城市道路智能汽车斑马线避撞行人策略研究*
2021-10-11方锐王涛彭涛郑睿卿
方锐 王涛 彭涛,3 郑睿卿
(1.中国汽车技术研究中心有限公司;2.天津职业技术师范大学汽车与交通学院;3.天津大学电气自动化与信息工程学院;4.兰州交通大学机电工程学院)

近年来,汽车与交通行业的快速发展给人们的交通出行带来极大便利,然而,伴随汽车保有量的不断增加,交通道路安全也面临着更加严峻的挑战[1-2]。其中,城市道路中车辆与过街行人的避撞事故频频发生,对车辆与行人造成严重伤害,一直是研究的热点问题[3-4]。智能汽车能够帮助驾驶员有效避免或减轻碰撞事故,在避免交通事故中具有巨大应用潜力。日本丰田汽车公司研发的“汽车预碰撞系统”,可以通过分析计算得出汽车碰撞的潜在概率,使得汽车能在发生碰撞前降低车速、收缩安全带,最大可能保证汽车与行人的安全。德国大众汽车开发的Front Assist 安全系统,通过传感器检测前方障碍物、车辆与行人目标,依据危险评估算法完成碰撞预警及紧急制动[5]。智能汽车避撞行人系统技术主要包括:碰撞风险评估、行人运动轨迹预测以及避撞策略和控制执行等,包括环境感知和决策控制2个重要研究领域[6-7]。随着智能汽车感知水平的不断提高,避撞策略的有效性与合理性越来越多受到研究者的关注[8]。本文首先基于高逼真驾驶模拟器对驾驶员纵向避撞过街行人的驾驶行为特性进行分析,提出了智能汽车碰撞预警方法。然后,建立智能汽车避撞行人的时间和空间约束条件,提出了智能汽车安全避撞行人策略。最后,通过PreScan/Simulink 联合仿真平台,验证了所提避撞策略的有效性。
1 斑马线行人横穿驾驶行为分析
1.1 模拟驾驶实验场景搭建
基于VTD(Virtual Test Drive)仿真软件搭建实验场景,首先在Road Designer(ROD)中建立一条长度为1 000 m、道路宽度为3.5 m 的双向2 车道城市道路(路面附着系数为0.8)。然后,分析实际道路情况,在Scenario Editor(SE)创建行人斑马线横穿过街场景,为有效反映驾驶员在城市道路行车期间突然遇到横穿行人的应急反应,在斑马线前方道路合适位置设置静止停放车辆,停放车辆对驾驶员视线存在遮挡,无法及时发现斑马线横穿行人。设定行人的初始位置,再设定其运动轨迹,初始位置设置在斑马线一侧的固定点处,行人轨迹则沿斑马线直线向前。行人横穿速度设置为1 m/s,实验车与行人初始距离为50 m,实验车初始车速设置为30 km/h、40 km/h 和50 km/h。搭建好的实验场景如图1 所示。

图1 实验场景
1.2 驾驶行为分析
招募10 名驾驶员进行模拟驾驶实验,实验对象主要面向年轻驾驶员,每名驾驶员均有3 年以上驾龄,且实验开始前有充足时间熟悉驾驶模拟器。对实验数据进行记录,并对斑马线行人过街实验场景下驾驶员反应时间、制动平均减速度等驾驶行为特性进行分析,结果如表1 所示。

表1 驾驶行为指标统计分析
驾驶员反应时间数据分布如图2 所示,可以看出,驾驶员在该场景下的反应时间随车速提高有减小趋势,以中位数来反应不同车速下驾驶员的反应时间,30 km/h、40 km/h 和50 km/h 下分别为1.21 s、0.78 s、0.5 s。制动平均减速度数据分布如图3 所示,可以看出,驾驶员在该场景下的平均减速度随车速提高有增大趋势,以中位数来反应不同车速下驾驶员的平均减速度,30 km/h、40 km/h 和50 km/h下分别为2.49 m/s2,4.59 m/s2和7.36 m/s2。

