用于微型胃肠道胶囊机器人供能的U型发射线圈无线能量传输系统设计与实验
2021-10-04孟一村颜国正陈范吉
孟一村,颜国正*,汪 炜,陈范吉
(1.上海交通大学 电子信息与电气工程学院,上海 200240;2.上海交通大学 医疗机器人研究院,上海 200240)
1 引 言
近年来,随着社会的进步,人们的生活节奏加快,饮食结构也随之变化,致使胃肠道疾病也日趋上升。在过去的十年中,胶囊医疗设备,如胶囊内窥镜,在消化系统疾病的诊断中得到了一定的应用[1]。随着该技术的发展,胶囊设备将给消化系统疾病的诊断带来革命性的变化。在未来,胶囊内窥镜将不仅仅承担图像检测的功能,还可以进行活检取样,药物释放,热疗[2]等。因此,相应的功耗会逐渐增加。传统能量传输方式主要有电池供能和拖缆供能。受胶囊内窥镜尺寸的限制,锂电池可能无法提供足够的能量。而拖缆供能不能够让机器人在肠道内自由运动,另外拖缆可能会对肠道造成损伤。因此,无线能量传输方式越来越被看好成为植入式生物医学设备的能量解决方案[3-6]。
然而,无线供能的胶囊机器人仍存在很多严重的问题。就通常的设计来说,病人需躺在床上,进入到线圈内部从而发射线圈才能给机器人进行供能。由于胃肠道的面积较大,覆盖整个胃肠道磁场所需的线圈直径大概需要700 mm[7]。不同于简单胶囊内窥镜的能量需求,机器人还需要驱动机构运动,所以需要的能量更多。为满足机器人正常工作的能量需求,要求无线能量传输系统必须在一个较大的范围内提供均匀、稳定、强度足够的磁场。当机器人需要的功率超过无线能量传输系统所能提供的功率极限时,机器人内部的部件将不能正常工作。例如,LED灯会变暗甚至闪烁,电机的转矩会降低,电路板上的电压会降低,与上位机的通信可能会中断。系统的整体稳定性受到影响,进而会导致整个系统工作不可靠。同时,人体处于较强磁场的环境中,人体的生物安全性也需要考虑[8]。因此,提高能量接收效率和能量接收的稳定性是无线能量传输系统应用在胶囊机器人领域的关键挑战。
然而目前所研究的无线能量发射系统在应用于胶囊机器人时均存在很多局限性。在2011年,贾志伟[9]提出了可用于胃肠道胶囊机器人的正方体接收线圈的无线能量传输系统,其发射线圈直径仅为400 mm,只可对于体型较小患者使用。在2015年,高晋阳[10]提出了可用于胃肠道胶囊机器人的三维圆柱体接收线圈,进一步缩小了接收线圈的尺寸,但其没有对系统的效率进行分析,并且接收功率的稳定性较低。在2016年,柯全[7]把发射线圈的直径提高到了69 cm,发射线圈可以用于绝大多数患者,但传输效率较低。
本文设计了一种用于微型肠道胶囊机器人功能的U型发射线圈无线能量传输系统,通过数学计算和仿真分析,建立U型发射线圈无线能量发射系统磁场模型。并搭建U型发射线圈无线能量发射系统原理机,将实验结果与仿真结果进行分析。通过结构的改变,使得可以在发射线圈的内部加入磁芯,显著提高线圈内部的能量接收效率和接收功率。
2 系统整体设计
