调谐质量阻尼器基于自适应权重粒子群算法的优化设计
2021-10-14柯永贤
张 雪,潘 超,韩 笑,柯永贤
(1. 烟台大学土木工程学院,山东 烟台264005;2.同济大学结构防灾减灾工程系,上海 200092)
大量研究表明,减震装置[1]可以有效降低风和地震作用引起的结构动力响应[2-3]。其中,调谐质量阻尼器(Tuned Mass Damper, TMD)作为一种吸振减震装置,因其结构简单、使用方便而受到较多的关注。TMD系统[4]主要是由质量块、弹簧和阻尼3个基本元件构成,其作用机理是通过调整TMD系统的频率使之与主结构基本周期相近,使主结构的振动能量向TMD转移并由其耗散,从而降低主结构的响应。
不少学者针对TMD系统参数的设计方法开展了研究工作。DEN提出了TMD基于定点理论的设计方法,但由于所需质量比较大,减震装置的质量足够大时才能达到理想的减震效果[5]。随着TMD减震系统不断应用于结构风振控制,欧进萍等[6]根据风荷载规范提出了设置TMD减震系统控制结构风振的实用方法;李春祥团队[7]研究了TMD-高层钢结构系统风振舒适度的设计方法;李创第等[8]基于复模态理论推导了TMD减震结构的风振、抗风可靠度约束抗风优化设计公式。上述传统设计方法主要是控制主结构加速度响应,未考虑附加减震装置的响应问题。基于此,汪正兴等[9]提出了控制主结构风振响应为主、兼顾TMD子系统相对位移响应的参数优化设计方法;李创第等[10]在结构随机振动响应的基础上,提出了TMD基于动力可靠性约束的优化设计方法。上述方法保证了结构在外激励下的整体性,TMD子结构对主结构不一定有最大耗能效果。SADEK等[11]在TMD减震结构前两阶模态阻尼比相等且最大的情况下,提出了确定TMD系统阻尼比和最优频率比的方法;卜国雄等[12]以主结构吸收的能量最少为优化目标,通过非线性规划方法得到TMD系统的最优频率比和最优阻尼比;李祥秀等[13]从功率法角度出发,以主结构耗能功率最小为优化目标获得了TMD系统的最优频率比与阻尼比。然而,基于定点理论的设计方法只对主结构为无阻尼的结构体系有效;而且已有设计方法未明确给出质量比的设计公式,设计过程中未考虑性能目标和控制成本等问题。
鉴于此,本文提出了TMD基于自适应权重粒子群算法的参数优化设计方法。根据随机振动理论,推导了TMD有阻尼单自由度结构在白噪声激励下的解析解,将TMD减震结构的性能目标导向设计[14-15]问题等价为约束优化问题,编制计算机程序在满足结构性能目标的前提下实现成本最小化,得到TMD的设计参数结果,目标性能指标选为随机响应减震比,减震装置的制作成本会随着建筑物重量的增加而增大,故将TMD的质量比选定为成本控制指标,最后通过设计实例验证了此方法的合理性和有效性。
1 理论基础
1.1 TMD的运动方程
承受地面运动激励的单自由度结构,设置TMD后(图1),其动力平衡方程为
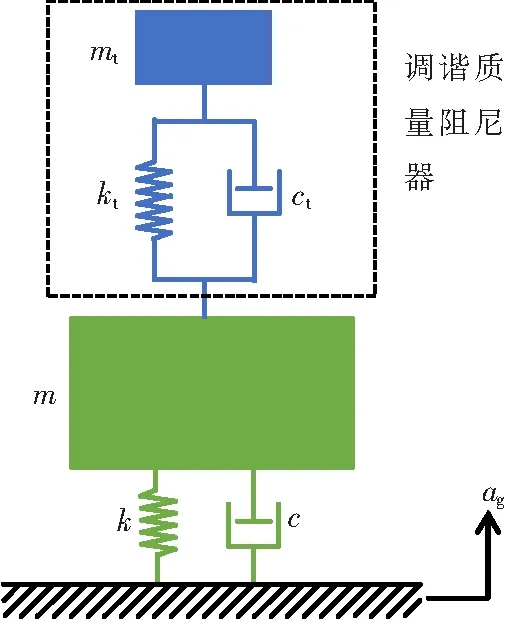
图1 TMD单自由度减震结构力学模型

