圆形水池造波机系统设计及聚焦波研究
2021-09-30陈俊王磊林俊徐奕蒙王天奕郭泽斌林柏涵
陈俊 王磊 林俊 徐奕蒙 王天奕 郭泽斌 林柏涵
摘 要:该文介绍了国内首个圆形水池造波机平台,该平台为笔者所在研究院自主研发产品,目前在国内拥有技术领先性和唯一性。该造波机平台整体结构为圆形,采用推板式造波方式,控制系统采用基于EtherCAT总线的多轴运动控制系统。该水池除了能模拟常规波浪外,还能在圆形水池内模拟出强非线性波与类似字符的波面,生成各种不同全向波浪,相较于传统的矩形波浪水池,其对方向波浪具有优越的适应性,特别是生成三维全向孤立波、聚焦波方面能力突出。鉴于此,该文给出了基于聚焦波理论的初步研究结果,其成果证明了圆形水池造波机模拟极端海况的能力,可开展深远海海洋技术装备的可靠性与生存性试验。
关键词:圆形水池 造波机 EtherCAT 聚焦波 极端波浪
中图分类号:TP273 文献标识码:A文章编号:1672-3791(2021)06(c)-0043-05
Design of Wave Maker System in Circular Tank and Research on Focused Wave
CHEN Jun WANG Lei LIN Jun XU Yimeng WANG Tianyi GUO Zebin LIN Baihan
(Pearl River Water Resources Research Institute, Pearl River Water Resources Commission of Water Resources, Guangzhou, Guangdong Province, 510611 China)
Abstract: This paper introduces the first circular pool wave maker platform in China. The platform is a product independently developed by the author's Research Institute. At present, it has technology leadership and uniqueness in China. The overall structure of the wave maker platform is circular, the push plate wave making mode is adopted, and the control system adopts the multi axis motion control system based on EtherCAT bus. In addition to simulating conventional waves, the tank can also simulate strong nonlinear waves and wave surfaces with similar characters in a