基线3 ETCS列控系统平交道口功能研究
2021-10-09王建敏张友兵
王建敏,张友兵
(1.北京全路通信信号研究设计院集团有限公司,北京 100070;2.北京市高速铁路运行控制系统工程技术研究中心,北京 100070)
平交道口是指铁路和公路在同一平面上的交叉路口,其在铁路运输当中属于比较重要而特殊的一个部分,是整个交通网络当中,唯一存在公路和铁路路权冲突的区域。因此,平交道口属于事故易发地段,一旦发生事故,直接威胁到人们的生命安全,甚至还会造成大范围严重事故。
基线3 的ETCS 列控系统新增了平交道口功能,对于未受保护的平交道口,需要车载设备对平交道口进行安全防护。本文站在车载设备的角度,研究车载设备如何对未受保护的平交道口进行安全防护。
1 ETCS系统的平交道口功能
在基线3 的ETCS 列控系统中,可以通过地面应答器或无线闭塞中心向车载设备传递列车前方的平交道口信息。如果地面设备工作正常,且已经对平交道口进行安全防护,地面设备告知车载设备平交道口受保护,车载设备对受保护的平交道口不再进行额外的安全防护。如果地面设备存在故障,未对平交道口进行安全防护,应告知车载设备平交道口未受保护,车载设备对未受保护的平交道口进行安全防护,将平交道口限制速度纳入车载设备实时监控的最限制速度曲线,保证列车以不高于平交道口限制速度的速度通过平交道口。
如果由于地面设备故障等原因,地面设备向车载设备发送未受保护的平交道口信息,车载设备对平交道口进行安全防护。在列车通过平交道口前,地面设备故障恢复,平交道口重新受到保护,地面设备向车载设备发送编号相同的受保护的平交道口信息,车载设备不再对该平交道口进行安全防护。
平交道口信息以线性数据提供给车载设备,包括平交道口起点位置和平交道口区域长度。平交道口信息包含一个编号,如果车载设备收到一条新的平交道口信息,新收到的平交道口编号与之前收到的平交道口编号相同,新收到的平交道口信息替代之前收到的平交道口信息。地面设备应指示平交道口是否受到保护。如果平交道口受保护,车载设备不对该平交道口进行额外的安全防护;如果平交道口不受保护,应通知车载设备通过平交道口的允许速度和列车是否需要在平交道口前停车。如果列车需要在平交道口前停车,还需要提供平交道口前停车区域。
2 平交道口安全防护的基本需求
2.1 平交道口监控流程
在完全监控模式(Full Supervision,FS)、有限监控模式(Limited Supervision,LS)和目视模式(On Sight,OS)下,车载设备对不受保护的平交道口信息进行安全防护。如果需要在平交道口前停车,则列车先停车再通过平交道口;如果不需要在平交道口前停车,则列车可以不停车通过平交道口。车载设备对平交道口进行监控的过程如图1 所示。
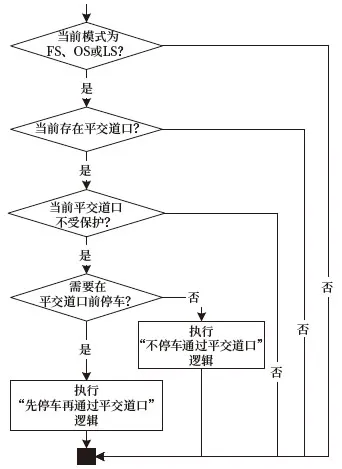
图1 平交道口监控流程Fig.1 Flowchart of supervision and control of level crossings
2.2 需要在平交道口前停车
收到未受保护且需要在道口前停车的平交道口信息后,车载设备将平交道口起点临时当作行车许可终点(End of Authority,EoA)和监控点(the Supervised Location,SvL)进行监控。当列车停车后,如果列车估计前端位于平交道口前的停车区域,车载设备停止将平交道口起点作为EoA 和SvL 进行监控,而是从列车估计前端所在位置开始,将平交道口限制速度纳入最限制速度曲线(Most Restrictive Speed Profile,MRSP)。此时,平交道口类似于一种特殊的临时限速区域,限速区域起点为停车后的列车估计前端所在位置,限速区域终点为平交道口区域终点,限速区域的允许速度为平交道口的允许速度。