图2 驾驶员反应时间
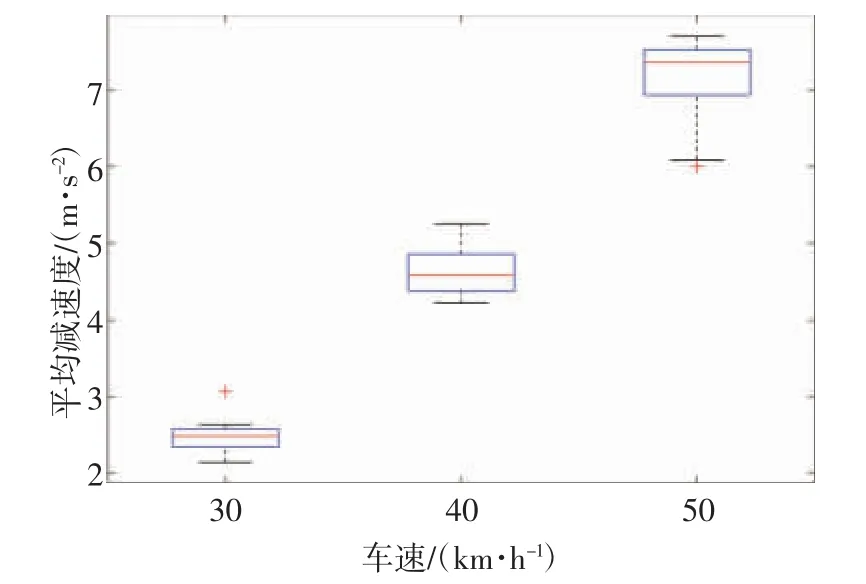
图3 制动平均减速度
2 智能汽车斑马线避撞行人策略
2.1 研究场景分析
针对城市道路斑马线行人横穿过街场景,分析如下:
1)对于城市道路中正常行驶的智能汽车,直行时车辆具有通行权,但在无红绿灯路口处遇到斑马线行人横穿过街;
2)车辆与横穿行人距离过小或由于驾驶员视线存在遮挡、注意力不集中和疲劳驾驶等原因,反应不及时,容易引发车辆与行人碰撞事故;
3)城市道路法规规定:城市道路行驶的车辆一般限速40 km/h,同一方向只有一条车道情况下最大行驶速度为50 km/h;
4)本文为简化分析,假设行人以恒定速度通过斑马线,且沿斑马线直线运动。
2.2 避撞行人策略
2.2.1 行人避撞安全性分析
斑马线行人横穿危险场景如图4 所示,对潜在碰撞区域按照危险程度进行划分,可以分为以下2 种情况:
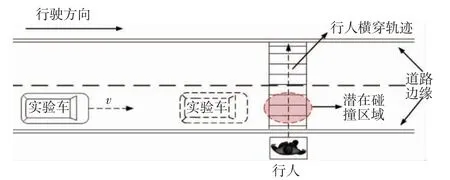
图4 斑马线行人横穿安全性分析
1)智能汽车无需减速制动,行人便可安全通过。

式中:T—当前车速下的碰撞时间,s;
L—汽车与行人间的纵向距离,m;
Vc—当前汽车行驶车速,m/s。

式中:T'—斑马线行人横穿道路所用时间,s;
L0—道路宽度,m;
Vp—行人速度,m/s。
当T>T'时,智能汽车无需进行减速,行人便可安全通行,否则需进行减速制动,避免与横穿行人的碰撞。
2)智能汽车需进行减速制动,行人才可安全通过。