2.1 系统介绍与原理
为了克服上述介绍中无线能量传输存在的所需尺寸大、传输效率低、供能不足等缺陷,本文设计在发射线圈中带有磁芯的无线能量传输系统以提高传输效率和接收功率,同时缩减整体线圈的尺寸大小。如图1所示,其主要包括体外能量发射系统,体内能量接收系统和机器人负载三部分。提出的系统中,无线能量传输的发射线圈缠绕在U型磁芯两端上,在实际应用中可以通过C型臂悬挂在检测床上方。检测床的上部分为滑动式,可以左右移动来调节被测患者的身体位置,使机器人可以保持工作在磁场最强的区域。同时C型臂和房间的地板装有滑轨,可以前后移动,方便被测患者进入设备。另外,C型臂悬挂的U型线圈可以上下调节,使系统对不同体型的被测患者都可以调节到最大磁场强度,提高效率。通过这些装置,发射线圈可以在三个正交方向上平动,使整个系统拥有三个自由度。位置传感器可以检测机器人在患者体内的位置,控制系统使机器人保持在线圈中磁场最强的位置。给上下平行的两个线圈通交流电,从而使系统产生频率可调的交流磁场。胶囊机器人装有效率优化的三维接收线圈,接收线圈提供机器人正常工作所需能量。对于微型胃肠道胶囊机器人而言,常规的螺线管对发射线圈直径多在400 mm以上,制作同样大小的磁芯难度很高,并且磁芯的涡流损耗和磁滞损耗会很大。此外,通常无线能量系统工作时患者需要进入发射线圈内部,类似于核磁共振,而加入磁芯后患者无法进入。因此,通常的发射线圈结构不易增加磁芯。所设计的U型发射线圈,采用C型臂悬挂在患者腹部上方,患者不需要进入线圈内部,方便增加磁芯。

图1 U型发射线圈无线能量传输系统结构框图Fig.1 Structure diagram of U-shaped transmitting coil WPT system
感应耦合能量传输多用串联或并联的电感电容构成谐振器。根据耦合的程度,现有的无线能量传输原理可以分为两组:强耦合能量传输[11-12]和弱耦合能量传输[13]。强耦合能量传输一般采用四线圈的拓扑结构,或更多线圈来作为中继线圈[14]。通常线圈间的距离很小,耦合程度强。而弱耦合能量传输通常运用两个线圈作为谐振器,一个是发射线圈,一个是接收线圈。弱耦合的传输距离更远,线圈间的耦合程度也相应较弱。与经皮能量传输等传输距离近、位置固定的无线传输方式相比,对于胃肠道胶囊机器人的无线供能而言,机器人需要在肠道内自主运动,其运动的位置与磁场的角度都是随机的。同时机器人携带的接收线圈与发射线圈距离较远。因此对于胃肠道胶囊机器人来说,无线能量传输方式多为弱耦合无线能量传输。
2.2 无线能量传输系统等效电路模型及参数计算
本文所提出的式无线供能系统等效电路模型是充分考虑了胶囊机器人所需的能量效率、区域内磁场强度均匀性以及接收线圈尺寸限制后的结果。对于发射端而言,产生的磁场应该足够均匀并且强度足够。而对于接收端而言,受限于机器人的尺寸,接收线圈的回路比发射线圈的要小得多且有相同的频率。机器人的能量耦合方式为弱耦合。为分析接收线圈为机器人负载提供的功率大小,建立无线能量传输系统的等效电路模型如图2。
