移线工况下考虑抖动的摩托车前悬架优化分析
2021-10-15冉险生赵洪亮
冉险生,罗 领,赵洪亮,陈 凯
(1.重庆交通大学 机电与车辆工程学院, 重庆 400074;2.重庆宗申创新技术研究院有限公司, 重庆 400054)
1 引言
摩托车的行驶稳定性是摩托车动力学研究最重要的组成部分之一,其优劣关系到驾乘人员的安全性。前悬架系统参数的合理匹配直接关系到摩托车的行驶稳定性,调校出优秀的前悬架系统能整体提升车辆的行驶动态性能。
国内外学者对摩托车的动态行驶性能进行了大量的研究。SHARP[1]首次针对摩托车建立了二自由度线性模型和运动方程,将摩托车的动态行驶性能用抖动(wobble)、摇摆(weave)和倾覆(capsize)3个指标进行描述。冉险生等[2]提出一种前悬架优化方案,提升摩托车在直线运动工况下抖动模态的稳定性。RAMIREZ等[3]对3种不同结构形式的前悬架进行分析,并利用根轨迹图进行对比。徐中明等[4-5]将车辆悬架相关参数为优化设计变量,实现车辆多目标优化,用以提升车辆动态行驶性能。EVANGELOU等[6]通过对机械转向补偿器的研究,探索其对摩托车前悬架系统抖动的影响。SIMONE PIANTINI等[7]介绍了一种新型摩托车半主动转向阻尼器,利用磁流变液实现可变转向阻尼,以改善前悬架的抖动,提升车辆行驶的稳定性。COSSALTER等[8]通过实验研究摩托前叉静态和动态的形变性能,来说明车前车架对抖动与摇摆影响。