(1)
式(1)中,m、k、c分别为主结构的质量、刚度和阻尼系数,mt、kt、ct分别为TMD系统的质量、刚度和阻尼系数,u表示为主结构相对于地面的位移,ut表示为TMD相对于地面的位移,ag为地面运动加速度。
对于单自由度TMD结构而言,其在白噪声激励下的均方响应可以表达为关于质量比μ、刚度比κ、阻尼比ξ和结构固有阻尼比ζ的解析表达式。定义如式(2)所示的无量纲参数:
(2)
则式(1)的无量纲形式可表示为
1.2 设置TMD有阻尼单自由度结构的随机振动响应
通过拉普拉斯变换,式(3)可以转化为方程:

(4)
其中,Ag,U,Ut为ag,u,ut的拉普拉斯变换形式。
线性方程组关于U,Ut的解如下:

(5)

(6)
则结构位移响应的传递函数为

(7)
令s=iω,位移响应传递函数的幅值为

(8)
假设地面运动激励为白噪声过程,其功率谱密度为S0,则结构均方响应可表示为

(9)
将式(7)代入式(9),可得设置TMD单自由度结构的位移均方响应解析表达式为[15]

(10)
式(10)中,
A=4ξ2+4μ3ξ(ξ+ζ)+4μξ(3ξ+ζ)+μ2(1+12ξ2+8ξζ) ,
(11)
B=4ξ2ζ+μ4(ξ+ζ)+4μ3ξζ(ξ+ζ)+
2μξ(-1+6ξζ+2ζ2)+μ2ξ(-3+12ξζ+8ζ2),
(12)
C=ξ2+(1+κ2)ξζ+κ2ζ2,
(13)
D=κ2+2ξ(ξ+ζ)+κ(-1+2ξζ+2ζ2) 。
(14)
2 TMD的性能导向设计
单自由度TMD结构设计的核心任务是确定3个关键参数:质量比μ、刚度比κ、阻尼比ξ。本文采取性能需求为导向的设计思想,即在满足性能需求的前提下,寻找一组设计参数使减震控制的成本最小。性能需求指标选为随机响应减震比,成本控制指标为TMD的质量比。设计过程中结构响应通过随机振动分析求得。
将设置TMD结构的减震比定义如下:
(15)
设计过程中需确立一个期望达到的减震比作为设计目标,目标减震比可通过对原结构进行初步分析并结合性能需求和安全裕度确定[16]:

(16)
对于设置TMD的单自由度结构,基于随机振动均方响应的减震比可表示为式(17):

(17)
将式(10)代入式(17),可得设置TMD系统的单自由度结构在白噪声激励下随机响应减震比的解析表达式
γ=

(18)
上述单自由度TMD结构设计问题的数学表达式可以表示为如下形式:
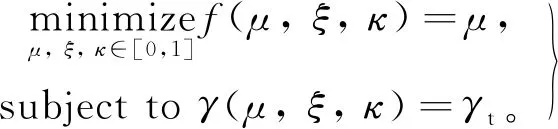
(19)
式(19)中,f(μ,ξ,κ)为优化目标函数,γt为目标减震比。
可用惩罚函数法将约束优化问题转化为无约束问题形式为