circular tank to generate various omni-directional waves. Compared with the traditional rectangular wave tank, it has superior adaptability to directional waves, especially its ability to generate three-dimensional omni-directional solitary waves and focused waves. In view of this, this paper presents the preliminary research results based on the focused wave theory, which proves the ability of the circular pool wave maker to simulate extreme sea conditions and can carry out the reliability and survivability test of far-reaching marine technical equipment.
Key Words: Circular tank; Wave maker; EtherCAT; Focused wave; Extreme wave;
針对当前我国建设海洋强国的战略需要,应加快推动海洋科技创新。深海蕴藏着丰富的资源,是人类未来发展的蓝色空间,也是国家长远发展的战略新疆域。海洋深水工程技术与设备研发创新需要极端工况波浪水池做技术支撑平台。目前我国已有水池类型众多,包括海洋工程水池、船舶拖曳水池、波流动床浑水港池等,可以模拟大多数应用场景下的海洋环境[1]。然而,面对深海复杂的风浪流海洋环境条件,我国现有水池还无法模拟相应海洋极端工况,因而无法完成海洋技术装备在极端海洋环境下的可靠性验证试验。而圆形波浪水池可与现有的各类水池形成良好的互补性,模拟海洋能源装备、水下机器人、海洋平台等在极端海况下的性能测试,极大缩短了海试周期,加快技术装备的开发;能够有效提升我国的海洋装备试验能力,优化提升海洋技术装备在极端海洋环境条件下的生存能力。因此,为了加强深海波浪研究,建造一套深海波浪模拟平台已迫在眉睫。
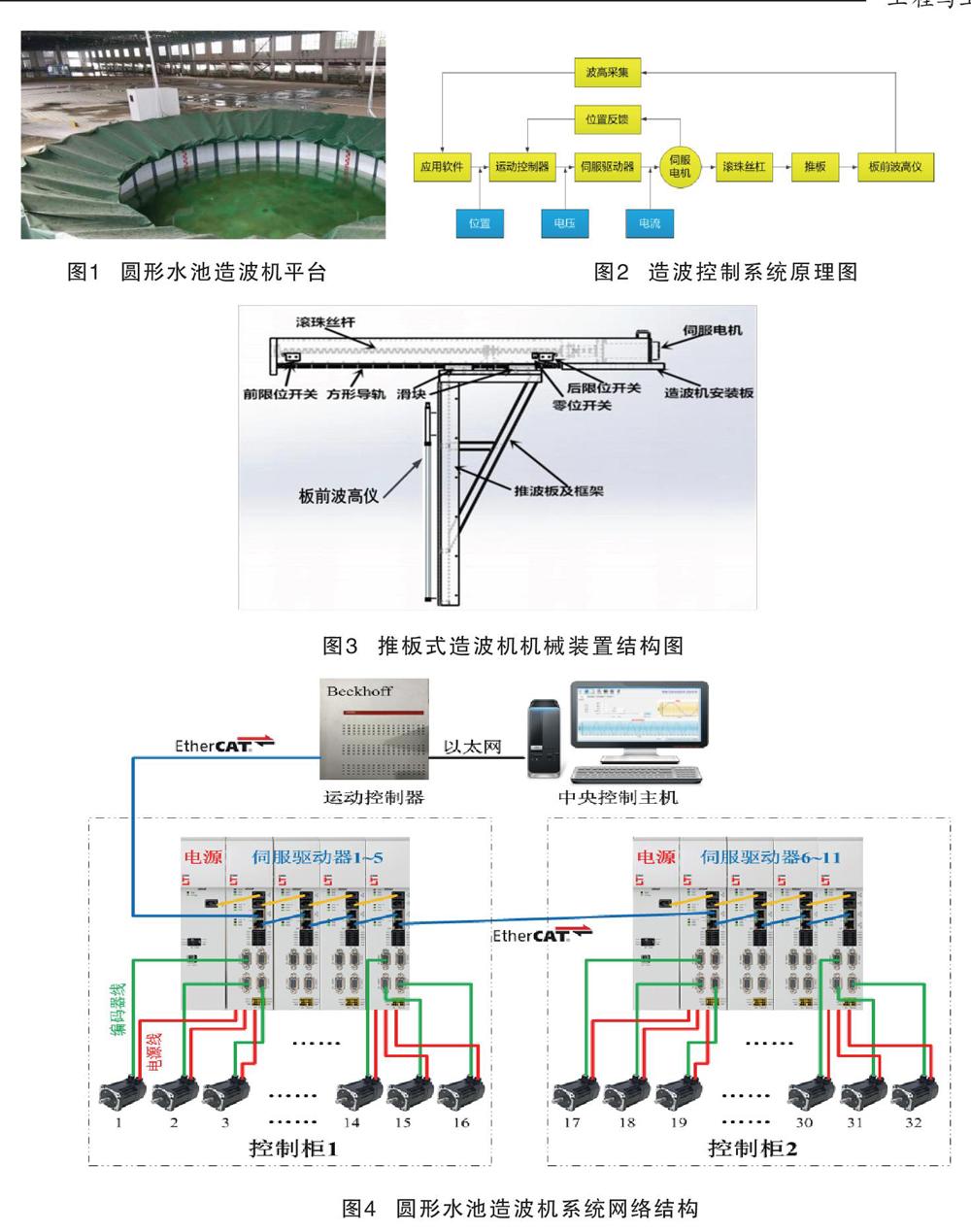
1 圆形水池造波机平台
区别于浅海波浪,在深海区波浪是全向作用于研究对象的。因此深海波浪模拟需采用圆形波浪水池,波浪模拟装置也需360度布置。目前,圆形波浪水池全球仅在英国爱丁堡大学和日本国家海事研究所有建设,在国内拥有技术领先性和唯一性。因此,笔者所在院在佛山里水试验基地建设了一座小比尺的圆形波浪水池(如图1所示),用于在深远海区域(如南海)的波浪模拟技术的前期研究,可利用圆形波浪水池和全向波浪合成技术模拟几乎所有极端波浪条件,进而可以极大缩短海洋技术装备研发周期,实现快速原型设计与优化,有利于以更快速、更经济、更低风险的方式实现海洋技术装备的高效开发与可靠利用;有利于把科研转换成先进生产力,实现创新驱动发展,进一步提升该院在波浪测控领域的品牌效应,奠定该院在造波机领域的国内领先地位。