综上可知,现今国内外对摩托车大多对某单一参数进行优化,或在直线行驶状态下进行研究。在此研究基础上,以某一摩托车为研究对象,通过BIKESIM完成车辆动力学建模及仿真,以表征抖动的转向系质心位置侧倾角和转向系横摆角速度为优化目标,对车辆前悬架相关设计参数进行灵敏度分析,以分析结果作为指导依据完成在移线工况下的多目标优化,再根据优化结果建模、仿真,最后根据优化结果前后对比验证设计方案的合理性。
2 车辆建模与仿真
以某国产摩托车为研究对象,根据三维数模及设计书取其主要设计参数如表1所示。

表1 车辆主要设计参数
2.1 模型建立及边界条件设置
将整车分为车身、转向系统、前悬架系统和后悬架等6个子系统,在摩托车动力学分析软件BIKESIM中建立车辆模型,其整车参数模型如图1所示。
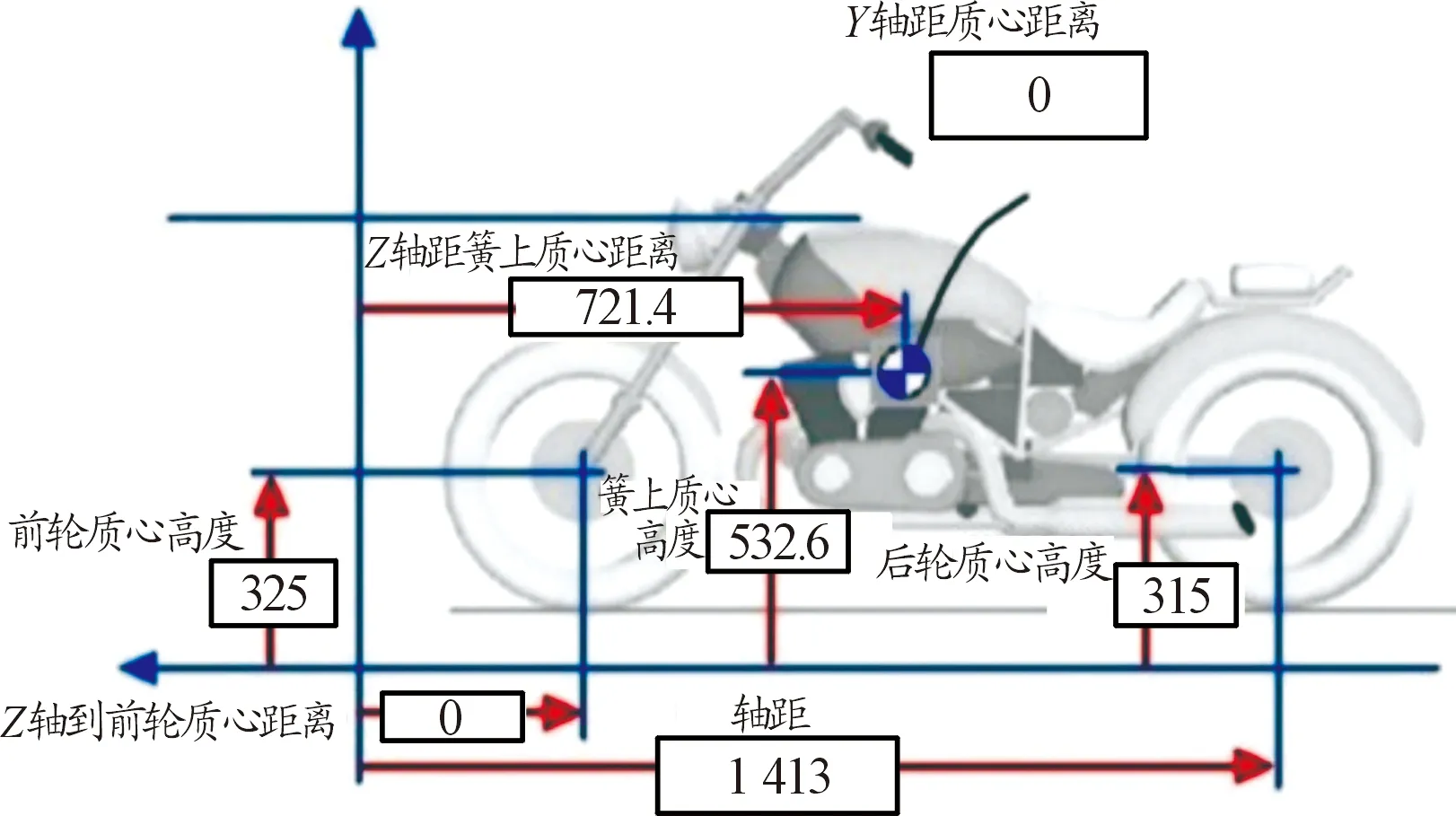
图1 车辆整车参数模型示意图Fig.1 Vehicle parameter modeling
由于驾驶员质量在人-车系统总质量中占比较大,驾驶员质量对摩托车行驶动态性能有较大影响,所以必须对驾驶员进行模型的建立,主要考虑驾驶员的质量,根据GB/T 5378—2008《摩托车和轻便摩托车道路试验方法》驾驶员质量应为(75±5)kg,本次研究驾驶员质量取75 kg。为简化模型,对摩托车在移线工况下行驶时的驾驶员姿态问题不作特殊考虑。因此在转弯时,驾驶员的侧倾角度与车辆侧倾角度保持一致。
路面条件对摩托车行驶动态性能有显著影响,参照 GB/T 6323—2014《汽车操纵稳定性试验方法》,建立道路模型,摩擦因数为0.85。
