间歇控制下时滞竞争神经网络指数同步探究∗
2021-10-10梅雪晖刘宝吴黎军
梅雪晖,刘宝,吴黎军
(新疆大学 数学与系统科学学院,新疆 乌鲁木齐 830046)
0 引言
竞争神经网络模型是一类重要的无监督突触修饰神经网络,它包含两种状态变量,短期记忆变量(STM)描述快速神经活动,长期记忆变量(LTM)描述缓慢的神经活动.自1983年Cohen和Grossberg[1]首次提出了竞争神经网络以来,出现了很多关于竞争神经网络的研究,如不同时间尺度竞争神经网络[2−5]、时变分布时滞竞争神经网络[6,7]、无监督竞争神经网络[8]、不同时间尺度和随机扰动下竞争神经网络[9]、具有不连续激活函数的时滞竞争神经网络[10]、具有不同时间尺度和时变延迟的竞争神经网络[11].
此外,同步是一种典型的集体行为,它在生物进化、化学反应、安全通信等方面应用广泛.1990年,其开创性的研究工作由Pecora和Carroll[12]提出,自此竞争神经网络的同步问题受到了越来越多学者的关注.Lou与Cui[4]研究了一类竞争神经网络的指数同步问题,利用线性矩阵不等式方法、Lyapunov函数法、牛顿-莱布尼兹公式,设计了一些指数同步准则.Gu[9]设计了一种自适应反馈控制器,以实现具有不同时间尺度和随机扰动的耦合时滞竞争神经网络的完全同步,利用随机微分时滞方程的Lasalle不变性原理,研究了误差动态系统的全局几乎确定的渐近稳定性.Gan[11]研究了一类具有不同尺度时变时滞的竞争神经网络的同步问题,提出了一种新的延迟划分方法,推导了一种保证响应系统与驱动系统同步的延迟相关条件,通过求解线性矩阵不等式,可以实现线性反馈控制器增益矩阵的设计.Zhang等人[13]研究了混合脉冲和切换控制下复杂动态网络的同步问题.研究表明,许多大型复杂动力网络都表现出集体同步运动,可利用脉冲控制的概念和脉冲系统的稳定结果,建立该模型的脉冲同步新准则.
近年来,间歇控制等非连续反馈控制策略在交通、通信等工程中得到了广泛的应用[14−16].因此,对于间歇控制方法的研究十分必要,如文献[17]采用周期性间歇非线性反馈控制方法,对一类具有时滞的非线性混沌系统进行同步,基于Halanay不等式和Lyapunov泛函理论等方法,推导出了一些同步准则,并得到了保证非线性系统无延迟同步的充分条件.文献[18]用周期间歇控制方法研究了一类非线性系统的指数稳定问题,给出了一组线性矩阵不等式的指数稳定判据,以及由三个标量不等式确定的一个简单的充分条件.在控制周期和控制宽度固定且已知的前提下,针对一般成本函数设计了次优间歇控制器,并用数值模拟验证了理论结果.文献[19]采用周期间歇控制方法研究了延迟混沌神经网络的指数稳定问题,利用Lyapunov函数和Halanay不等式,建立了受控神经网络的指数稳定准则及其简化形式,对控制参数的可行域进行了严格的估计.理论结果和数值模拟表明,采用非零持续时间的间歇反馈控制可以稳定连续时间的时滞混沌神经网络.
本文在以上研究的基础上考虑了具有时变时滞的竞争神经网络模型,利用微分不等式分析方法和Lyapunov函数方法,讨论了具有时滞的竞争神经网络的全局指数同步条件,并建立了相应的判别准则,同时,也研究了既满足大时滞也满足小时滞的时变时滞和间歇控制的竞争神经网络的指数同步问题,并建立了一些充分性条件.最后,通过仿真实例验证了所提出方案的正确性和有效性.
1 模型建立及预备知识
考虑如下具有时滞的竞争神经网络
其中:P为受到外部刺激的神经元个数,N为STM状态下的联接神经元个数,xi表示神经元当前被激活水平,fi(·)表示神经元输出函数,mij(t)记为有效联接,ai>0为神经元激活常数,σj记为外部刺激权重,bi代表外部刺激程度,ci>0为任意常数,dik代表第i个和第k个神经元之间的联接权重,代表第i个和第k个神经元之间时滞反馈的联接权重,τ为时滞常数,ε>0表示STM状态下的时间尺度.