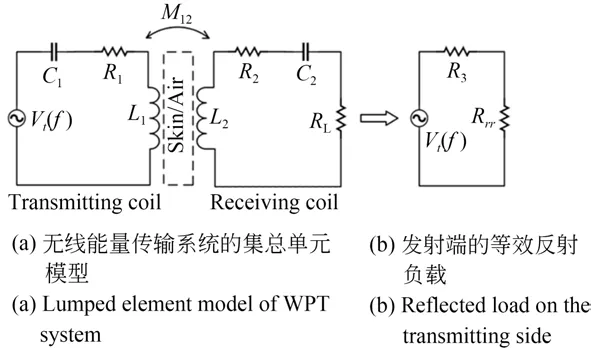
图2 U型发射线圈的WPT系统等效电路Fig.2 Equivalent circuit of the WPT system with Ushaped transmitting coils
其中L1和L2表示发射线圈和接收线圈,两侧回路分别串接补偿电容C1和C2,同时谐振于fo。基于反射负载理论,谐振状态下的接收端对于另一侧的影响可以通过计算接收端的反射阻抗Rrr建模分析:

其 中:k12=M12/L1L2,Q1=ωL1/R1。Q2L=Q2QL/(Q2+QL)=ωL2/(R2+RL),式 中Q2=ωL2/R2,QL=ωL2/RL。Q2和QL一般是指接收回路品质因数和接收回路有载品质因数。因此,谐振发射回路可以等效为图2(b)所示电路,Rrr与发射回路等效电阻串联。在图2(b)中,R3代表的是整个发射回路的电阻。为了推导出能量传输效率在谐振时的方程,根据反射电阻理论,电源提供的能量被给到了R1和Rrr上。之后能量传递给Rrr,然后接收环路接收到的能量分为了R2和RL上的能量。因此,可以用RL消耗的能量除以总能量表示WPT系统的能量传输效率。由此引出:
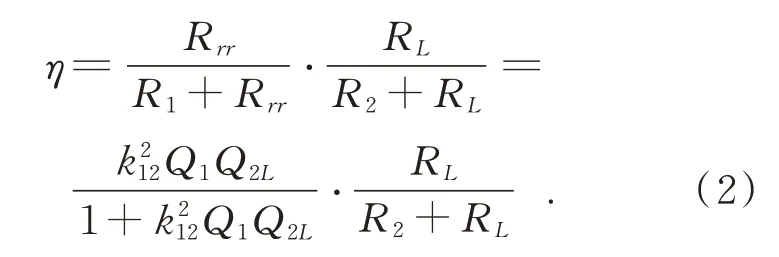
这与文献[15]中的结果一致,需要注意的是,式(2)中的第一项和第二项分别表示传递给反射电阻的功率和负载中的效率。设发射线圈的驱动电流为Id,则向系统负载的能量传递公式为:
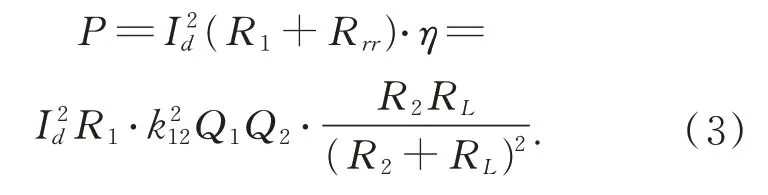
在无线能量传输系统中,当接收回路阻抗匹配时,发射功率达到最大值。同时,也确定了系统的操作频率由式(2)可知,能量传递效率与品质因数有关,而品质因数由系统频率决定。之前Gao[16]的 研究显示,最佳频率设置在218 kHz可以获得更高的能量传输效率。考虑到我们的工作和之前的研究有相似的几何参数,我们应用了相同的频率。
3 U型发射线圈无线能量系统仿真分析
根据上述能量传输理论,通过ANSYS Max‐well仿真软件对所设计的能量发射系统的进行磁场环境模拟仿真,具体仿真参数见表1。有限元仿真中采用薄壁圆筒来近似拟合单层密绕的线圈模型,简化整体仿真的计算量,同时对于仿真结果影响较小。外部空间介质设置为空气,与实际实验中接收线圈环境一致。在Maxwell仿真中,激励设置选取安匝数作为激励单位,即电流与线圈匝数的乘积。单个线圈匝数为40匝,电流为1.5 A,激励为60安匝。仿真模型的边界为长580 mm,宽260 mm,高450 mm的长方体。模型采用218 kHz交流磁场。
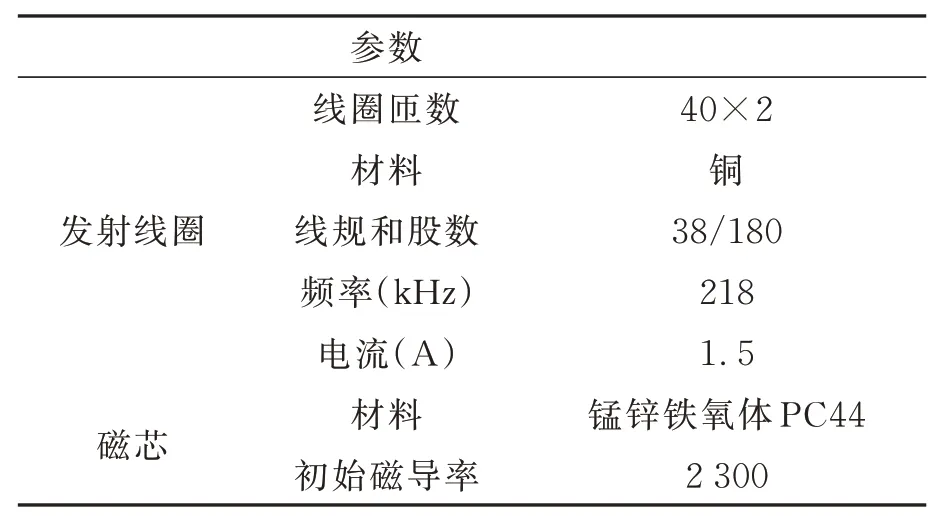
表1 U型发射线圈仿真参数Tab.1 Simulation parameters of U-shaped transmitting coil