2.2 仿真分析
旨在分析摩托车在移线工况下的行驶稳定性。根据ISO3888—1∶2018(E)标准设置移线工况:侧向偏移为 3.5 m,过渡段分别为30、25和25 m,在仿真中作为预定轨道输入。根据建立的摩托车整车模型,分别在80、100、120、140和160 km/h 5种速度下进行仿真。仿真得到表征前悬架抖动的转向系质心位置侧倾角速度和转向系横摆角速度时域变化曲线,如图2所示。
由图2可得,车辆在80、100、120和140 km/h行驶时,车辆前悬架规律振动,车辆处于稳定状态;车辆在160 km/h行驶时,第5s开始出现高频振荡,振幅逐渐变大,车辆前悬架出现剧烈抖动,车辆操纵稳定性变差,车辆发生不稳定现象。

图2 优化目标时域响应曲线Fig.2 Time domain response curve of optimization objective
3 前悬架参数灵敏度分析
灵敏度是设计参数变更对设计性能指标影响的定量评估[10],使用灵敏度分析可知道多种设计变量中对响应有较大影响的因素,用以指导参数的匹配优化。利用归一化法求设计变量的灵敏度,设灵敏度分析回归方程,Y=F(X1,X2,…,Xn),Y为目标响应,Xn为设计变量,计算各设计变量的微小变动dXn对目标响应的影响dY,求得各个设计变量的灵敏度SXn[2]。归一化的灵敏度为:
式中:PXn为设计变量灵敏度占灵敏度数值总和的比例,为正则为正相关,为负则为负相关。
