基于机器视觉的智能交通管理系统*
2021-10-12林菡陈丽娟吴帆旭
[林菡 陈丽娟 吴帆旭]
1 引言
随着近年来人工智能技术和图像识别技术的迅速发展,智能交通系统的建设已被许多国家提上议事日程。特别是在中国,截至2019 年底,中国公路总里程已达484.65 万公里、高速公路达14.26 万公里。随着公路里程的增加,中国的机动车数量激增。同时,交通状况是城市正常运营的重要指标之一。建立智能交通管理系统已成为必然之举。其中,机器视觉是提高交通管理系统智能水平的重要推动力。采用基于机器视觉的智能交通管理系统,可以大大降低传统交通管理系统的人力和物力成本,同时提高交通标准化水平,大大减少人工干预次数,降低市政压力。一定程度上减轻了交通压力。
2 背景
2.1 智能交通管理系统简介
智能交通系统[1](Intelligent Transport System,智能交通系统)是将先进的智能识别技术、通信技术、结合高效率的智能传感器技术、控制技术及计算机相关技术等,并将其有效地整合了现代交通监控管理系统。进而构建起的一种在巨大区域内及全方位发挥作用的,实时、准确及高效的综合现代交通智能管理系统。美国、日本、西欧率先展开相关的研究并成为ITS发展的前三甲,此外加、中、韩、新、澳等国家的研究也具有相当规模。近几年来不仅仅是发达国家,各个发展中国家也陆续开展了相关的研究工作。
智能交通管理系统,可以有效的提高交通网络的安全性,效率与可持续性;减少交通拥挤,改善驾驶员体验。
2.2 OpenCV
OpenCV 的全称是开源计算机视觉库,是一个由许多技术公司参与开发的跨平台的机器视觉库。是一种开源的可以在各大商业和研究领域中免费使用。OpenCV 可用于开发实时图像处理、机器视觉以及模式识别程序。该库也可以使用Intel 的互联网打印协议进行加速。同时它具有一系列的图像识别和机器视觉算法,可以在机器视觉[2]处理上发挥重要作用。
3 系统分析
3.1 系统功能
(1)车辆识别功能:在系统布置区域对所有经过监测点的车辆进行捕捉识别。对违章变线等违反交通规则的行为,智能系统要能过进行自动识别,同时将违章现场的行为图片进行上传保存,留取证据,并且定期清理系统空间内的过期无效图片,从而节省内存空间。
(2)车辆特征捕获功能:在集成相机的检测范围内,若有车辆经过,集成相机需要有能够正确判断出车辆的具体特征,并在一系列光学设备的的协助下进行捕获,拍摄的图片中能够体现出运动车辆的整体特征,以及标注出该车辆的行驶信息及车辆信息如:车牌号,车型,整车颜色等。
(3)车速测定功能:在相关监测点中布置的摄像机要对来往车辆进行识别的同时,还要完成对车辆在行驶过程中的视频测速,并将具体速度,车牌信息等表示在清晰的车辆照片中,对于速度测定的精度要求:测定速度与真实速度的误差要小。
(4)车牌识别功能:通过部署在监测点的相机或摄像头,通过opencv 中的具体算法程序,自动通过视频识别出经过监测点的车牌,同时将识别出的车牌信息上传数据库,以备查询。
3.2 系统架构
基于机器视觉的现代智能交通管理系统所需要实现的目标是:监控系统收集道路交通信息,同时向数据库传回具体的车辆信息并使用有关算法进行处理与分析,同时系统根据用户设定的具体规则进行比较查询,如有发现非法行为的出现:如超速,追尾等,系统根据程序进行报警提示用户,同时抓取图像,留存证据,但是对于无违法行为正常行驶的车辆所拍摄的照片仅进行保存,过期后删除,同是系统数据库进行数据的统计查询,如图1 所示。
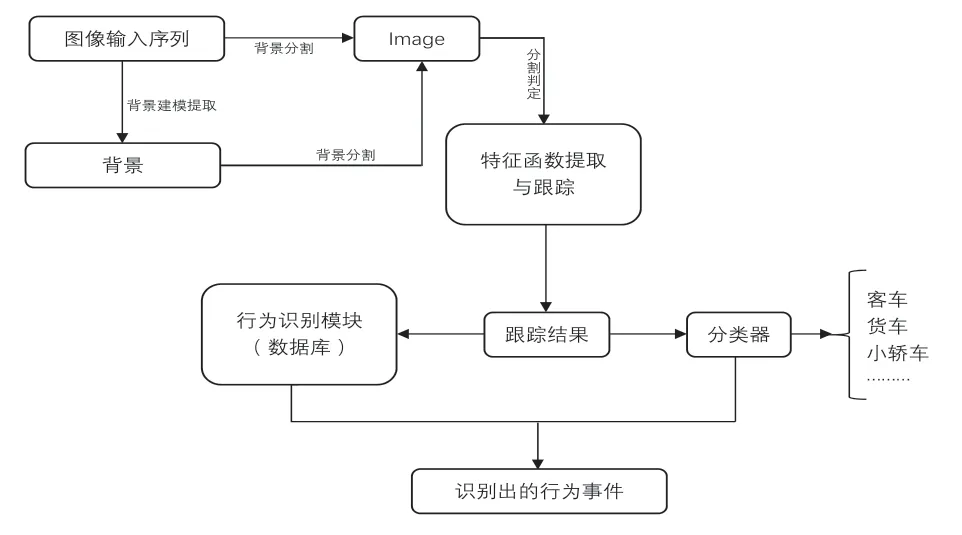
图1 系统架构图
据需求分析,系统可分为前端数据收集分析系统、系统后台数据库数据管理系统。二者互相协助,密不可分。
3.3 系统实现
要实现系统的上述相关功能,就必须实现对运动的来往车辆的检测、车辆的背景的提取以及轨迹跟踪;接下来进行系统实现的方法介绍。
3.3.1 运动目标的检测