其中:g(e(t))=f(y(t))−f(x(t)),g(e(t−τ))=f(y(t−τ))−f(x(t−τ)).
假设1存在一对称正定阵L=(lij)m×n,对任意x,y ∈Rn,有‖f(x)−f(y)‖≤L‖x−y‖.
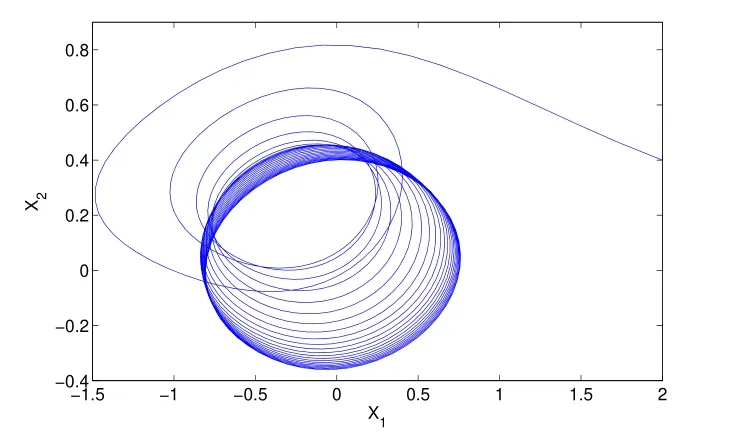
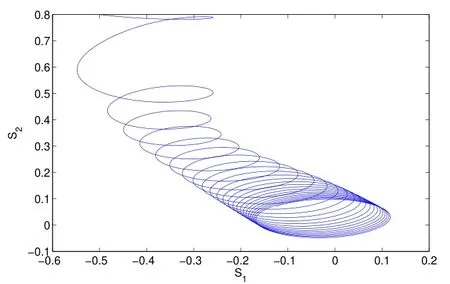
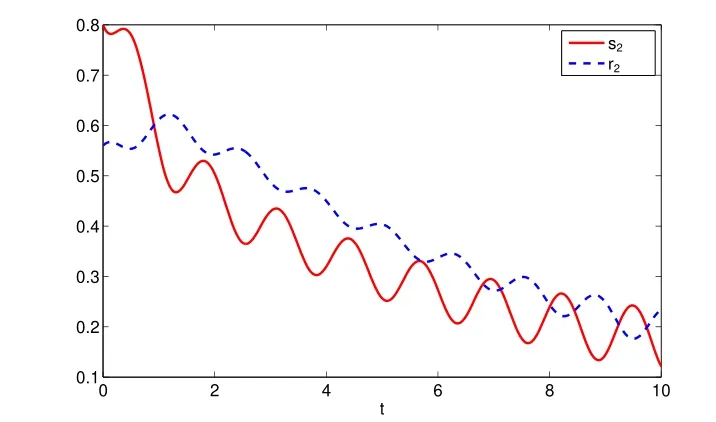
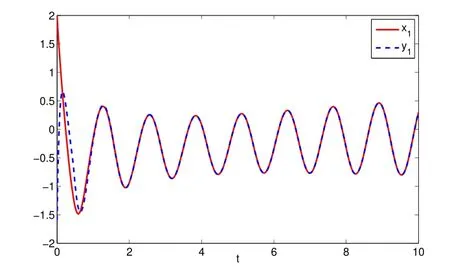
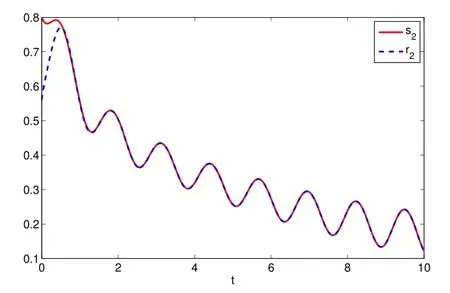
假设2时滞τ 这与不等式(14)矛盾.因此,(13)成立. 对于t ∈[T+δ,2T),利用相似的方法,我们得到W(t) 注记1在引理5中,问题对τ <δ与τ ≥δ这两种情况都成立.也就是说,此引理中,我们仅仅要求τ 由假设2,存在Vτ≥V0. 下面利用数学归纳法证明. 情形2:对于0 <δ <τ 注记2在定理1中,我们通过τ和δ之间的大小关系,分两部分证明了定理的结论.对于小时滞(τ<δ)的情况,只需利用引理3和引理4,即可得到系统达到同步的条件.对于τ ≥δ的情况,由于不能直接由引理3和引理4得到相应的结果,因此,我们给出了引理5,根据引理5,可以直接获得系统达到同步的相关准则.在文献[17]中,作者只考虑了τ<δ(小时滞)的情况,给出了一些间歇控制同步准则.显然,本文结论比文献[17]更具一般性. 注记3本文所选择的控制器ui(t),i=1,2均为线性间歇控制器.而在实际应用中,对于非线性间歇控制器也有类似的结论.例如,选择 只需假设连续函数Q(·)满足条件eT(t)Q(e(t))≤eT(t)Q1e(t),zT(t)Q(z(t))≤zT(t)Q2z(t). 特别地,如果模型(3)中的神经元传输函数不存在时滞,则模型(3)退化为以下形式 其中:g(e(t))=f(y(t))−f(x(t)). 推论1若假设1成立.如果存在正常数α1,α2,εi,µi(i=1,2,3)以及正定矩阵Q1,Q2满足以下条件 则系统(27)和(28)在间歇控制协议下实现同步. 