以摩托车前悬架系统相关参数作为设计变量,主要有:前叉后倾角(A_STEER)、前伸距(X_FORK)、转向头质量(MSTR)、车架扭转刚度(KTWST)、车架扭转阻尼(BTWST)、前悬架系统刚度(F_AXLE_X_COEFFICIENT)、前悬架系统阻尼(F_AXLE_VX_COEFFICIENT)、转向阻尼(BSTR)和前叉质量(M_FORK)。以转向系质心位置侧倾角速度和转向系横摆角速度为优化目标。
选择空间填充能力和非线性拟合性较好的最优拉丁超立方设计方法对设计变量进行灵敏度分析[11],结果如图2所示。灵敏度分析图显示了各个设计变量对响应目标的影响占比,其中蓝色为正相关,红色为负相关。
由图3所示的灵敏度分析图可知:对转向系质心位置侧倾角速度和转向系横摆角速度两个响应影响较大的设计变量分别是:前悬架系统刚度、前悬架系统阻尼、车架扭转阻尼、前叉后倾角和前伸距。因此,选择上述所列设计变量作为最主要的优化变量。
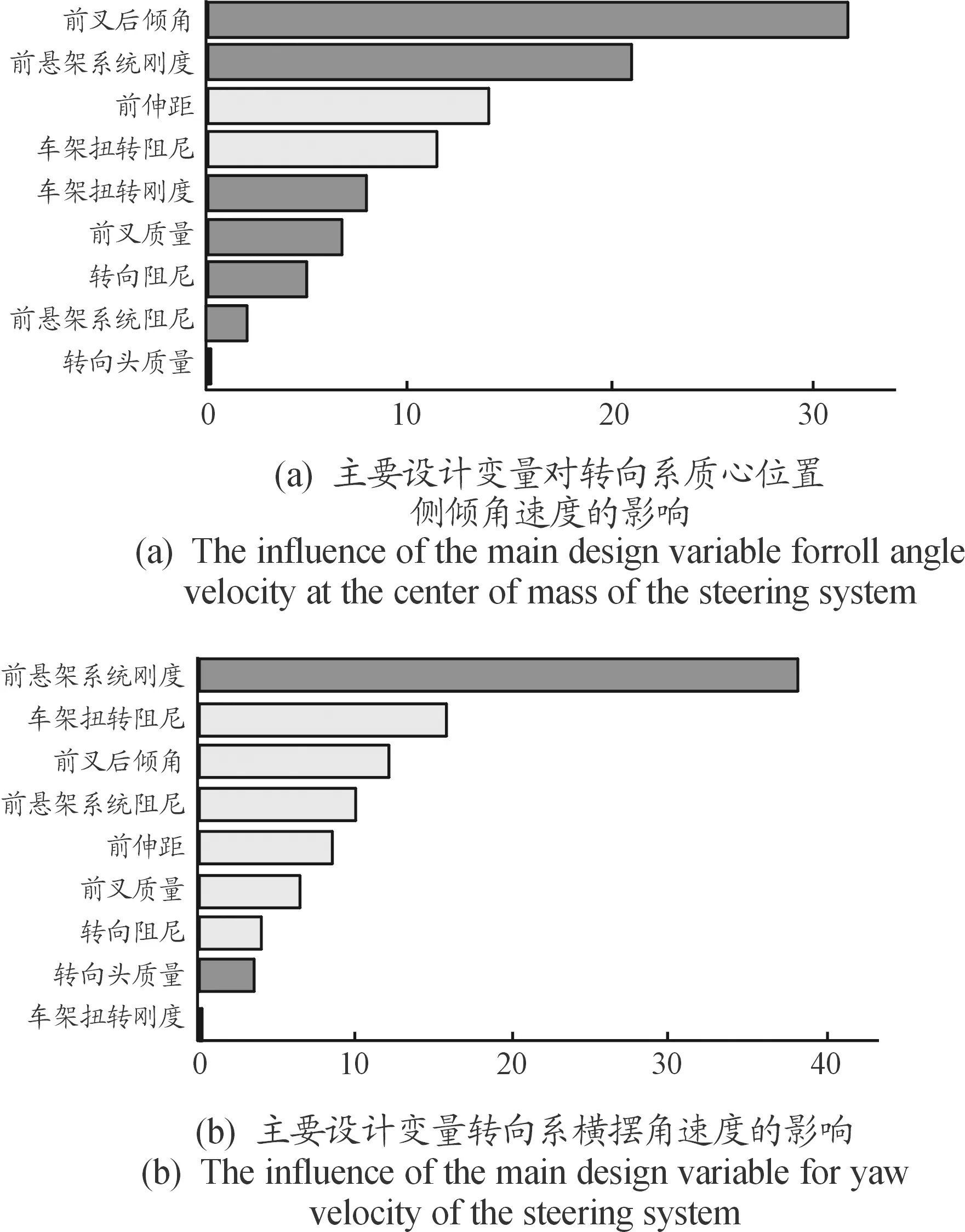
图3 灵敏度分析直方图Fig.3 Sensitivity analysis
4 前悬架系统参数多目标优化
4.1 多目标优化的数学模型
以灵敏度分析结果为指导,将前悬架系统刚度、前悬架系统阻尼、车架扭转阻尼、前叉后倾角和前伸距作为优化变量。根据不同速度下车辆的稳定性表现,以160 km/h稳定车速行驶时作为主要研究对象。通过企业设计经验确定设计变量的取值范围如下:前悬架系统阻尼、车架扭转阻尼、前伸距和前悬架系统刚度取初始值的±20%;由于车型的限制,前叉后倾角的取值为26°±1°。各设计变量取值范围如表2所示。
