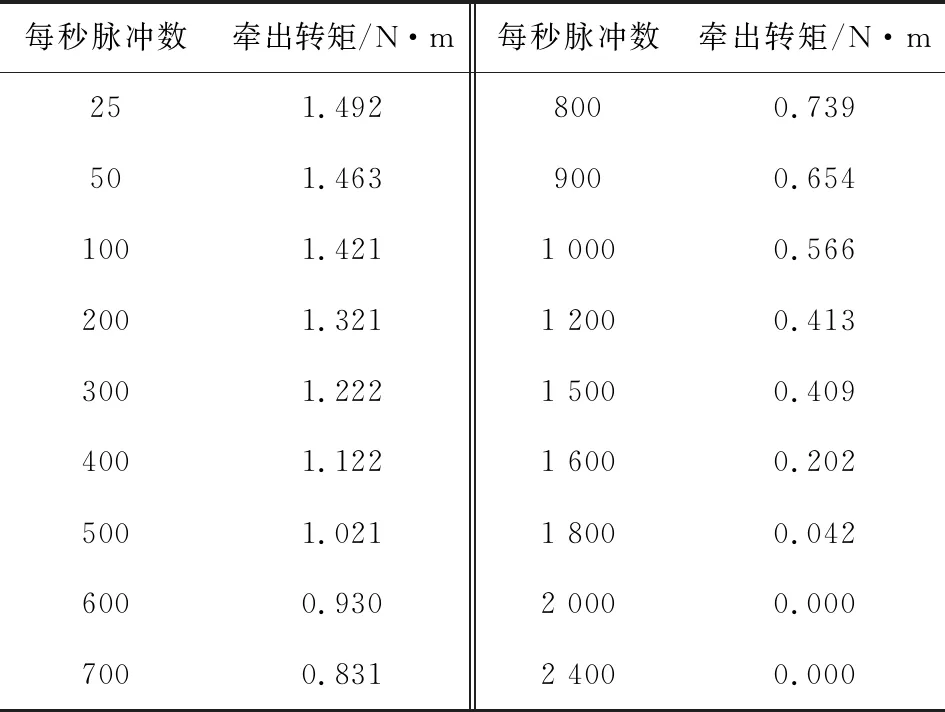
表2 不同的每秒脉冲数和牵出转矩的关系
图8展示了相同细分时电机转速和牵出转矩之间的关系。
2.4 二相混合式步进电机的牵出转矩
为进一步了解细分驱动对不同相数的混合式步进电机的影响,本文搭建了相混合式步进电机的仿真模型[12], 并在将参数设置成与三相电机相同后进行仿真。在仿真中,选择驱动电流,使得二相步进电机的平均电磁转矩与上述三相步进电机相同。将仿真结果与相同转速和细分数下的三相混合式步进电机进行比较,并将数据列入表3。
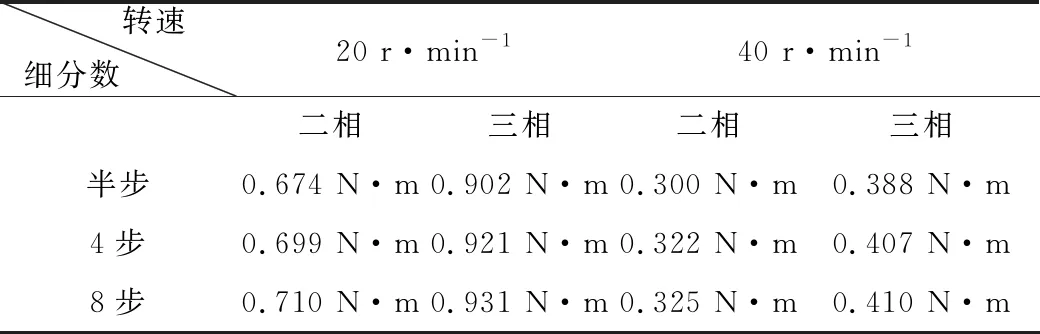
表3 两种混合式步进电机牵出转矩的比较
通过仿真结果可以看出,二相混合式步进电机的牵出转矩变化趋势和三相混合时步进电机的变化趋势式是相似的。同时,在同样电机参数和同样转速以及细分数下,三相混合式步进电机的牵出转矩比二相混合式步进电机有显著的提升。这是因为,在同样的细分数下,三相混合式步进电机的转角变化更加小,也就是突变量较小。因此,在同样的电机参数下,三相混合式步进电机在牵出转矩上的性能优于二相混合式步进电机。
3 实体步进电机实验
3.1 电机空载转速的测量
为了验证仿真结果的正确性,需要对二相和三相混合式步进电机在实际运行状态下的牵出转矩特性进行分析。但是,直接对牵出转矩波形的测量较为困难的[13]。因此,本文采用了间接测量的方法[14],在空载情况下分别测量电机在不同细分数驱动下的最高空载转速。能够实现的空载转速越高,说明正常运行的时候牵出转矩越大。