图3(a)是仿真模型的示意图,图中表示了坐标系的原点以及x,y,z轴所代表的方向。YZ截面的磁场磁通密度的仿真结果如图3(b)所示,XZ截面的磁场强度大小的仿真结果如图3(c)所示。其中蓝色表示低磁通密度,而红色表示高磁通密度。图3中的黑色方框为胶囊机器人工作区域,其范围是Y方向30 cm,X方向15 cm,Z方向3 cm~12 cm的长方体区域。从图3可知,U型线圈上方的胶囊机器人工作区域磁场磁通密度颜色变化较小,磁场强度较为均匀。

图3 U型发射线圈产生的磁通密度Fig.3 Magnetic flux density generated by a U-shaped transmitting coil
为了定量分析U型线圈产生的磁通密度的强弱,在xOy平面以原点为中心,分别在X方向和Y方向偏移50 mm取点,在水平面共取9个点,用坐标表示分别为:(0,0)(0,5)(0,-5)(-5,-5)(-5,0)(-5,5)(5,-5)(5,0)(5,5)。间距为5 cm选取9个点分别绘制各点从线圈上方3 cm到12 cm的磁通密度,仿真结果如图4所示。在工作区域内磁通密度基本处于3 Gs到5 Gs范围内,根据文献[17]中所研究的机器人正常工作所需磁场强度为3 Gs左右,因此该无线能量发射系统产生的磁场强度能够满足胶囊机器人正常工作。

图4 z轴距离变化对磁通密度的影响关系Fig.4 Influence of z-axis distance variation on magnetic flux density
在工作区域内磁通密度基本处于3 Gs到5 Gs范围内,根据文献[17]中所研究的机器人正常工作所需磁场强度为3 Gs左右,因此该无线能量发射系统产生的磁场强度能够满足胶囊机器人正常工作。在同一高度下各点磁通密度大小差别不大,最大为高度为30 mm时,最大磁通密度与最小磁通密度差距为23.55%,最小时为高度120 mm时,约为6.85%。
4 实验验证与结果分析
4.1 U型线圈传输功率及效率测试
根据理论分析和仿真结果,实验搭建了U型线圈式无线能量发射系统,测试其能量接收功率与效率,并与仿真结果进行对比分析。
U型发射线圈的尺寸参数的选取与磁芯尺寸、人体生物安全性相关。对于磁芯尺寸而言,发射线圈需要缠绕在磁芯外部,而磁芯尺寸过大对烧结工艺要求较高,并且磁芯磁导率降低,涡流损耗和磁滞损耗较大,反而影响系统性能。此外,虽然线圈尺寸增大时,产生的磁场强度更强,均匀性也更好。但根据贾智伟对线圈优化的研究[18],当线圈尺寸增大时,线圈所需的激励电流也随之增大,对驱动电路要求过高。同时,线圈电流增加也会影响人体的生物安全性。因此,无线能量传输系统的U形发射线圈采用利兹线密绕在磁芯上,尺寸大小是80×80 mm,两组线圈均为40匝。两组线圈通过底部的80×80×300 mm的磁芯相连,具体方式如图5(b)所示。