2.3 不需要在平交道口前停车
收到未受保护且不需要在道口前停车的平交道口信息后,车载设备将平交道口起点临时当作EoA 和SvL 进行监控,直到列车最大常用制动曲线(Service Brake Intervention,SBI)速度降到平交道口限制速度时,车载设备停止将平交道口起点作为EoA 和SvL 进行监控,而是从列车估计前端或列车最大安全前端所在位置开始,将平交道口限制速度纳入MRSP 曲线。此时,平交道口也类似于一种特殊的临时限速区域,限速区域起点为SBI 速度降到平交道口限制速度时的列车估计前端或列车最大安全前端所在位置,限速区域终点为平交道口区域终点,限速区域的允许速度为平交道口的允许速度。
列车SBI 速度降到平交道口限制速度时,如果最严格的SBI 监控曲线来自于SBI1,则限速区域起点为列车估计前端;如果最严格的SBI 监控曲线来自于SBI2,则限速区域起点为列车最大安全前端。
3 平交道口监控信息的使用
3.1 监控平交道口起点
收到未受保护的平交道口信息后,车载设备需要临时将行车许可缩短到平交道口起点,即将平交道口起点作为EoA 和SvL 进行监控。同时,车载设备还需要及时更新人机界面(Driver Machine Interface,DMI)运行计划区的行车许可长度,将DMI 显示的行车许可终点缩短到平交道口起点,保证车载设备实际监控的EoA 和SvL 与显示给司机的EoA 和SvL 保持一致。
需要将平交道口限速纳入MRSP 时,车载设备停止将平交道口起点当作EoA 和SvL 进行监控。同时,车载设备同样需要及时更新DMI 运行计划区的行车许可长度,保证车载设备实际监控的EoA和SvL 与显示给司机的EoA 和SvL 保持一致。
3.2 监控平交道口限制速度
需要将平交道口限速纳入MRSP 时,车载设备需要将来自平交道口的限速起点、限速终点和限制速度融入最限制速度曲线中,根据包含了平交道口限速的最限制速度曲线监控列车运行,保证列车以不超过平交道口限速的速度通过平交道口。列车前端越过平交道口终点时,车载设备停止将平交道口限速纳入MRSP,即车载设备不再监控已经经过的平交道口的限制速度。
3.3 显示平交道口提示信息
将平交道口起点作为EoA 和SvL,或者将平交道口限速纳入MRSP 中,车载设备需要向DMI 发送文本信息“平交道口不受保护”,向司机提示列车前方存在不受保护的平交道口。虽然此时车载设备对平交道口的限速信息进行监控,保证列车以不超过平交道口限速的速度通过平交道口,但是由于平交道口是铁路和公路的交叉点,可能会发生各种意外情况,需要司机注意观察,随时准备制动停车。
4 典型场景举例
4.1 停车后通过平交道口
如图2 所示,举例说明列车通过需要停车的平交道口,其中A 点为平交道口前的停车区域的起点,B 点为列车实际停车位置,C 点为平交道口起点,D 点为平交道口终点,A-C 之间为平交道口前的停车区域,C-D 之间为平交道口区域。

图2 列车停车后通过平交道口Fig.2 A train stops before passing through a level crossing
列车通过需要停车的平交道口过程如下。
1) 列车以FS、LS 或OS 在线路上正常运行。