本文在图9所示测试平台上进行实验。分别测量了两台规格不同的二相和三相混合式步进电机在不同细分数下的最大空载转速,结果如表4和表5所示。电机驱动器的细分数、转速和控制脉冲的增加量均为可控的, 电机的转速可以得到准确地测量。电机控制器以设定好的初始转速运转,通过脉冲控制器,逐渐增加电机转速,直至电机失步。测速仪能准确测出电机的最大空载转速,而控制器也能通过脉冲频率直接读取电机正常运行时的转速。实际上,出现失步时,电机的声音会发生突变,因次比较容易辨别并抓到电机出现失步的转速。
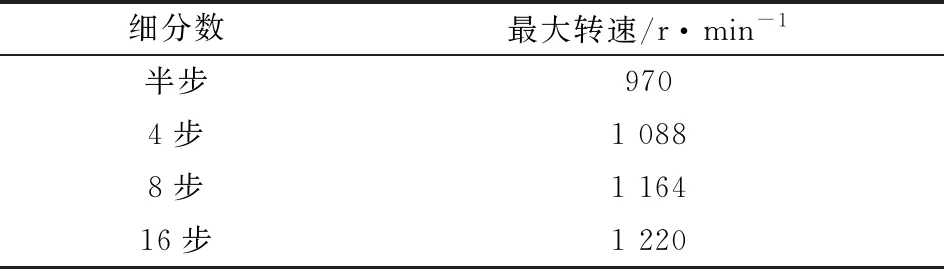
表4 二相混合式步进电机最大空载转速
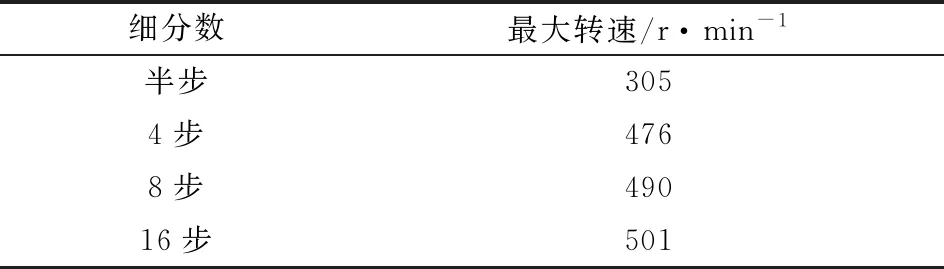
表5 三相混合式步进电机最大空载转速
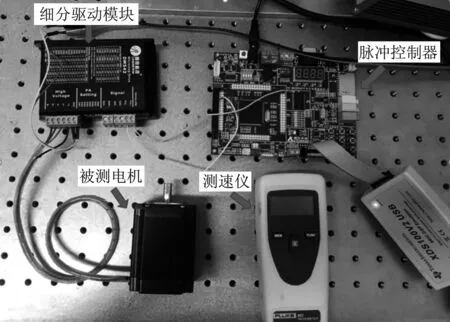
图9 空载转速测试平台
因为实际的二相和三相混合式步进电机无法做到参数完全相同[15],所以两者的最大转速有明显的差别。但是从表中可以看出,无论是二相还是三相混合式步进电机,随着细分数的增加,电机的最大空载转速也变大。由于细分能够使电流趋近正弦,电磁转矩的脉动分量也就减少,电机的运行较为稳定,牵入转矩得以提高,空载的最高转速也得以提高[16]。但是,另一方面,随着细分数的增加,最大空载转速的提升量逐渐减少。
3.2 电机电流波形的测量
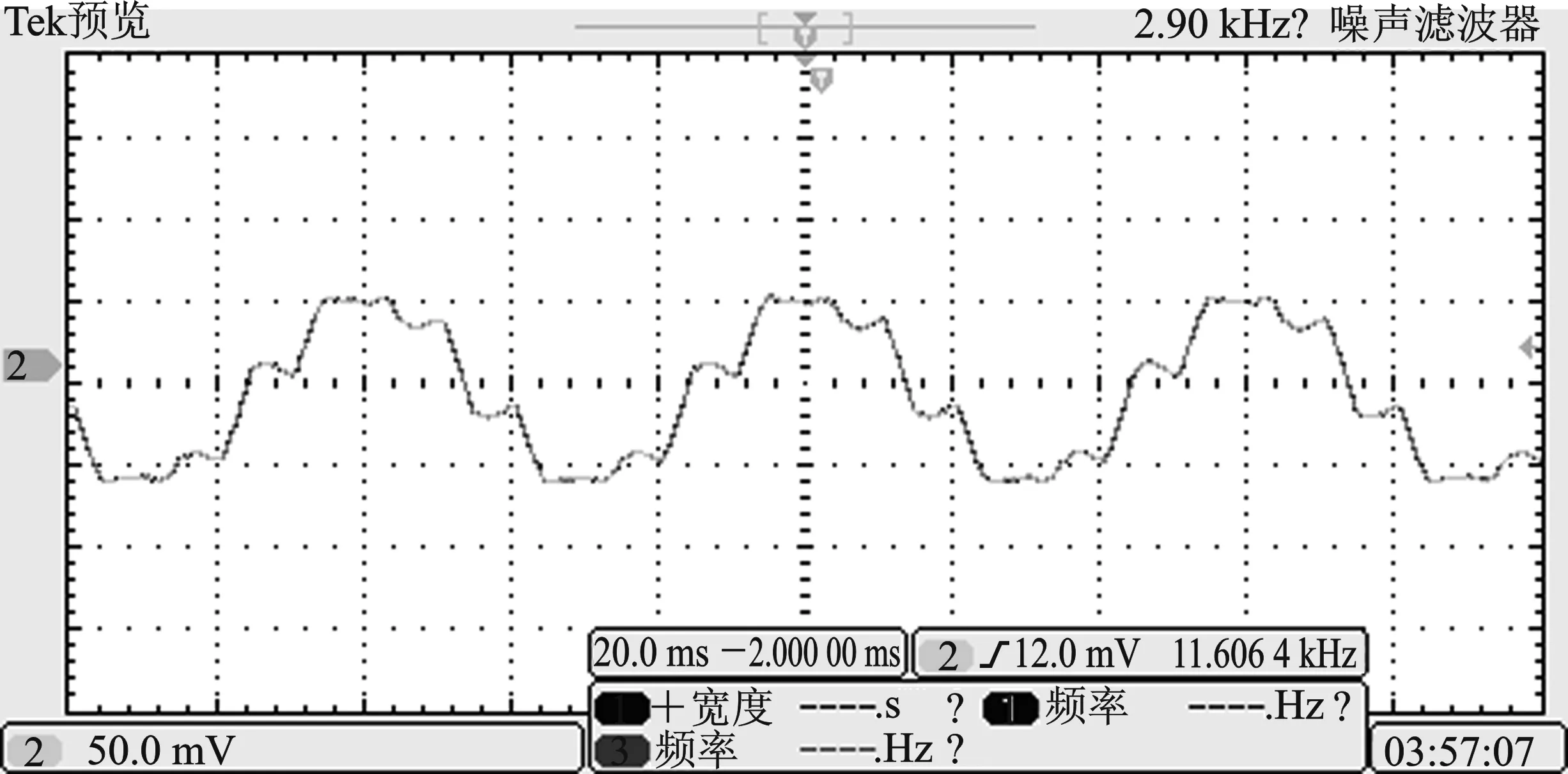