整体U型磁芯的长为380 mm,宽为80 mm,高为280 mm。根据人体的平均厚度[19],确定线圈中间的距离为300 mm。为提高传输效率和安全性,两组发射线圈采取串联连接的结构。发射线圈的电感、阻值以及品质因数均由阻抗分析仪KEYSIGHT E4990A测得,线圈阻值为9.78Ω,品质因数为337.65。对于线圈的驱动部分,根据实验室先前的研究,系统的工作频率设定为218 kHz。选择功率场效应管(IRFB4115)来实现线圈驱动电路的高功率输出。IRFB4115的内阻只有9.3 mΩ,IRFB4115具有低通阻和低功率损耗的特性。在保证50%安全裕度的条件下,发射电路的最大驱动电流Id限定在8.16 A以内。

图5 测量能量传输效率和接收功率的实验装置Fig.5 Experimental prototype for measurement of PTE and received power
U型发射线圈无线能量传输系统由U型发射线圈部分和机器人内部的接收线圈部分组成。发射线圈由驱动电路供电,产生交变磁场。接收线圈感应到交变磁场,产生交流电流。通过机器人内的电源管理电路,将交流电转化为直流电,为机器人系统供电。
整个实验装置如图5所示,它包括了U型无线能量发射线圈,发射线圈驱动部分,接收原型机和测量仪器。整个接收原型机由接收线圈,能量管理电路,负载电阻组成。根据文章[20],机器人的内阻约为30Ω,因此实验中采用在能量管理电路的后端接入一个30Ω的负载电阻来替代机器人组成接收原型机。如图5中的(a),无线能量发射部分相关的驱动装置集成在了发射控制柜中,图5(c)中展示了系统的发射电路模块构成,包括信号产生电路,信号放大驱动电路,全桥逆变电路。由信号产生电路中的UCC3895产生驱动信号经光耦芯片TLP2630进行隔离后输出到信号放大驱动电路的驱动芯片IR2110,之后通过IR2110驱动全桥逆变电路中的四个MOSFET工作。为使输出的交流电频率与电路的谐振频率相同,调节UCC3895芯片中的RT引脚电阻从而调节产生的驱动信号频率。同时采用LC串联谐振电路,并加入可调电感或电容进行阻抗匹配从而得到最大的线圈电流。可调电容的调节范围是0~500 pF,串联接入到整个电路中,一端与发射线圈相连,另一端与驱动电路的输出相连。整个无线能量系统的输出电压范围是0 V~50 V,通过调节可调电容,观察输出电流,当电流最大时,整个系统在218 kHz频率下谐振。在接收端部分,通过整流桥和稳压模块,可以稳定的给机器人提供3.3 V电压。
接收线圈的直径为12.8 mm,采用0.12 mm的漆包线绕制在锰锌铁氧体上,为减小涡流效应,线圈为两层每层50匝密绕的结构,用阻抗分析仪测量线圈参数如表2。
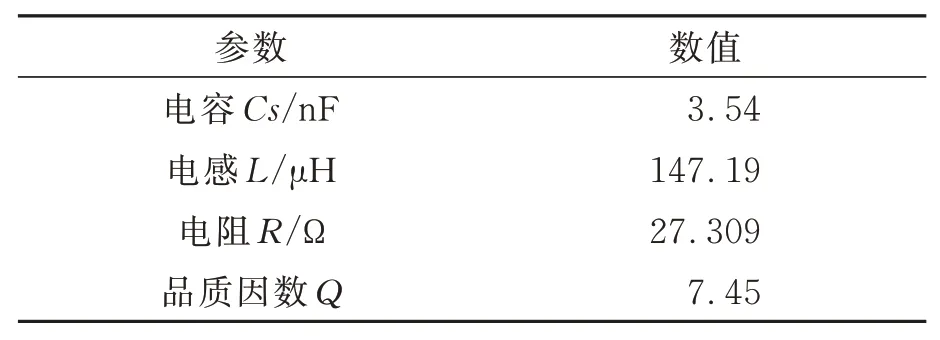
表2 接收线圈参数Tab.2 Parameters of receiving coil