(20)
其中,h为惩罚权重。
由于减震比解析表达式较繁琐,式(19)或(20)所述优化问题难以用解析的方式得到显式的表达式。而采用经典数值优化方法一般需要目标函数对优化变量的偏导数表达式,且需要对初始解有较好的估计, 求解过程繁琐,效果不够理想。故本文选择概念简单、便于实现、鲁棒性好的粒子群算法进行设置TMD的单自由度结构的参数优化设计。
3 自适应权重粒子群优化算法
粒子群算法源于对鸟群捕食行为的研究,是一种基于迭代的优化工具,适用于求解大量非线性的复杂优化问题。因粒子群算法需要调整的参数较少,且易于程序编程,已经被广泛应用于多个科学和工程领域。与传统算法不同,粒子群算法不用对函数求导,可直接将目标函数值作为搜索信息[17],进而解决许多较复杂目标函数的优化问题。
粒子群算法[18]首先初始化一群随机粒子(随机解),然后粒子们追随当前的最优粒子在解空间中搜索,即通过迭代找到最优解。假设d维搜索空间中的第i个粒子的位置和速度分别为Xi,Vi,在每次迭代过程中,粒子通过跟踪两个最优解来更新自己,即个体极值pbest和全局最优解gbest。在找到这两个最优值时,粒子根据如下的公式来更新自己的速度和位置:
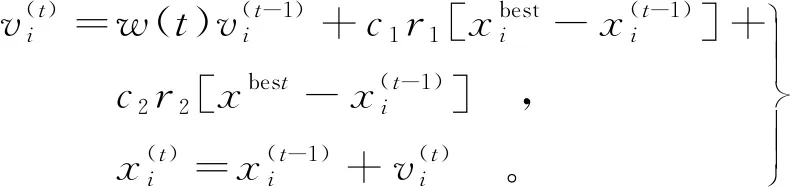
(21)
式(21)中,c1和c2为正的学习因子,r1和r2为0到1之间均匀分布的随机数,w(t)为惯性权重。
粒子群算法在随机搜索中存在易陷入局部最优的问题。惯性权重越大,越有利于提高算法的全局搜索能力,反之,则会增强算法的局部搜索能力。因此,可通过改变惯性权重来动态地平衡全局和局部搜索能力,进而加速算法的收敛速度。
本文所采用自适应惯性权重系数的表达式为
w(t)=(wmax-wmin)Ps(t)+wmin,
(22)
式(22)中,Ps(t)为成功例子比例,即每次迭代后搜索到更优解的粒子数量占粒子总数量的比值,其表达式为
(23)
式(23)中,Si(t)为粒子成功函数,表达式为

