挖掘机液压控制系统的分析
2021-10-05田芝友王永刚宋海涛吕秀梅
田芝友,姜 鹏,王永刚,宋海涛,吕秀梅,4
(1.辽宁瀚石机械制造有限公司,辽宁 阜新 123000;2.凯码(上海)技术咨询有限公司,上海 200021;3.阜新市生态环境治理发展有限公司,辽宁 阜新 123000;4.阜新市产业技术研究院,辽宁 阜新 123000)
液压挖掘机是一种在露天矿山连续开采中广泛应用的设备,主要适用于大型露天矿高效地开采作业,具有高效连续作业等优点[1]。但是挖掘机能量利用率较低,据统计大型挖掘机的能量利率用还不到20%。随着近几年全球对资源的重视,越来越多的挖掘机制造厂商开始重视挖掘机的能源利用率问题。目前液压挖掘机大多采用全液压驱动模式,与开式回路相比,闭式回路更节约能源,但是在挖掘机的液压执行元件中,大多都为液压油缸,其中液压油缸更大部分为差动缸,因此闭式回路比较不适用于各种露天矿工程机械。因此,目前被采用的还是开式的液阻回路。
常见的多执行元件开式液阻回路可以分为2 大类,其中一类是不含定压差减压阀的简单液阻回路;另一类是含有定差压阀的负载敏感回路;负载敏感回路包括阀前压力补偿阀系统(LS 系统)和阀后压力补偿系统(LUDV 系统)。为此,针对开式液阻回路进行详细介绍,包括简单液阻回路中最常用的负流量控制与正流量控制液压回路,以及负载敏感回路中的阀前压力补偿阀系统(LS 系统)和阀后压力补偿系统(LUDV 系统)。
1 负流量控制回路
负流量控制回路(Negative Control System,负控制系统)是20 世纪70 年代开发出来的技术,因为其能效总的来说比定流量系统高,被生产商广泛采用。在国内中小型挖掘机上的应用至今仍十分普遍。负流量控制回路是液压泵的排量随着控制压力信号增大而减小,即控制压力与排量成反比[2]。
1.1 负流量控制回路与工作原理
负流量控制原理如图1。负流量控制回路液压系统包括负流量变量泵和六通换向阀。换向阀在阀组的中位回油通道上处设有1 个固定节流口,此时旁路流量q0流过节流口时建立压力p0,然后将p0引到泵变量机构来控制泵的排量V。
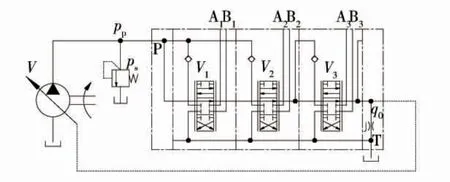
图1 负流量控制原理图
可根据节流阀的特性方程得出节流口前后的压力差:
式中:Q 为通过阀的流量,m/s;Cd为流量系数;A 为面的面积,m2;ρ 为油液密度,kg/m3;△p 为阀前后压差,Pa。
