六轴工业机器人的运动学分析
2021-10-08朱奕锟
朱奕锟
(武汉纺织大学 机械工程与自动化学院,湖北 武汉 430073)
1 六轴工业机器人的介绍
通过研究六轴工业机器人的动力学结构设计能够较为明显地减轻机器人的重量。同时因为大臂是中空的结构,所有的外接设备以及电缆都可以放在大臂之中,这样一来,机器人的场地适应能力增强,大大提升了机器人的灵活程度。六轴工业机器人的安装是比较简单实用的,如果正常使用的话,则采取正装的方法;如果需要倒立安装,则应该安装在天花板上。以FANUC ARC100i 型六轴工业机器人为例,其常规自由度数为6,重复定位精度为0.08,臂腕处的负载为6kg。
2 六轴工业机器人的数学理论基础研究
想要操作工业机器人,需要控制工业机器人的末端操作器,利用操作器来操作相关的零件与工具在空间之中进行运动,常常采用的方法便是将问题放到坐标系之中技能型研究进行坐标系的定义和表述。
2.1 位置、姿态与坐标系
选定一个坐标系,并采用3×1 的位置矢量来任意选定坐标系中的某一点。采用三个互相正交的单位矢量来表示直角坐标系{A},点AP 的位置由一个矢量来表示,其中AP 表示点P 相对于直角坐标系中{A}的位置,即AP=[PxPYPZ]。
其中图1 表示的是AP 相对于坐标系的位置。
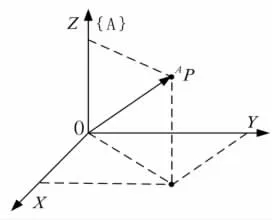
图1 AP 相对于坐标系的位置
空间中某个点的位置都可以采用矢量的方法进行表示,重新建设一个新的直角坐标系{B},坐标系{B}的原点重合于点P,用XB、YB、ZB来表示直角坐标系{B}中X、Y、Z三轴的单位矢量。AXB、AYB、AZB则是采用直角坐标系{A}下进行表达,此直角坐标系下组成的旋转矩阵采用ABR 来表示,即
图2 表示的是新建坐标系与原有坐标系之间的位置关系。

图2 位置关系确定
构建坐标系来确定位置关系的主要目的是准确描述机械臂的位置,通过确定空间坐标系下的三个矢量,来组合成一个完整的坐标系位置矢量。
2.2 坐标映射
在两个坐标系位置相同的情况下,对于位于不同坐标系中的矢量通常会采用平移的手段来进行处理。但是除了平移之外,坐标系还可以绕X、Y、Z 三轴进行旋转。常规坐标系的映射是指两个坐标系的原点不重合,存在着一定的矢量偏移,必须要同时经过平移以及旋转才能够保证两个坐标下进行重合,其内容采用公式表示为以下内容:

3 建模分析
3.1 连杆参数及其数据分析
由于六轴工业机器人是一个连杆机构,因此,在本文章的研究过程中需要将其理解成为开环系统进行分析,整个系统具有六个转动关节、六个连杆。在整个系统之中基座并不属于连杆结构的范畴,为此可以将基座命名为连杆0 号,然后按照数字顺序从1 到6,来命名剩余的连杆部位。将基座标系与工业机器人的固定底座连接到一起,并且在每个坐标系中建立一个标准的坐标系,然后将坐标系之间通过齐次变换矩阵,矩阵中的元素通过连杆长度、连杆转交、连杆偏距以及关节角四个连杆参数内容进行组成。
如图3 所示,i 为中间的连杆,i-1 以及i+1 分别代表i 连杆左右两边的相连接连杆。其中的垂线长度由a 表示,评价夹角由α 来表示,连杆之间的间距则是由d 表示,平面之间的夹角则是由θ 表示。根据六轴工业机器人的结构顺序,可以将腰结构命名为关节1,转角命名为θ1。肩结构则是命名为关节2,转角命名为θ2。以此类推,则是对六轴工业机器人的整个结构进行关节命名。下面则是构建坐标系,沿着关节轴画出延长线,其中轴线i 以及轴线i+1 之间画出公垂线,并将其与关节轴i 进行连接,连接的交点作为坐标系的原点,将关节轴i 作为z轴,公垂线作为x 轴方向,y 轴则是采用右手定则来判断而出。当六轴工业机器人的第一关节矢量为0 的时候,一坐标系与0 坐标系重合在一起,此时六轴工业机器人的连杆所构成的坐标系则是如图4 所示。