电机控制器以设定好的转速运转,改变电机驱动器的细分数,用电流钳测量不同细分数下三相混合式步进电机的相电流波形,如图10所示。
(a)
从图10可以看到,整步运行时,电机的相电流波形有明显的阶梯状细分。半步运行时,电流波形还是能看出较小的细分痕迹。到了4细分时,电流波形已经非常光滑,接近正弦波。到了8细分时,电流波形已经看不出相较于4细分时的改善。
由此可知,随着细分数的增加,相电流波形越来越接近正弦,但是当细分数达到一定程度,再对电流波形进行更小的划分,每一微步的电流变化已经很小,最大空载转速的提升量逐渐减少,并且对改善电磁转矩脉动的作用有限。所以最大空载转速的增加也随之减小,并进一步体现在电机牵出转矩上面。
仿真模型在牵出转矩分析上的准确性被实验结果所验证。从中可以清楚地了解到细分驱动模式对混合式步进电机牵出转矩的影响。从仿真和实验中都可以看出,细分驱动模式有助于提高电机的牵出转矩,但细分数大于8后,继续增大细分数对电机的牵出转矩的影响较小。
4 结束语
本文采用细分驱动模式,可以提高二相和二相混合式步进电机的牵出转矩,尤其是对三相混合步进电机。但当细分数到达了一定程度,电流与转角的关系已经接近对称的二相正弦,细分数的继续增加对牵出转矩的改善就不再明显。同时,相同规格的二相混合式步进电机比二相混合式步进电机能够产生更大的牵出转矩。这说明了二相混合式步进电机在许多应用中的重要意义。仿真和实验结果都表明,在相同细分下,如果驱动电压保持恒定,混合式步进电机的牵出转矩会随着转速的增加而减少。这些结果对于高性能步进电机驱动系统的研究,以及更加有效地应用步进电机,特别是三相混合式步进电机,具有一定的现实意义。