与静态目标的检测[3],[4]相比,在检测运动目标时要做的第一件事是将运动的物体进行图像分割,找到对识别有意义的部分,然后从分割图像中提取所需的特征。由于是对运动的车辆进行识别,所以必须在视频图像中进行测定,首先将图像分割为运动区域与恒定区域,进而进行特征的提取,从而判定该物体(本项目为车辆)的具体情况。下面具体介绍两种运动物体的分割方法:光流法和差分法。
(1)光流法
光流法在机器视觉以及其他图像处理相关领域中的运用也十分广泛,其可用于运动物体的检测、图像的分割计算、运动补偿编码,或通过物体的表面和边缘的立体测量。它利用时域中图像序列中像素强度的变化来具体确定每个像素位置的相对运动。但是,由于实现过程的复杂性和较长的计算时间,无法实现实时监控。故本系统不采用光流法开发系统,而采用差分法进行相关功能的开发。
(2)差分法
①帧间差分
帧间差分法是从相机捕获的视频中提取相邻两帧或相隔若干帧的两幅图像像素值做减运算,并对减运算后产生的图像执行阈值化处理,以提取图像中的运动区域,假如做减运算的两帧图像的帧数分别为第n 帧,第(n+1)帧,且这两帧图像分别为fn(x,y);fn+1(x,y),差分图像二值化阈值为T,差分图像用D(x,y)表示,则帧间差分法的公式如下:

故帧间差分法是所有运动分割中的相关算法中最简单的一种方法。但是对于运动物体表面若具有大块灰度值类似区域之情况下,使用这种方法所做出的差分图像会出现一些孔洞。并且识别误差会伴随着物体运动速度的增大而增大。故对于与本系统而言此方法并不适用与对高速运动的物体的检测。
② 背景差分
背景差异方法是通过将图像序列中的当前帧与预先建立的背景参考模型进行比较来测量移动对象的方法。此方法对动态场景的变化非常敏感。它执行图像帧和此时捕获的视频的背景图像之间的差分操作,从而获得目标车辆的运动区域的灰度图像,并对灰度图像进行阈值处理。提取运动区域,而且为避免环境光照变化而对检测产生影响,背景图像根据摄像机当时捕获的图像帧进行更新。该方法在一定程度上克服了环境光线的变化对图像识别过程中所造成的影响。
根据相关处理方法的不同,存在几种不同的背景差分方法。若设It,Bt分别为当前帧与背景帧图像,T 为前景灰度阈值,则其中一种方法如下:
通过调用摄像机,拍摄图像,去前几帧图像的均值,并将其作为初始的背景Bt
提取当前帧与背景进行图像二值并进行减运算,并减去绝对值;公式为:
对上述处理过的图片进行形态学的处理以及更新背景图像。
3.3.2 程序功能实现
通过建立背景图像模型来对运动车辆检测,并做到对运动车辆的跟踪。通过运用OpenCV 开源技术中所拥有的机器视觉相关函数,实现对摄像机现场采集到的运动图像数据进行操作分析,以及对摄像机的规则设定与定标。进行包括对采集的图象的分配、释放与图象相关数据的转换分析。对于功能实现,基本上使用OpenCV 图像处理相关函数,并且根据对运动车辆的跟踪,使用累积函数的相关函数统计出相关数据。
本项目通过运用上述函数实现对监测摄像机实时拍摄的视频流中的运动车辆的轮廓提取与检测,但是在实际操作中,需要进行背景图像模型的建立。车辆轮廓提取程序流程图如图2 所示。
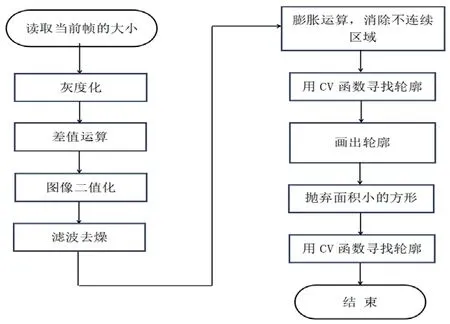
图2 车辆轮廓提取程序流程图
主程序功能流程如图3 所示。
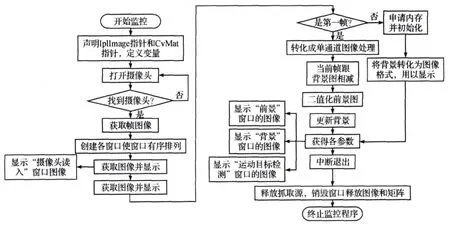
图3 主程序功能流程
4 实验结论
通过基于机器视觉的智能交通管理系统,对视频中运动车辆的轮廓提取和运动目标跟踪过程中,在现场限定环境下,受到相机的采样效率、相机本身性能以及烧录的算法程序的复杂程度,呈现正比例关系;监测效果基本满足系统的实时性要求,动态跟踪的正确率达到93%以上。
5 结语
在中国城市化进程大踏步提速的今天,本项目通过结合智能交通管理系统的课题,进行了视频流中的动态车辆的图像信息采集,车辆运动状态的监测,完成识别功能,可用于智能交通管理系统中;后续,我们将会对相关算法进行优化,在非限定环境下,对车辆的识别,做到满足大多情况下的使用需求。基于机器视觉的智能交通管理系统可以降低传统交通管理系统的人力和物力成本,同时提高交通标准化水平,可以大大提高城市自动化和智能水平。