(24)
进化算法作为模拟自然进化过程的优化方法,其本质是一种无约束搜索技术,故将粒子群算法用于求解本文的约束优化问题时,使用惩罚函数法[19]进行约束优化。惩罚权重的引入可以将约束优化问题转化为无约束优化问题,对适应度函数添加惩罚项可以剔除不满足约束条件的个体。如果惩罚权重选取过大,会远离目标函数的最优点,需要增加迭代次数长时间搜索,若惩罚权重选取过小,则会导致算法稳定性、可靠性变差。鉴于此,本文算法使用自适应约束惩罚权重进行算法约束,其表达式为
(25)
式(25)中,t为飞行时间步。
4 设计算例
本节将运用上文提出的基于自适应权重粒子群算法的优化设计方法对某单自由度TMD结构进行优化设计。与基于定点理论的参数设计方法比较可知,本文提出的方法考虑了主结构的固有阻尼比。本文设定单自由度结构的关键参数:质量m0=200 t,刚度k0=19 980 kN/m,固有阻尼比ζ=0.05。由此得到结构的自振频率及自振周期分别为
考虑固有阻尼比ζ和目标减震比γt不同的4个设计工况,基于Python语言编写自适应粒子群算法的程序PSO,对表 1所列工况进行参数优化求解。
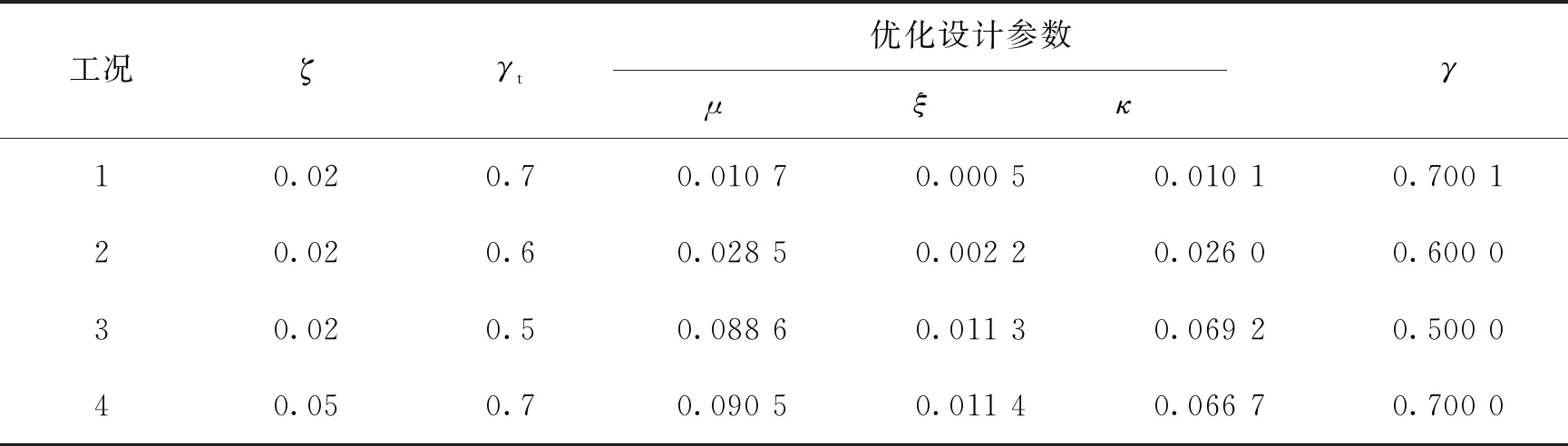
表1 基于自适应权重粒子群算法的TMD参数优化设计结果
观察表1数据可知,基于自适应权重粒子群算法设计得到的TMD减震结构的实际减震比基本与目标减震比保持一致;在目标减震比相同的前提下,质量比随结构固有阻尼比的增加而增加。
