基于视觉技术的智能快递分拣小车的研制
2021-10-10朱铝芬羊井广
朱铝芬,羊井广
(南京信息职业技术学院,江苏 南京 211100)
0 引 言
2019年12月,武汉地区爆发新型冠状病毒,随后蔓延至全国各地。抗击疫情,快递物流行业在国计民生中的战略地位显著突出。居民隔离在家,电子商务的需求急速攀升,快递包裹量与日俱增,各大快递公司面临着机遇与挑战,如何快速分拣包裹,是快递公司提高效率的关键所在。抗疫阶段,快递包裹、募捐物资被投送到全国各地,快递安全与市民健康息息相关,使用智能快递分拣小车可以降低人口密集度与分拣人员感染概率,同时提高分拣、物流效率,将物资及时、安全地送到千家万户。
目前国内市场上出现了一些智能快递分拣小车,但其分拣系统结构复杂、功能庞杂。快递智能自动分拣系统采用C/S架构,分为智能终端和信息系统两大模块,两者根据TCP/IP协议建立连接[1]。但这类智能分拣小车价格昂贵,不适用于小型物流公司。本文针对快递行业中小型快递公司的需求,设计了一款基于视觉技术的智能快递分拣小车[1-2]。
1 方案设计
智能快递分拣小车的设计架构如图1所示。智能快递分拣小车由主控器、红外循迹模块、视觉检测模块、电机驱动器、液晶显示模块、急停按钮等组成。小车将STM32作为主控器,通过相机扫描快递二维码信息,读取信息后发送给主控器,由主控器对二维码进行智能识别处理,获取快递目标投递位置并规划最优路径;通过红外反射光电开关传感器使小车沿着规划的路线行走;由直流电机驱动模块控制直流电机的转动,使载物小车前进、后退或转弯;到达目的地后,自主倾倒快递载重盘,实现快递的自主投放;小车完成包裹投放后,自主返回起始地点进行下一轮的快递分拣;主控器实时跟踪小车,由显示模块实时显示小车的当前位置及目标位置;出现紧急情况时,通过急停按钮停止小车运行,实现安全保护[3-4]。
2 硬件设计
2.1 基于视觉技术的货物检测模块设计
智能小车采用百万高清CMOS传感器制作的OV2640摄像头灵敏度高,支持JPEG/RGB 565格式输出,可以精准采集货物二维码信息,由主控器STM32将信息处理后转换为货物的目标位置,并规划合理的投递路径[5-6]。
货物检测模块电路如图2所示。
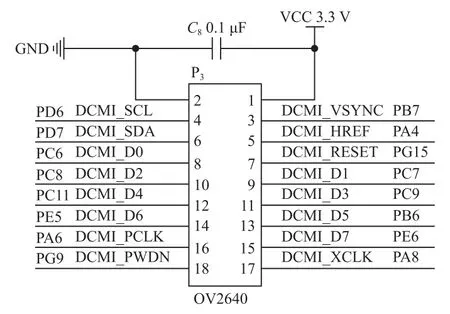
图2 货物检测模块电路
2.2 自主循迹模块设计
区域坐标采用白底黑色的引导线进行设计,智能小车前方的4个传感器利用红外循迹技术识别小车前进路线上的黑线。若4个红外光电检测器输出均为低电平,即红外检测开关均未扫描到黑线时小车前进;若左下角检测到黑线时,说明小车右偏于中心黑线,此时驱动小车左转;若右下角检测到黑线时,说明小车左偏于中心黑线,此时驱动小车右转,小车恢复与中心黑线平行的方向,沿着中心线前进[7-9]。
红外循迹电路如图3所示。

图3 红外循迹电路
2.3 电机驱动模块设计
设计中采用L298N模块驱动直流电机,通过单片机的I/O口输出信号。电机驱动模块电路如图4所示。
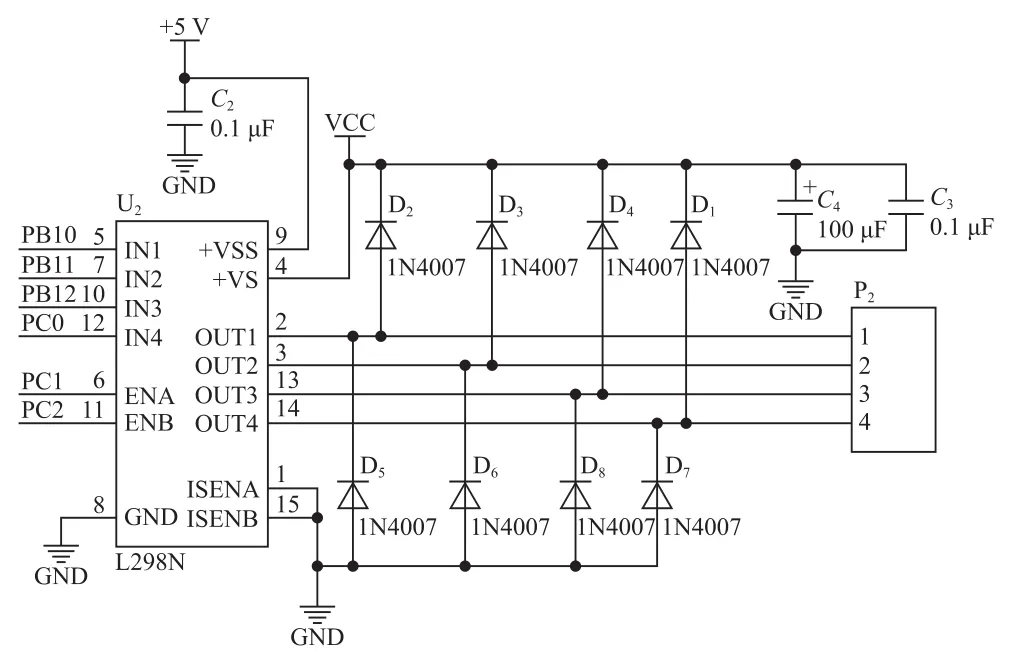
图4 电机驱动模块电路
2.4 位置显示模块设计
智能小车通过主控器STM32将OV2640摄像头采集的二维码信息转换为货物投放的目标坐标信息。当4个红外开关均输出高电平时,即小车经过一个坐标点,STM32及时更新当前位置坐标信息,并将目标位置、当前位置的坐标信息显示于LCD1602液晶显示屏[10-11]。位置显示模块电路如图5所示。
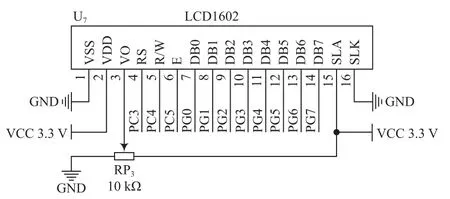
图5 位置显示模块电路
3 软件设计
为实现快递的准确分拣及精准投递,需进行相应的控制程序设计,流程如图6所示。

图6 主程序流程
4 调试与优化
通过软硬件联调,实现了快递分拣的基本功能,红外循迹测试如图7所示。
图7 红外循迹测试
5 结 语
本文设计的智能小车通过OV2640摄像头自主识别货物上的二维码信息,单片机将二维码信息转换为货物的目标位置,小车通过红外循迹自主运行至目标位置,完成卸货后将信息反馈至单片机,单片机控制小车自主返回原点,实现货物的循环分拣。
但是本设计还存在很多不足。当发生故障时,仅做了急停处理并未诊断故障。考虑在智能快递小车中加入遥控装置,当红外循迹出现故障时,可以通过遥控方式控制小车的移动[12-13]。