式中:ax为汽车纵向制动减速度,m/s2,其减速度大小可由避撞策略得到。
2.2.2 行人避撞策略
智能汽车避撞方式主要有纵向制动和主动转向2 种,文献[9]首先建立行人和车辆运动模型,然后对行人和车辆运动状态进行估计,通过控制期望制动减速度实现纵向车速的控制,实现与行人的安全避撞,文献[10]对车辆直行与行人冲突典型场景进行分析,基于5 次多项式进行转向避撞路径规划,通过紧急转向方式实现与行人的安全避撞,但未考虑在真实场景下制动与转向避撞方式的切换策略。纵向制动方式具有简单可靠、不对其他车道车辆正常行驶造成干扰的优点[11],考虑到工况的复杂性及行人运动的不确定性,本文通过纵向制动的方式避免与过街行人的碰撞。碰撞风险评估模型是智能汽车避撞策略的关键,主要有基于碰撞时间(TTC,time-to-collision)和基于安全距离2 种,基于碰撞时间的风险评估模型能够更好地反应驾驶员对实际碰撞风险的感受,且已在智能汽车避撞控制中得到广泛应用,其有效性得到了充分验证,因此,本文采用TTC 模型进行碰撞风险评估,TTC 计算方法为:TTC=-Δd/Δv,即两车相对距离除以两车相对速度。
TTC 模型主要围绕报警阈值和制动阈值设定2 个方面进行研究,报警阈值的选取要充分考虑安全性及驾驶员接受度,预警过早,使误报率升高,驾驶员接受度降低;预警过迟,不能在危险工况下对驾驶员及时发出预警,起到良好预警效果。研究表明[12],报警阈值的设定应充分考虑不同场景下驾驶员反应时间及车辆制动性能的影响,考虑到同类型车辆制动性能差别较小,本文中主要考虑驾驶员反应时间影响,报警TTC 阈值设定为1 级制动TTC 阈值加上当前车速下的驾驶员反应时间,当前车速下的驾驶员反应时间由上文通过模拟驾驶实验对驾驶行为特性的分析得到。AEB 制动阈值的设定,更多考虑安全性及实际道路条件的限制,分级制动策略能够更好兼顾安全性与警示作用,当前得到广泛应用。本文采用分级制动策略,结合驾驶行为分析结果,1 级制动TTC 阈值取2.3 s,制动减速度为-2 m/s2,2 级制动TTC 阈值取1.3 s,制动减速度为-7 m/s2。
3 仿真及结果分析
搭建PreScan/Simulink 联合仿真平台,在PreScan软件中搭建一条双向4 车道直行城市道路,在路口合适位置设置斑马线及路侧停放车辆,仿真实验车辆搭载毫米波、摄像头传感器实现对前方行人目标的探测感知,控制策略运行于Simulink 中,对本文所提避撞策略进行仿真实验验证。实验工况设置为:车辆与行人初始距离为50 m,行人过街速度为1 m/s,自车车速为50 km/h,搭建好的仿真实验场景如图5 所示,图5 中左侧界面用于实时反映车载传感器对行人目标的探测情况,右侧界面展示了从驾驶员视角、鸟瞰视角和后方视角的实时仿真过程。
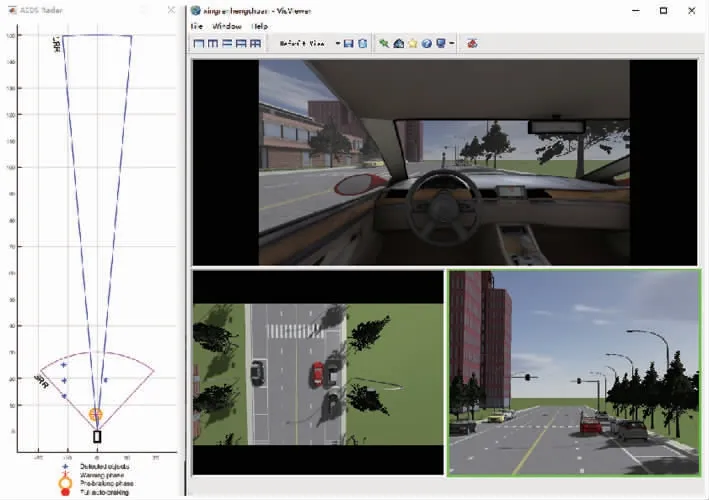
图5 仿真实验场景界面
仿真结果如图6 所示,图6a 为车辆与行人相对距离;图6b 为系统工作状态;图6c 为TTC 变化情况。

图6 仿真结果
由图6b 可以看出,在0~0.8 s 内,系统工作状态未激活,发出信号值为0,系统无报警,无制动;由图6c可以看出,大约在0.85 s 时,TTC 小于当前车速下的系统报警阈值2.8 s,此时进行预警提醒,包括语音提醒和振动,系统发出信号值为1,无制动;约在1.35 s 时,触发1 级制动,系统发出信号值为2,开始以-2 m/s2减速度减速制动,车辆此时仍向前运动;约在2.4 s 时,触发2 级制动,系统发出信号值为3,开始以-7 m/s2减速度减速制动,直到3.9 s 行人横穿街道完成,系统判定碰撞风险消失,相对距离设为100 m,TTC 值设为10 s,系统工作状态恢复至未激活状态;由图6a 可以看出,实验过程中相对距离最小值约为2.1 m,能够实现车辆与斑马线过街行人的安全避撞。
4 结论
针对城市道路斑马线行人横穿过街危险工况,开展模拟驾驶实验进行驾驶行为特性分析,基于行人避撞安全性分析,提出了智能汽车纵向避撞控制策略。为验证控制策略的有效性,搭建PreScan/Simulink 联合仿真平台进行仿真实验验证,实验结果表明,系统能够根据不同车速下的驾驶员反应时间合理进行碰撞预警,驾驶员如未及时做出反应,能够通过减速制动方式避免与横穿行人的碰撞。相关研究可为智能汽车决策系统开发提供有价值的技术参考。