为了验证自适应权重粒子群算法的性能,各参数设置如下:粒子数量设置为100,最大迭代次数设置为100,自适应惯性权重中wmax=1.0,wmin=0.3。各进行100次寻优运算并对比平均迭代次数,选取首次收敛到目标值时的次数作为迭代次数的判定标准。分别作如下对比:首先将自适应惯性权重粒子群算法(APSO)与固定惯性权重、自适应惩罚权重粒子群算法(FPSO,惯性权重设为1.0)进行迭代次数对比;其次,对比使用自适应惯性权重、固定惩罚权重粒子群算法(GPSO,惩罚权重设为50)的迭代次数。对比结果如表2。最后,为了验证结果的正确性,将自适应权重粒子群算法与随机给定初始解的“二次规划法”对比成功率,成功率为多次运算后收敛到正确解的次数与总实验次数的比值,算法运行30次,对比结果见表3。
观察表2、表3数据可知,本文提出的自适应惯性权重和自适应惩罚权重算法所需迭代次数更少一些,收敛速度更快一些,与二次规划法对比发现自适应权重粒子群算法成功率可高达90%~100%,自适应权重粒子群算法避免了算法陷入局部最优运算,可动态平衡全局和局部搜索能力进而加速收敛速度,而且成功率更高。
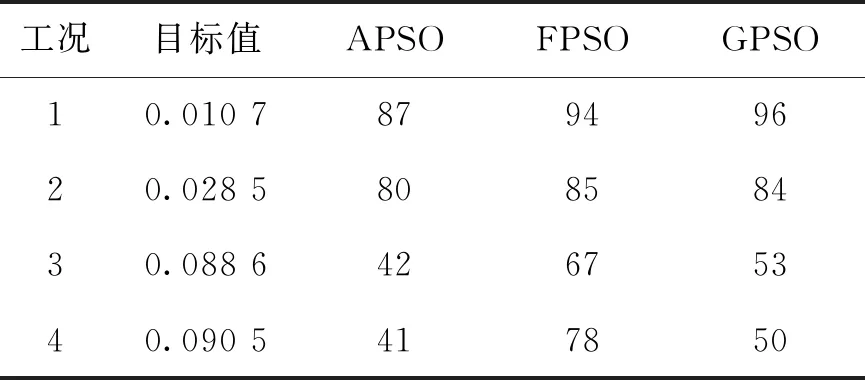
表2 不同策略粒子群算法迭代次数对比
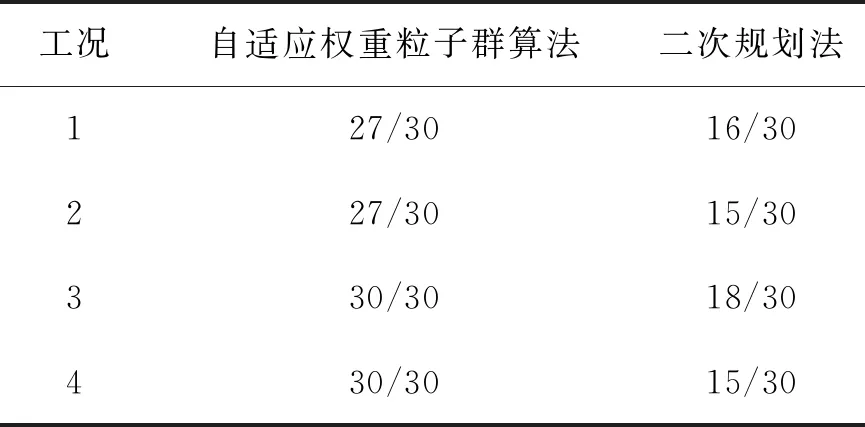
表3 自适应权重粒子群算法优化求解成功率对比
根据定点理论,可得到不同工况下TMD系统的设计参数数值,结果如表4。与表1中数据对比可知,在目标随机响应减震比一致的情况下,基于自适应权重粒子群算法得到的TMD质量比μ的数值更小一些,即制作阻尼器的成本较低一些,这说明本文提出的方法可以在保证结构性能需求的前提下将减震控制的成本控制在较低水平。
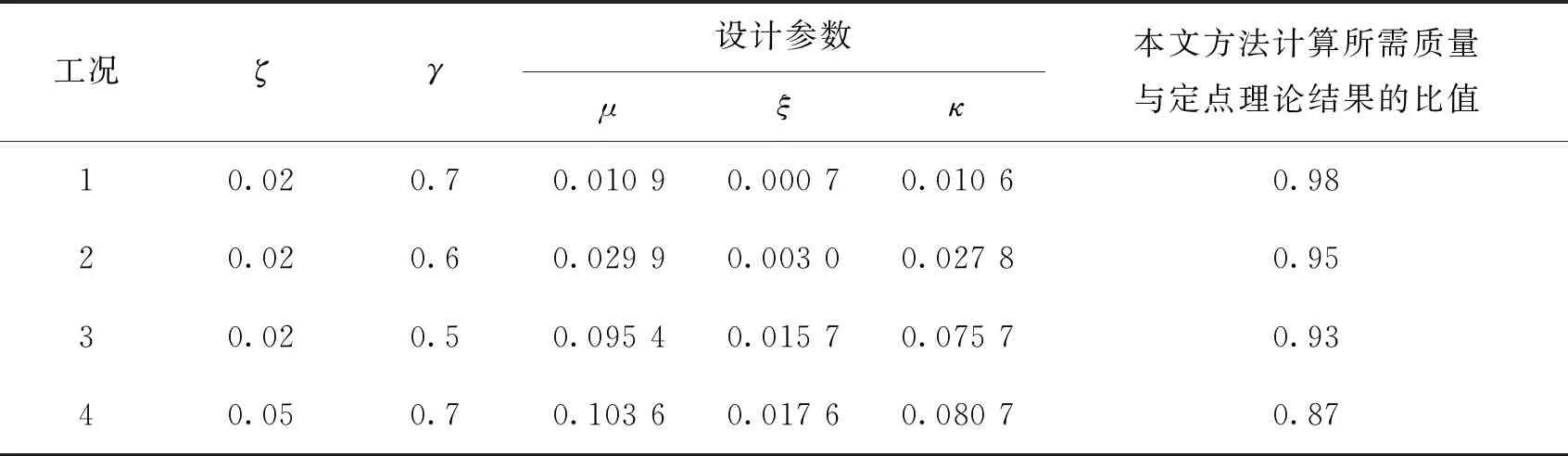