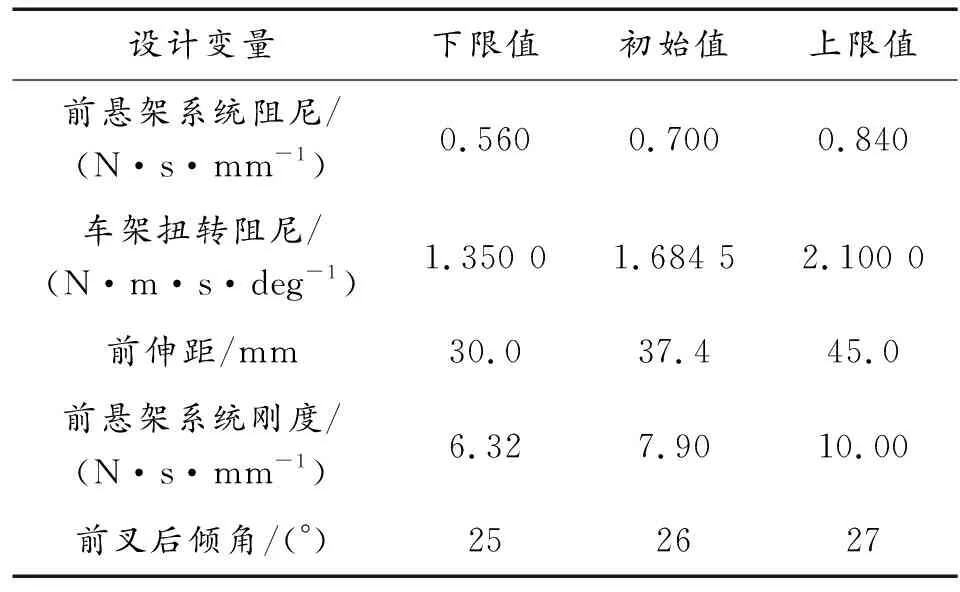
表2 优化变量取值范围
优化目标为转向系质心位置侧倾角速度和转向系横摆角速度峰值最小,此多目标优化问题的数学模型为:
式中:R1、R2、R3、R4、R5分别为前悬架系统刚度、前悬架系统阻尼、前叉后倾角、车架扭转阻尼和前伸距的取值范围。
带精英策略的快速非支配排序遗传算法(NSGA-Ⅱ)是在NSGA算法基础上而提出,NSGA-Ⅱ具有全局搜索性能好、收缩速度快和计算效率高等优点,广泛用于现代工程优化问题[12],所以本次优化问题选择NSGA-Ⅱ算法,设定种群数量为100,遗传代数为20,交叉率为0.9[13]。搭建仿真平台,如图4所示。

图4 ISIGHT联合仿真平台示意图Fig.4 Co-simulation platform of ISIGHT
4.2 优化结果
经过2000步的迭代计算,完成优化分析。如图5为优化目标寻优历程曲线,显示了优化目标值的迭代寻优过程,其中绿色点为最优解。其优化后设计变量取值如表3所示。将优化前、后转向系质心位置侧倾角速度和转向系横摆角速度结果进行对比,如表4所示。由表4可知,转向系质心位置侧倾角速度由92.16 deg/s降为68.61 deg/s,减小了25.6%;转向系横摆角速度由29.49 deg/s降为20.21 deg/s,减小了31.5%,优化效果较好。
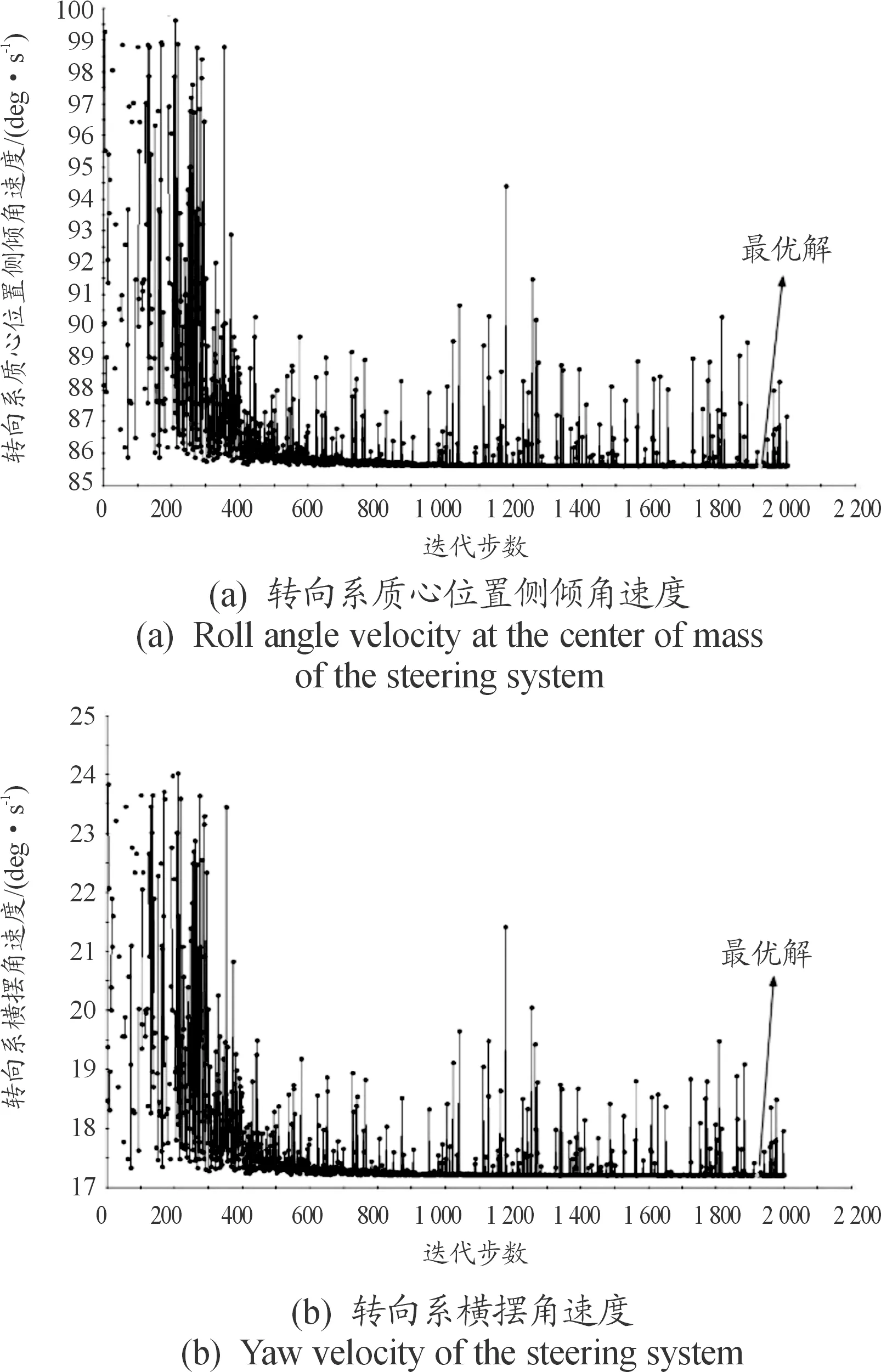