当回路中所有换向阀都在中位,液压泵提供的流量qP全部通过固定节流口进行卸荷,因此,通过节流孔产生的压力△p 也较高,此时△p=控制压力p0,在控制压力p0的作用下,泵的排量V 最小。当回路中任意一片换向阀处于最大开口时,液压泵提供的流量qP几乎全部进入执行元件,通过固定节流口进行卸荷的流量几乎为0,因此,通过节流孔产生的压力△p 也较低,此时△p=p0≈0,在控制压力p0的作用下,泵的排量V 最大,进入执行元件的流量最多,满足执行元件快速运动的要求。当多路换向阀的开口度处于中位和最大开口度之间变化时,液压泵在控制压力p0的作用下,排量也在最小和最大之间变化,且控制压力p0越大,液压泵的排量越小[3]。
1.2 负流量控制的响应时间
负流量控制可以减少多路阀在中位时液压泵的流量损失,使液压泵的输出流量按照操作者操作的换向阀主阀芯开度决定,做到按需提供[4],从而减少液压挖掘机中的溢流损失和由于溢流导致的系统产热。但是,负流量控制的不足之处在于,负流量控制回路的整个开启过程的时间顺序如下:换向阀动作→旁路口变小,导致泵出口压力升高→泵出口压力高于驱动压力后,有工作流量→旁路流量降低,控制压力减小→泵排量变大。这就使得泵的排量控制永远滞后于换向阀的动作。因此,操作时有滞后感,而且滞后随负载不同而变化。
2 正流量控制回路
正流量控制回路(Positive Control System)是20世纪80 年代的技术,即控制压力越高,则泵的输出流量越大。正流量变量泵的变量特性与负流量变量泵正好相反。
2.1 正流量控制回路与工作原理
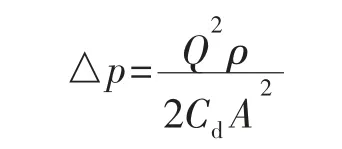
正流量控制原理如图2。正流量控制回路液压系统包括正流量变量泵和六通液控换向阀。推动操作控制换向阀的主阀芯换向的液控先导手柄(先导式减压阀),由于液控先导手柄为先导式减压阀,会将手柄偏转量成比例的转化为主换向阀的换向先导控制回路中的先导控制压力,此时,先导控制压力便会推动换向阀主阀芯移动。从而达到六通换向阀换向的目的。各操纵手柄的先导控制压力,通过梭阀进行压力比较,选出最高的控制压力pc。将控制压力pc引到泵变量机构的控制口,来控制泵的斜盘摆角,从而改变排量V。控制压力pc越高,则泵的排量V 越大。当pc=0 时,V 最小,只输出很少量的备用流量q0。当换向阀在中位时,旁路可以让让多余的备用流量q0通过[4]。在多路阀中设有溢流阀作为安全阀。
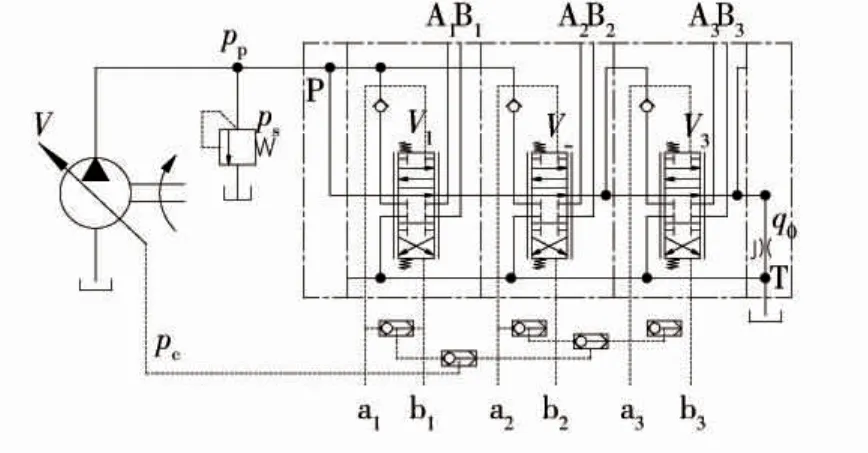