将测试用的接收线圈放于U型线圈中心上方30 mm处位置,通过调节可调电容,使测量时的能量传输在218 kHz频率下处于谐振状态。通过能量管理电路板上的整流桥,将感应到的交流电流转变为直流电流。用万用表测量负载上的电压。之后调节机械升降台保持接收线圈水平位置不变,竖直方向上从30 mm升高到120 mm,其中每间隔10 mm测量一次负载上的电压大小并记录。与仿真分析类似,设U型线圈中心为原点,分别在X方向和Y方向偏移50 mm取点,在水平面共取9个点,与仿真分析中的坐标表示一致。保持其他参数不变,重复上述测量过程并记录线圈在各点时负载上电压的大小。机器人工作过程中所需能量如表3所示,总共需要能量约为500 mW。考虑到人体的电磁安全性和机器人实际工作所需能量的问题,设定在218 kHz谐振情况下,无线能量发射系统的输出电流为1.2 A到1.5 A,输出电压为25 V,此时基本满足机器人的能量需求。
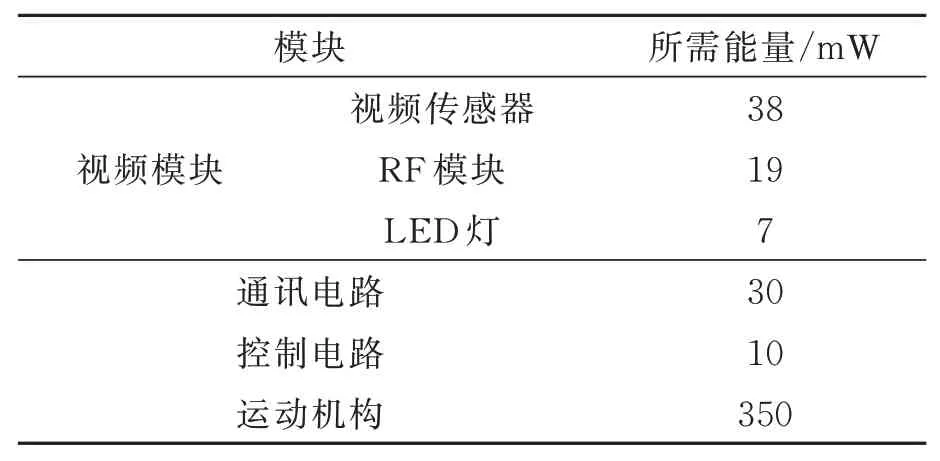
表3 胶囊机器人各模块的功率要求Tab.3 Power requirement of the modules of the capsule robot
4.2 实验结果与分析
U型线圈无线能量发射系统的性能主要由系统的整体效率和能量接收稳定性来评价。通过测量负载电阻RL上的电压VL,来计算接收到的功率。在上一章也已提及,负载电阻的阻值设置为30Ω,来模拟真实机器人工作情况下的等效电阻大小。无线能量系统的频率调谐至218 kHz以获得最大效率。系统的接收功率PR和传输效率η计算如下:

其中,Pin是发射功率,由系统的输出电压和输出电流计算得到。系统输出电压Uin和输出电流Iin显示在直流电源上。
根据式(4)和式(5),将测量每个点得到的电压代入公式算出每个点的接收功率和传输效率。接收功率的分布图如图6所示,其表示了在发射电压25 V,接收负载阻值30Ω情况下,各测量点在线圈上方30~120 mm处功率变化的情况。
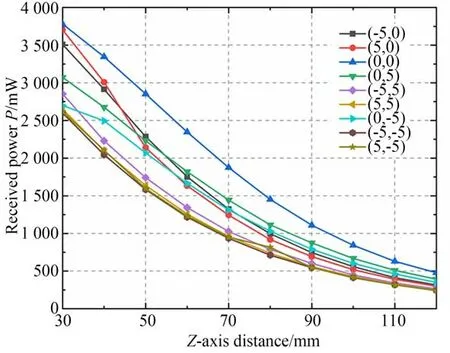
图6 U型发射线圈无线能量传输系统的接收功率Fig.6 Measured received power of U-shaped transmit‐ting coil WPT system
实验测得的功率接收结果与图4中的仿真得出的磁场磁通密度大小变化趋势一致。实际情况中在同一高度的水平面上,接收线圈处于U型发射线圈最中间位置(0,0)时接收到的功率最大,在(5,-5)和(-5,-5)位置时接收到的功率最小。当线圈距离磁芯高度为30 mm时,线圈在各点接收到的最大功率均大于2 500 mW,远远高于机器人工作所需功率,机器人在低高度下可以正常工作。随着高度增加,接收线圈接收到的功率逐渐降低,在120 mm高度下,接收功率最低仅为241.2 mW。根据机器人正常工作所需能量为500 mW,在高度为90 mm时,在各测量点的接收能量均大于500 mW,在100 mm时,机器人接收到的能量基本可以满足功率需求。