考虑到科学性、先进性和实用性,建造的圆形水池造波机平台直径6 m,有效直径4.6 m,最大工作水深0.3 m,造波单元数量为32,造波板单板宽度为0.5 m(包含缝隙),每个造波单元加装板前波浪监测传感器,满足全向主动吸收式造波平台的硬件要求。
2 造波控制系统设计
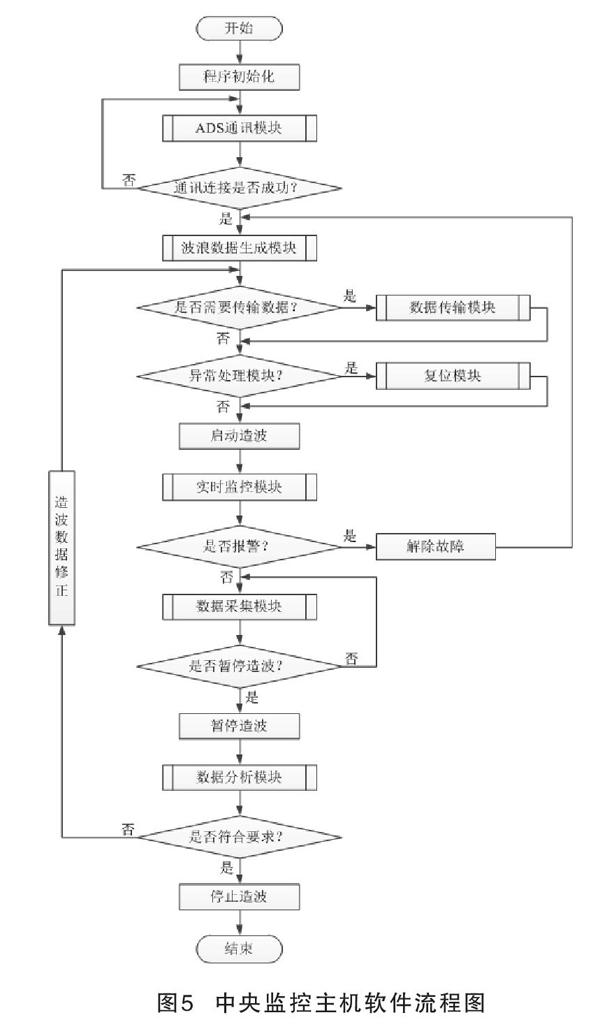
圆形水池造波机控制系统架构图见图2。
圆形水池造波机控制系统主要包括以下7个部分:
(1)应用软件。用于计算产生期望的推板运动过程。
(2)运动控制器。用于接收应用软件传来的目标位置,将其转换为电压信号传给电机的伺服驱动器[2]。
(3)伺服驱动器。用于接收来自运动控制器的电压信号,并将其转换为驱动电机需要的电流。
(4)伺服电机。在伺服驱动器控制下提供足够的扭矩使造波推板运动期望的距离。
(5)滚珠丝杠+推板。滚珠丝杠将电机旋转运动转为直线运动,进而使推板在电机作用下完成造波运动过程。
(6)反馈设备。对于伺服电机反馈设备通常是个积分编码器,用来感应电机的位置并通知运动控制器,形成一个闭环的运动控制系统[2]。
(7)板前波高采集系统。满足无反射造波需要。
3 推板式造波装置设计
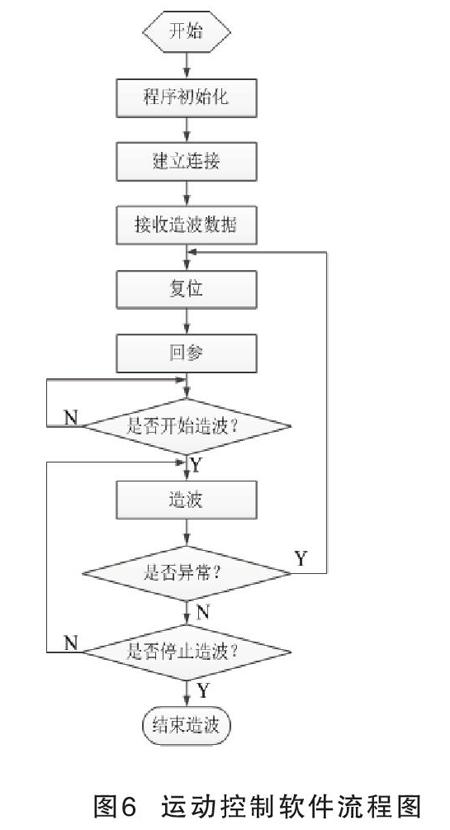
单个推板式造波单元机械装置结构图见图3。
由造波机框架、前限位开关、滚珠丝杠、方形导轨、滑块、推波板及框架、零位开关、后限位开關、造波机安装板、伺服电机、板前波高仪等组成。限位开关又称为位置开关,被用来限制推板的位置或行程,使推板按一定位置或行程自动停止;每个造波单元都安装有零位开关,具有零位检测与控制功能,通过下位机可以实现对推板位置的精确定位。推板式造波机模拟波浪的原理是电机的驱动器接收运动控制器发出的控制信号,驱动电机旋转,滚珠丝杠将电机旋转运动转为直线运动,从而带动推波板做有规律的前后往复运行,即造波运动。
4 网络通信单元设计
在伺服运动控制领域,运用较多的网络通信结构有CAN总线、SynqNet总线和EtherCAT总线。通过比较3种总线的特点,此次圆形水池造波机系统采用EtherCAT总线性结构。EtherCAT是由德国Beckhoff公司于2003年提出的实时工业以太网技术。EtherCAT工业以太网以其高速的通信速率、高度的实时性能、灵活的拓扑机制、精确的同步性能等多项技术优势,在工业领域内得到了广泛的应用。EtherCAT的主要特点是高效率、刷新周期短、同步性能好、兼容性强[3]。
按照此方案设计了圆形水池造波机系统网络结构,见图4所示。中央监控主机与运动控制器之间通过以太网相连,运动控制器下辖11台伺服驱动器,每台驱动器可带3台伺服电机,共32台伺服电机,运动控制器与11台伺服驱动器之间通过EtherCAT网络相连,每16台驱动器安装在一个控制柜内,共2个控制柜。