图2 正流量控制原理图
2.2 正流量控制的响应时间
在正流量控制回路中,只要推动先导液控手柄动作,输出控制压力,泵排量就会随之改变;同时,换向阀主阀芯也会随之动作,此时,换向阀的旁路口变小,工作口会打开;泵出口压力升高。
正流量控制回路还是使用六通换向阀,这点与负流量控制相同,只是没有旁路出口的节流口。因此,从负流量控制比较容易切换到正流量控制。
3 负载敏感系统
负载敏感系统发展于20 世纪80 年代的欧洲,在各执行元件同时工作时,流量的供给取决于操作手柄的开口度,而与负载大小无关[5]。根据定差压阀的位置,将负载敏感回路分为阀前压力补偿阀系统(LS 系统)和阀后压力补偿系统(LUDV 系统)。
3.1 阀前压力补偿阀系统
阀前压力补偿系统是负载敏感系统传统的压力补偿法,能够使各工作油口均可按主机构执行元件的要求,提供相应的流量,且保证执行机构的工作速度不受负载变化的影响。阀前补偿全负载敏感多路阀基于调速阀的工作原理。调速阀由定差减压阀和节流阀2 部分组成。负载敏感阀中的压力补偿器相当于调速阀中的定差减压阀,比例换向阀可以控制阀的开口度,相当于调速阀中的节流阀。阀前补偿控制系统如图3,定差减压阀(压力补偿阀)位于主阀节流口之前,压力补偿阀弹簧腔测压力为该回路的负载压力,但是负载敏感泵的负载敏感阀引入的压力为该系统通过梭阀比较后的最大负载压力。
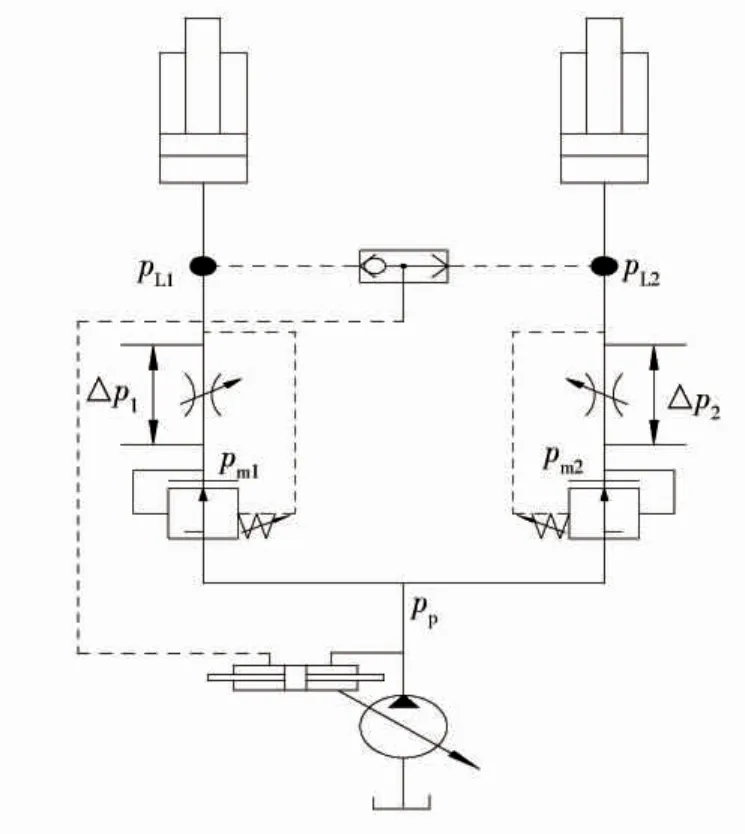
图3 阀前补偿控制系统
当通过所有阀的流量小于变量泵所提供的流量时,即流量没饱和时,通过的流量分配阀进入液压缸的流量可由下列计算公式得出[6]:
式中:Q 为通过阀的流量,m/s;Cd为流量系数;A 为阀的面积,m2;ρ 为油液密度,kg/m3;△p 为阀前后压差,Pa。
主阀节流口两端压差p1和p2为:
式中:pL1、pL2为系统负载压力,Pa;pm1、pm2为节流阀前压力,Pa。
因为压力补偿阀为定差减压阀,所以无论负载如何变化△p1=△p2,固通过的流量分配阀进入液压缸的流量与负载无关,只取决于节流阀的开口度,从而保证了,执行元件的运行相对速度不发生改变。
但是当多个执行器同时动作,其流量需要超过泵的供油流量(即流量饱和)时,高负载侧节流阀口两端压差下降,达不到补偿阀的设定压力,此时,补偿阀失去作用,系统进入流量饱和状态。使得几个机构不能同时动作,影响工程机械正常工作。这是传统负载敏感系统的明显缺点[7]。