图5 寻优目标历程曲线Fig.5 Optimization process
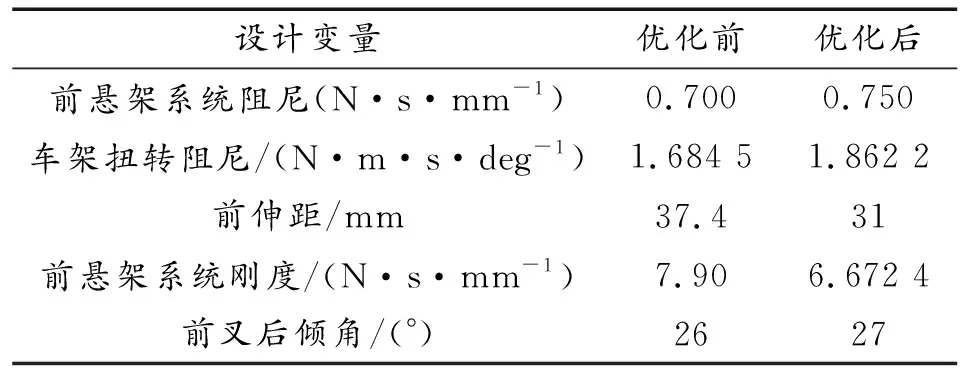
表3 优化后变量取值Table 3 Values of variables after optimization
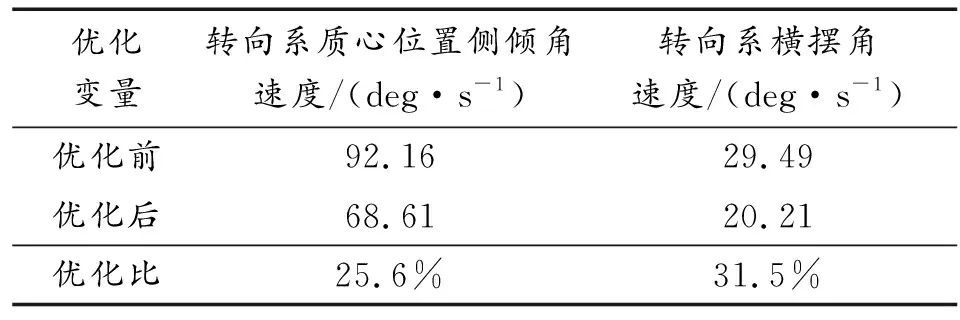
表4 优化前后结果
用优化后的各设计变量建立车辆模型,其他参数及仿真条件保持不变,再次进行仿真。将优化前后的仿真结果进行对比,如图6所示。其中黑色曲线代表优化前,红色代表优化后。从图6中可以看出,在对设计变量进行优化后,转向系质心位置侧倾角速度和转向系横摆角速度均有明显减小,车辆行驶稳定性有所提高。
5 结论
1) 使用BIKESIM建立摩托车动力学模型,并考虑摩托车驾驶员与摩托车在移线运动状态下的侧倾角关系,在移线工况下进行动力学仿真,摩托车行驶抖动的问题,仿真结果与实际情况相符;
2) 以转向系质心位置侧倾角速度和转向系横摆角速度作为优化目标,对摩托车前悬架相关设计参数进行灵敏度分析,根据分析结果选择影响较大参数,即前悬架系统刚度、前悬架系统阻尼、车架扭转阻尼、前叉后倾角和前伸距作为优化变量;以分析结果为指导完成多目标优化,使得转向系质心位置侧倾角速度和转向系横摆角速度分别减小25.6%和31.5%。
3) 对比优化前后转向系质心位置侧倾角速度与转向系横摆角速度,对比结果表明2个响应均有减小,表示优化后摩托车动态行驶性能提高,体现优化方案的正确性。