表4 基于定点理论的参数设计结果
表1、表4中参数分别代入位移响应频响函数解析表达式中,可得到基于2种不同方法的频响曲线如图2。从传递函数曲线可看出,在目标随机响应比一致时,随着等效阻尼比增大,结构的共振峰值随之降低;而且等效阻尼比相同时,共振峰值则随着随机响应减震比的增加而增加。
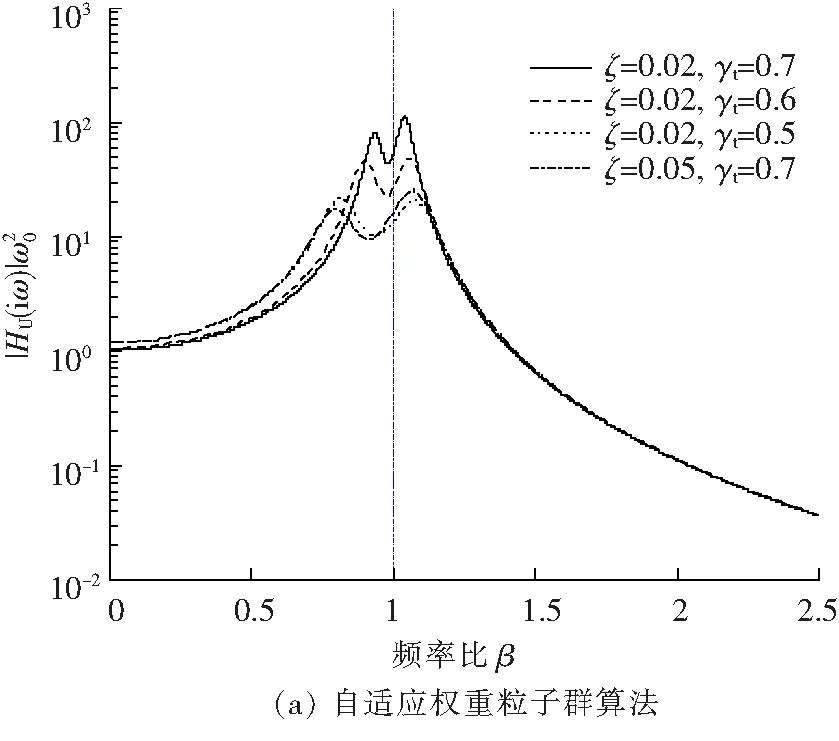
图2 单自由度TMD结构的频响曲线
为了验证自适应权重粒子群算法所求得参数的减震效果, 以工况3为例, 分别对原结构、减震结构进行时程分析,输入不同频谱特性的地震动:白噪声、人造地震动[20-21]、天然地震动(选自美国太平洋地震工程研究中心的强震观测数据库https://peer.berkeley.edu/),得到各自对应的位移响应曲线(图 3)。由图 3可知,时程响应结果计算得到的均方响应减震比均接近目标减震比0.5,这说明本文方法设计的TMD系统可以有效控制结构的位移响应,即在满足结构性能目标需求的前提下得到的调谐质量阻尼器参数是正确的。

图3 不同地震激励下的原结构与TMD减震结构的时程曲线(γt=5)
5 小 结
本文将自适应权重粒子群算法用于TMD减震结构的性能导向优化设计,并通过设计算例验证了设计原则与算法的可行性与有效性。
(1) 自适应权重粒子群算法能有效求解TMD减震结构的优化设计问题,易于编程实现且鲁棒性好。
(2) 性能目标导向设计原则可以同时兼顾TMD减震结构的减震性能与控制成本。
(3) 在目标减震比相同的前提下,与经典的定点理论相比,按本文方法计算所需的TMD的调谐质量更小。