3.2 阀后压力补偿系统
阀后压力补偿负载敏感系统,既LUDV 系统,LUDV 表示与负载压力无关的流量分配。阀后补偿控制系统如图4。
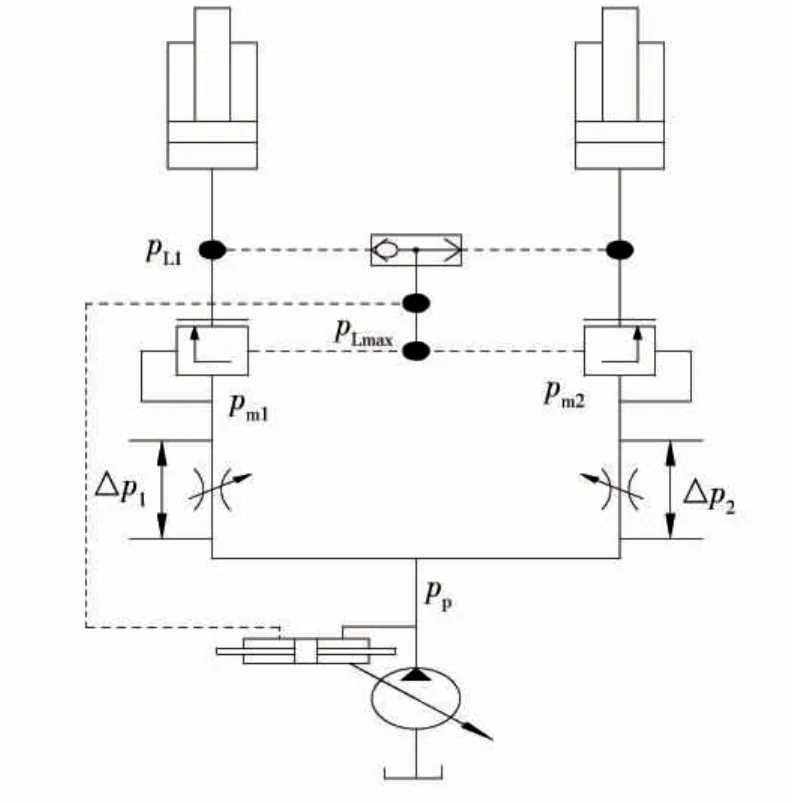
图4 阀后补偿控制系统
在阀后压力补偿负载敏感系统中,压力补偿阀基于比例溢流阀原理。比例溢流阀(压力补偿阀)位于主阀节流口之前,压力补偿阀弹簧腔压力和负载敏感泵的负载敏感阀引入的压力均为该系统通过梭阀比较后的最大负载压力。
当通过所有阀的流量小于变量泵所提供的流量时,即流量没饱和时,液压油经过主阀节流口的两端压差△p1和△p2为:
式中:pp为泵口压力,Pa;pm1、pm2为节流阀后压力,Pa。
在压力补偿阀的作用下,pm1=pm2,此时△p1=△p2,同时负载压力通过梭阀比较后,将压力传导至变量泵负载敏感阀,变量泵负载敏感阀设定压力△p=pp-pLmax,所以△p1=△p2=△p,所以,主阀节流口两端压差等于变量泵的负载敏感阀的设定压力。因此通过主阀的流量只取决于阀的开口度,和系统的负载无关。这时泵的负载敏感阀设定的△p 压力会直接影响进入液压缸的流量大小[8]。
当通过所有阀的流量大于变量泵所提供的流量时,即流量饱和时,泵的压力控制器失效,泵此时只受功率控制器调节,高负载侧的压力通过梭阀比较后,将压力同时传到低负载和高负载侧补偿阀的控制腔,补偿阀全开,节流阀后的压力也等于最高负载压力[9]。随着不饱和度的增加,泵的出口压力pp逐渐减小,△p1和△p2也随之减小,但是流阀后压力pm1、pm2等于最高负载压力,所以△p1一直等于△p2,并且大小取决于系统的最大负载。所以,通过的流量分配阀进入液压缸的流量仍然取决于节流阀的开口度,按照阀的开口度将流量分配到液压缸,保证执行元件的相对运行速度不发生改变[10-11]。
4 结语
1)负流量控制可使液压泵的输出流量按照操作者操作的换向阀主阀芯开度决定,做到按需提供,从而减少能源损耗。但是,负流量控制的不足之处在于,负流量控制系统液压泵的排量控制永远滞后于换向阀的动作。
2)正流量控制液压系统没有中位的空流损失,回油压力更小,所以与负流量控制回路相比,正流量控制回路具有更好的操作敏感性和节能效果,但由于正流量控制系统中多个梭阀的存在,导致正流量控制回路相比于负流量控制回路结构复杂,成本较高。
3)负载敏感系统中负载敏感泵的流量特性与负载无关,流量的供给取决于操作手柄的开口度,节能效果最明显,而且操作的舒适性最好。