证明构造Lyapunov函数V(t)=eT(t)e(t)+zT(t)z(t),当t ∈[nT,nT+δ)时,关于V(t)求导数得 注记4在推论1中,我们要求0<δ 推论2若假设1、2成立,如果存在正常数α1,εi(i=1,…,4)以及正定矩阵Q1,Q2满足以下条件: 则系统(3)和系统(4)在控制器(32)下实现同步. 此动力行为系统的初始条件为x(0)=(2,0.4)T,S(0)=(−0.5,0.8)T,运行结果如图1,图2所示. 图1 x(t)的相图 图2 S(t)的相图 考虑主系统(33)与从系统(34)的同步性 其中:y(t)=(y1(t),y2(t))T,R(t)=(r1(t),r2(t))T.初始条件为y(0)=(−1.6,0.6)T,R(0)=(0.2,0.56)T,xi(t),yi(t),si(t)和ri(t)(i=1,2)的状态如图3~图6呈现了无控制的情况.显然,未控制下主从系统的轨线是不同步的. 图3 x1(t) 和y1(t) 的状态 图4 x2(t) 和y2(t) 的状态 图5 s1(t)和r1(t)的状态 图6 s2(t)和r2(t)的状态 通过对定理1的分析可知,在选取适当条件时,系统在周期间歇控制(5)和(6)下,主系统(33)与从系统(34)将趋于同步.为简便起见,我们在本例中选择了Q1=3.5I,Q2=3I,ε1=µ1=2,ε2=µ2=1,ε3=µ3=0.5,ε4=µ4=0.25.简单计算后可知定理1的条件(1)~(4)成立.此外,选择δ=2,T=3,定理1的条件(5)(i)也成立.故本例选择δ=2,T=3,在周期间歇控制(5)和(6)下,xi(t),yi(t),si(t)与ri(t)的形态轨线如图7~图10所示,其中i=1,2,此时主从系统趋于同步十分明显. 图7 x1(t)和y1(t)的状态 图8 x2(t)和y2(t)的状态 图9 s1(t)和r1(t)的状态 图10 s2(t)和r2(t)的状态 本文在非零持续时间的间歇反馈控制可以稳定到连续时间的时滞神经网络的基础上,考虑了具有时变时滞的竞争神经网络模型.利用微分不等式分析方法和Lyapunov函数法,讨论了具有时滞的竞争神经网络的全局指数同步条件,并建立了相应的判别准则.同时,也研究了既满足大时滞又满足小时滞的时变时滞和间歇控制的竞争神经网络的指数同步问题,建立了一些充分性条件,并通过仿真实例验证了所提出方案的正确性和有效性.

2 间歇控制下竞争神经网络的指数同步准则








3 数值实例与仿真






4 结论