图3 相邻连杆改进的D-H 参数

图4 六轴工业机器人的连杆坐标系
根据六轴工业机器人的使用说明,将各个连杆的起始位置参数整合在一起,如表1 所示。

表1 六轴工业机器人的D-H 参数数据表格
3.2 根据坐标线构建运动学方程
为了让图解清晰以及方便描述,每个连杆定义为三个中间坐标系,分别为坐标系P、坐标系Q、坐标系R,如图5 所示。在确定完坐标系之下,则是标出x 轴以及z轴,因为坐标系以及轴之间存在着空间位置的关系,为了区分,可以采取如下方法。

图5 D-H 坐标系
首先,坐标系R 与坐标系i-1 之间的空间位置可以通过i-1 轴旋转α 来得到。坐标系Q 以及坐标系R 则是可以由轴i-1 在位移a 距离之后得到。坐标系P 以及坐标系Q 则是可以由i-1 轴通过位移距离d 之后得到。坐标系i 以及坐标系P 则是由i-1 轴通过旋转θ 得到。在确定各个坐标系以及轴的位置之后,在矩阵的基础上,采用齐次变换的方式来对坐标系来对工业机器人进行平移与旋转,并尝试利用链式的原理,将相对坐标系的矩阵进行变换,即
通过对上面的公式进行平移、旋转等变换时,可以发现,每个公式所包含的连杆参数只有一个,这表明图5 之中的坐标系,可以表示为以下公式:

将各个参数代入到变换的矩阵之中便可以计算出一般表达式,一般表达式如下。

想要获得机器人肘关节六个变化的参数,需要对其建立坐标系,并通过分析坐标系的连杆参数。我们可以将这些变量分别进行命名,采用符号加上数字的形式,如θ1、θ2、θ3、θ4、θ5、θ6。对于基座的末端操纵器来讲,想要实现矩阵变换,也应该围绕上述六个参数开展,其表达公式则是如下所示:

此函数是关于六轴工业机器人六个关节变量的函数,根据此关节变量函数可以推断出其他变换矩阵的表达公式如下所示:

4 运动学研究
通过上面的分析,我们已经知道了机器人的连杆参数以及肘关节转动的角度,加之已经求得末端操作器的位置矩阵方程,那么只需要将这些内容代入到运动学方程中,并对得到的方程进行矩阵变换,便可以求出相对于远点的坐标系矩阵方程,即为下面的公式:

在上述的表达公式中,Px、Py、Pz分别表示末端操作器的位置。nx、ny、nz、ox、oy、oz、ax、ay、az分别表述末端操作器的姿态。如果将六轴工业机器人的各个关节角分别命名为θ1、θ2、θ3、θ4、θ5、θ6。将这些参数整合到公式之中,可以得到以下公式:

在这些公式之中,s1=sinθ1、c1=cosθ1、s23=sin(θ2+θ3)、c23=cos(θ2+θ3)。如果在初始位置过程时,工业机器人每个关节结构的变量都按照0 来计算,那么D-H 参数可以准确求出运动学公式的结果,如下面公式所示。

5 六轴工业机器人运动学仿真
5.1 六轴工业机器人建模
在建模过程中我们使用的是MATLAB 这款软件。这款软件主要是利用程序之中的算法,将复杂的数据进行复杂的计算,从而实现数据的可视化目的。实现数据可视化这一工程主要是因为该款软件具有图形处理的功能。这样一来,使用人员便可以从复杂的数学计算工作中脱离出来,而将这种数学计算的复杂任务交给该软件。同时,该软件除了数学计算的功能之外,还蕴含了其他大量的工具,这些工具在处理图形和构建数学模式上有着独特的优势。
5.2 六轴工业机器人正运动学仿真验证
本小节内容主要采用对比的方法来验证机器人的运动学方程是否正确。步骤如下,首先在了解工业机器人初始状态下各个关节轴转动角度的基础上,将这些参数代入到运动学方程之中,并将其输入到MATLAB 程序中,从而得出正确的答案。如果人工计算和软件计算的方式是一样的,那么可以验证答案为正确的,但是如果二者的答案不一样,这说明运动学方程是存在这样一定误差或者错误的。
计算结果如表2 所示。

表2
通过对表格进行深入分析,我们可以发现计算的答案与软件程度得到的答案是完全一致的,这说明文章中的工业机器人正逆运动学方程是正确的。
6 结束语
文章首先介绍了本文的研究对象为六轴工业机器人,分析了六轴工业机器人的数学内容,然后采用参数方法建立了运动学方程。通过齐次变换的形式推导出了答案。为了验证答案,利用了MATLAB 软件,最终证明正逆运动学方程式正确。将六轴工业机器人应用在实际的生产之中,能够有效提升生产的效率,对于中国现代化建设有着积极的意义。