5 造波系统应用软件设计
系统软件分为两个部分:中央监控主机软件和运动控制软件。中央监控主机软件是基于Windows 7 64位系统,采用VC++2010高级语言开发平台;运动控制软件是基于Windows 7 32位系统,采用TwinCAT开发平台;二者之间的通信是通过ADS进行数据交换。
5.1 中央监控主机软件
中央监控主机软件采用VC++2010高级语言开发平台,采用模块化的设计方法对中央监控主机软件进行设计。该软件包括波列数据生成模块、ADS通信模块、远程控制模块、异常处理模块、数据传输模块、图形化显示模块、数据采集及仪器率定模块和数据分析模块等。中央监控主机软件流程图见图5。
中央监控主机软件具体设计思路如下:
程序初始化完成后,便进入ADS通讯模块,通过特定的NetID+Port建立与运动控制软件之间的连接,并实时检测TwinCAT状态,如果检测到其状态为ADSSTATE_RUN,说明TwinCAT程序正常运行;然后进入波浪数据生成模块,生成所需要的波列数据,这些数据本质上是所有推波板的位置坐标;造波数据生成后,进入数据传输模块,通过以太网将数据发送到运动控制器;在开始造波前,系统通过异常处理模块,检测各造波机是否处于IDLE(正常)状态,如果存在不正常状态,可通过复位功能,使所有造波机都处于IDLE状态;数据传输完成,便可控制运动控制器进行造波试验。在整个造波过程中,运动控制器实时发送造波机状态给中央监控主机软件,一旦发生异常情况,立即停止造波,中央监控主机根据具体的异常情况进行处理,待故障解除后方可进行后续试验。
5.2 运动控制软件
运动控制软件具体设计思路如下:
程序初始化完成后,等待中央监控软件的连接;当网络连接建立完成后,进入造波数据接收模块,开始接收数据。造波模块将接收到的数据发送到对应的驱动器,进而控制电机运动。在整个过程中,造波机的复位、回参、装载凸轮表、开始造波、停止造波等指令都是通过中央监控软件来控制。运动控制软件流程见图6。
6 聚焦波模拟研究
圆形水池造波机一个最主要的功能就是模拟深海极端波浪。极端波浪包括“典型”极端波浪和“畸形”极端波浪两种。“典型”极端波浪基于微幅波理论,将复杂的波浪变化用一种单一频率的波动来代表,水面上任意一点都将随时间做简谐形式的振荡,一般可以用余弦曲线或者正弦曲线来表示这一波动;“畸形”极端波浪基于线性叠加理论,将海浪看作是由大量的具有不同波高、不同周期和不同初相位的余弦波叠加而成,通过各种方式使大量的具有合适相位和方向的余弦波叠加可以产生极端大波[4]。
而聚焦波是产生“畸形”极端波浪的主要方法。生成聚焦波的基本思路为:在空间与时间的某一固定点(聚焦点)处,所有组成波均以零相位叠加,从而在该点处形成一个极高的波峰,从分析这个叠加点出发,反推得到造波板的位移曲线[5]。
空间波列时程可由波列频谱离散形式的Fourier反变换得到[6],即:
(1)