进一步考虑发射线圈的接收效率问题,将线圈在各点处的接收效率绘制如下图7。随着距离U型线圈距离的增加,线圈的接收效率逐渐降低,其变化趋势与接收功率的变化趋势类似。接收线圈在(0,0)点距离线圈30 mm处接收效率最高为14.13%,而系统在120 mm内的平均效率值也达到了4.16%。而结构中在发射线圈的内部加入磁芯,也进一步地提高了系统的传输效率。

图7 U型发射线圈无线能量传输系统的传输效率Fig.7 Measured PTE of U-shaped transmitting coil WPT system
对于U型发射线圈无线能量传输系统在不加入磁芯的情况下,两个相聚30 cm并排摆放的发射线圈无法构成磁回路,而是变成线圈独立的磁回路,无法在水平面产生磁场,实验测得的数据十分微弱,接收电压仅为mV级,线圈接收到的功率约为0。
将U型发射线圈无线能量传输系统与其他无线能量传输系统进行比较,比较结果见图表4,这些参数是各系统根据自身实际情况选择的最优参数。在各自的实际最优情况下对系统进行了比较。为了公平比较,对每种方法,均选取接收线圈在发射系统中心点处测量的接收功率和传输效率。对于频率而言,Khan[21]在文章中提到更高的频率会增加人体组织的吸收,这会对人体造成损伤。因此,本文选用的218 kHz频率相比文献[21-22]更加安全。对于功率而言,本文的接收功率与其它方式相比有很大提高,即使是系统整体的平均功率也达到了1 337.24 mW,与其他文献相比胶囊机器人的供能更加稳定,而充足的能量供给也为之后机器人搭载如活检、药物释放等模块提供了可能。与其他形式的无线能量传输系统相比,由于本文采取了U型发射线圈的形式,并在发射线圈内加入了磁芯,这样的传输方式显著的提高了能量接收功率和系统传输效率。

表4 与其他无线能量传输系统的性能比较Tab.4 Performance comparison with other WPT systems
5 结 论
在本研究中,我们针对微型胃肠道胶囊机器人无线供能传输效率和接收功率低的问题,提出了一种新型的U型发射线圈无线能量传输系统。由于U型发射线圈的结构优势,在发射线圈中加入了磁芯,进一步提高了所提出的无线能量系统的性能。提出了无线能量传输系统效率模型并对实际系统进行了磁场有限元分析,对实际情况下的磁场强度分布进行了预测。实验搭建了U型发射线圈无线能量传输系统平台并测试其性能,加入磁芯后的系统最大传输效率达到14.13%,同时接收功率为3 780.75 mW,系统平均传输效率为4.16%,平均接收功率为1 337.24 mW。理论分析和实验结果表明了所提出的系统,非常显著地提高了系统的传输效率和功率稳定性。在进一步的应用研究中,将对机器人加入定位传感器装置,配合C型臂可以控制无线能量发射装置随机器人运动,从而实现定点高效的能量传输。