2) 列车经过包含平交道口信息的应答器组,或通过无线从无线闭塞中心收到平交道口信息。
3) 平交道口未受保护,车载设备将平交道口起点(C 点)当作EoA 和SvL 进行监控。DMI 显示提示信息“平交道口不受保护”。从DMI 界面可以观察到,DMI 运行计划区的行车许可长度缩短到平交道口起点(C 点)。列车继续向前运行,行车许可长度逐渐缩短,允许速度逐渐降低。
4) 列车逐渐接近平交道口起点(C 点),允许速度越来越低,列车停车(B 点),列车估计前端位于平交道口前的停车区域(A-C 区域)。车载设备停止将平交道口起点(C 点)当作EoA 和SvL 进行监控,而是将平交道口限制速度纳入MRSP,监控列车运行,限速起点为停车后的列车估计前端位置(B 点),限速终点为平交道口区域终点(D 点)。由于不再将平交道口起点当作EoA 和SvL,行车许可延伸。
5) 列车以不超过平交道口限速的速度通过平交道口,此时允许速度为平交道口限速。
6) 列车最小安全前端越过平交道口终点(D点),允许速度抬升(由于列车越过平交道口,车载设备不再将平交道口限速纳入最限制速度曲线,最限制速度曲线抬升),DMI 停止显示提示信息“平交道口不受保护”。自此,车载设备完成对平交道口的监控。
4.2 不停车通过平交道口
如图3 所示,举例说明列车通过不需要停车的平交道口,B 点为车载设备实时监控的SBI 曲线和平交道口限速交点对应的位置,C 点为平交道口起点,D 点为平交道口终点,C-D 之间为平交道口区域。
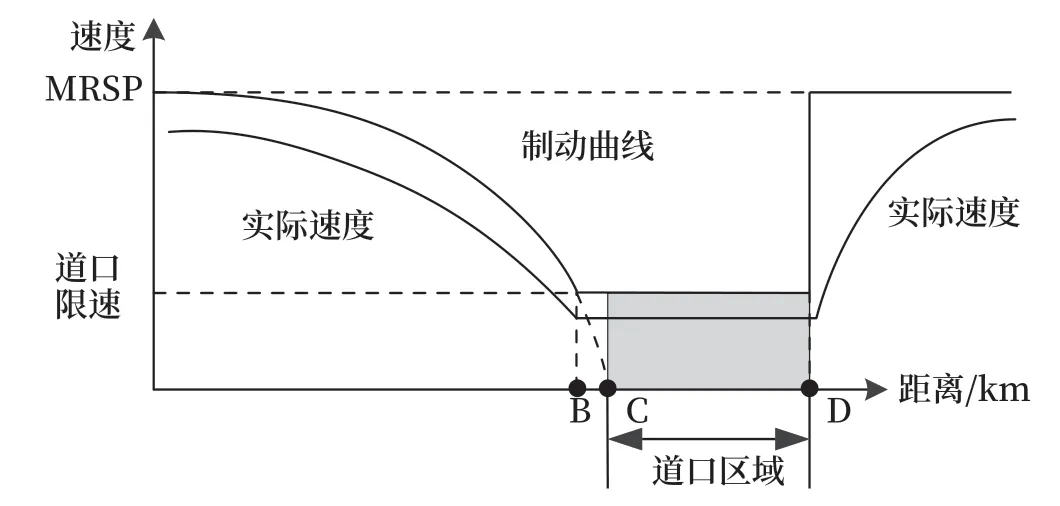
图3 列车不停车通过平交道口Fig.3 A train passes through a level crossing without stopping
列车通过不需要停车的平交道口的过程如下。
1) 列车以FS、LS 或OS 在线路上正常运行。
2) 列车经过包含平交道口信息的应答器组,或通过无线从无线闭塞中心收到平交道口信息。
3) 平交道口未受保护,车载设备将平交道口起点(C 点)当作EoA 和SvL 进行监控。DMI 显示提示信息“平交道口不受保护”。从DMI 界面可以观察到,DMI 运行计划区的行车许可长度缩短到平交道口起点(C 点)。列车继续向前运行,行车许可长度逐渐缩短,允许速度逐渐降低。
4) 列车逐渐接近平交道口起点(C 点),允许速度越来越低。当车载设备实时监控的SBI 速度降低到平交道口限速时(B 点),车载设备停止将平交道口起点(C 点)当作EoA 和SvL 进行监控,而是将平交道口限制速度纳入MRSP,监控列车运行,限速起点为列车估计前端或列车最大安全前端所在位置(B 点),限速终点为平交道口终点(D 点)。由于不再将平交道口起点当作EoA 和SvL,行车许可延伸。
5) 列车以不超过平交道口限速的速度通过平交道口,此时允许速度为平交道口限速。
6) 列车最小安全前端越过平交道口终点(D点),允许速度抬升(由于列车越过平交道口,车载设备不再将平交道口限速纳入最限制速度曲线,最限制速度曲线抬升),DMI 停止显示提示信息“平交道口不受保护”。自此,车载设备完成对平交道口的监控。
5 总结
本文介绍了在ETCS 列控系统中,车载设备如何对平交道口进行安全防护,保证列车和平交道口安全的方法。这种方法已经应用到基线3 ETCS 列控系统的开发中,经过试验,证明可以对平交道口进行安全防护,控制列车以不超过平交道口限速的速度通过平交道口,保证平交道口安全的同时,列车可以安全高效地通过平交道口,提高运输效率。