式(1)中:为生成聚焦波所用的频谱,为圆频率离散点,其中N为采样点的个数;Δω=2π/(NΔt),为采样周期,为采样时间间隔。Fourier反变换时取个频率间隔,kj为第j个组成波的波数,满足线性弥散关系;为时间离散点;为空间离散点;为聚焦点的空间与时间坐标。式中Fourier反变换包含了幅值频谱及相位分布2个重要信息。在波浪的传播过程中,幅值谱是不随位置变化的,相位分布及波列形状随空间位置变化而变化。在聚焦点处,所有组成波叠加为一个单独的波峰点。为在时历上聚焦,式中的Fourier反变换应在时间上做的平移,以使各组成波的相位在[0,π)范围内变化。这样便得到聚焦位置处的波列时程,即:
(2)
从聚焦点出发,将上式Fourier反变换转换到造波板位置处,即得到造波板前的波列时程[7]:
(3)
基于造波機的频率响应函数,即可得到生成瞬态波时推板行程的过程曲线[8]:
(4)
依据上述聚焦波理论,在矩形水池波浪模拟算法的基础上,实现一种全向波浪模拟合成算法,笔者做了大量实验,最终得到比较理想的聚焦波成果,其中最典型的两种聚焦波见图7和图8所示,其中图7是尖峰聚焦波,证明圆形水池造波机模拟极端海况的能力,图8是字母“D”波形,证明了该院聚焦波波浪算法的研发能力。
5 结语
该文介绍了国内首个圆形水池造波机平台,该平台为笔者所在研究院自主研发产品,目前在国内拥有技术领先性和唯一性。该造波机平台整体结构为圆形,采用推板式造波方式,控制系统采用基于EtherCAT总线的多轴运动控制系统。该水池除了能模拟常规波浪外,还能在圆形水池内模拟出强非线性波与类似字符的波面,生成各种不同全向波浪,相较于传统的矩形波浪水池,其对方向波浪具有优越的适应性,特别是生成三维全向孤立波、聚焦波方面能力突出。鉴于此,该文给出了基于聚焦波理论的初步研究结果,其成果证明了圆形水池造波机模拟极端海况的能力,可开展深远海海洋技术装备的可靠性与生存性试验。
参考文献
[1] 刘毅,程少科,郑堤.大功率造波机中驱动技术的研究现状与展望[J].机械工程学报,2016,52(24):
155-160.
[2] Zhao T F,Chu G,Yu Y.Feasibility of Micro Wave Tank for Ocean Engineering Experiments[J]. Advances in Marine Sciences,2015(2):7-12.
[3] 陈俊,邢方亮,王磊,等.基于EtherCAT总线的推板式造波机控制系统[J].科技资讯,2020,18(23):18-21.
[4] 杨金凤.基于三维波能聚焦的波浪破碎特性的试验研究[D].大连:大连理工大学,2020.
[5] 赵西增,童晨奕,姚炎明.极端波浪对跨海桥梁上部结构作用研究[J].华中科技大学学报:自然科学版,2020,48(12):127-131.
[6] 李宏伟,庞永杰,孙哲,等.白噪声不规则波与聚焦波的水池模拟[J].华中科技大学学报:自然科学版,2013,41(1):89-92.
[7] 王磊,李金宣,样金凤,等.三维聚焦波破碎相关特性的试验研究——单频聚焦[J].水道港口,2021,42(1):22-28.
[8] 郑泽宇.聚焦波在典型岛礁断面上传播的水动力特性研究[D].大连:大连理工大学,2019.
