便携式全方位微变监测雷达系统精度分析
2021-09-29高志奇周世峰乞耀龙谭维贤黄平平
高志奇 周世峰 刘 勇 乞耀龙 谭维贤 黄平平
(1. 内蒙古工业大学信息工程学院, 内蒙古呼和浩特 010051; 2. 内蒙古自治区雷达技术与应用重点实验室, 内蒙古呼和浩特 010051; 3. 中铁二院工程集团有限责任公司, 四川成都 610031)
1 引言
微变监测雷达由于其工作平台在地面上,可以在目标区域外几十米甚至几公里处进行观测,有利于灵活地选择布设地点和观测视角,且工作在微波波段,成像时不受天气条件的影响,具有全天时全天候的优点[1- 4]。按照合成孔径(Synthetic Aperture Radar, SAR)的使用方式,在SAR成像模式下,目前广泛应用的有两种类型,即直线扫描式地基SAR和弧线扫描式地基SAR[5-6],直线扫描地基SAR是通过合成孔径雷达技术,在方位向采用高精度直线轨道运动形成合成孔径,利用脉冲压缩实现距离向高分辨率,从而获取目标区域的高分辨率图像。具有代表性的有IBIS-FM系统[7],LiSA系统[8]、FastGBSAR-S系统[9]、RiskSAR系统[10]、S-SAR系统[11]、边坡形变监测系统[12-13]、微变监测雷达LSA系统[14]等;弧线扫描地基SAR是通过旋转云台带动收发天线进行全方位圆弧扫描,从而形成大的合成孔径,与直线扫描SAR相比,成像算法有所不同[15]。弧线扫描式地基SAR代表的有ArcSAR(Arc-scanning SAR)[16]、IBIS-ArcSAR系统[17]、Arc FMCW-SAR系统[18]和微变监测雷达RSA系统[19]、便携式全方位微变监测雷达系统等。
很多专家学者对上述地基微变监测雷达系统进行了精度验证与分析,如邢诚、徐亚明等对IBIS-S 系统设计了相应的精度检测方案,实验表明,IBIS-S 系统可以实现高精度的建筑物、桥梁等目标物的微变形监测[20];曹佰松对北京理工雷科生产的地基InSAR系统进行精度验证,实验结果表明,该系统测量精度能达到0.1 mm,空间分辨率中方位向分辨率能达到3.53 mrad,距离向分辨能达到0.23 m,可实现高精度的目标微变形监测应用[21]。周吕、郭际明等对IBIS-L系统完成了基于二维形变场的精度验证与分析,实验结果表明,该系统可以实现小区域性的亚毫米级形变探测[22]。曲世勃、王彦平等基于ASTRO系统分析了影响形变监测精度的主要误差源,验证了 ASTRO 系统用于形变监测的能力[23]。
目前形变精度验证研究多针对直线扫描款式,对弧线扫描款式相应研究还较少,本文基于内蒙古工业大学研制的便携式全方位微变监测雷达系统进行精度测试分析,同现有的IBIS-FM系统、LiSA系统、FastGBSAR-S系统、LSA系统等直线扫描微变监测雷达系统相比,该系统可以扩大观测角度范围,提高系统监测效率,且具有小型化、便携式的特点。通过设计两组形变监测实验,分别对一维形变监测精度和二维形变监测精度进行了验证与分析,通过实验,验证了便携式全方位微变监测雷达的形变监测能力。
2 微变监测雷达形变监测模型
微变监测雷达有合成孔径(SAR)和实孔径(Real Aperture Radar, RAR)两种工作模式。在实孔径工作模式下,雷达不动,仅测量天线指向方向的一维形变;在合成孔径工作模式下,雷达需要对观测区域成像,然后根据观测目标在视线(Line of Sight, LoS)向的形变,计算目标在平面内的形变[23]。两种工作模式的监测原理有所不同。
2.1 一维形变监测模型
便携式全方位微变监测雷达采用连续波体制,发射信号为步进频连续波信号,发射信号St(t)的表达式为:
(1)
fm=f0+mΔf
(2)
令场景中目标P回波信号与本振信号做混频处理后的信号Sif(m)为[24]:
(3)
式中,σP为目标的散射系数,R为点目标与雷达的距离;距离信息的获取是通过将混频处理后的信号Sif(m)进行逆傅里叶变换来实现:

(4)
式中,N表示采样的点数;n为离散采样点变量,其取值范围为n=[1,2,…,N],相位φ的表达式为:
(5)

(6)
(7)
2.2 二维形变监测模型
在实际监测环境中,监测点位置发生变化时,其可能不只在雷达视线方向发生形变,也可能在其他方向发生形变位移。因此,上节所述一维形变监测模型并不适合在复杂环境中复杂目标的监测,如变化状况复杂的滑坡或露天矿等[25]。设两次观测中,雷达到任意一点目标P的距离变化为ΔR=R1-R2,该变化与两幅图像的干涉相位成比例关系,可以通过干涉相位提取形变信息。
假设大气在两次回波中没有变化,则雷达获得的目标回波可以表示为[26]:
(8)
其中,σp为目标的散射系数,当R不同时,回波的幅度值与σp成正比,与R成反比。对目标P进行前后两次观测,观测前后的斜距分别为R1和R2,则其两次回波分别为:
(9)
(10)
将两次雷达回波进行复共轭相乘,并提取其相位即为干涉测量相位,如式(12)所示:
(11)
(12)
与其相应的雷达视线向形变即为:
(13)
3 微变监测雷达精度影响因素分析
由第2节分析可知,提取的干涉相位可直接用于计算雷达LoS向形变,但在精度测试过程中,诸多因素可能会对解算LoS向形变造成影响,进而影响测试精度。本文主要针对被测目标的布局设置和随监测距离不同信噪比的变化两种情况,分析可能对测试精度造成的影响。
3.1 观测目标布局对精度的影响
当雷达与被测目标距离较远时,两次雷达波近似平行,如图2所示。图中r为实际发生的形变,R1、R2为形变前后的斜距长度,θ角为滑坡方向位移与LoS向位移之间的映射角。由斜距近似平行假设几何关系可将LoS向位移的解算表达为式(14),LoS向位移计算与角度θ有关。

图1 微变监测雷达形变提取原理图Fig.1 Schematic diagram of Micro Deformation Monitoring radar deformation extraction

图2 形变监测几何模型Fig.2 Deformation monitoring geometric model
ΔR=r·cosθ
(14)
根据图1形变提取原理可知,雷达到观测区域内任意一点P的LoS向位移ΔR=R1-R2,利用余弦定理可以得到LoS向位移与滑坡方向的关系如式(15)所示[23],求解方程可得LoS向位移表达式为式(16)所示,LoS向位移与斜距R1、映射角θ、干涉相位φ有关。
(15)
(16)
LoS向位移解算根据映射角θ大小作相应变化,式中θ∈(0°,90°)时取正号,θ∈(90°,180°)时取负号,当映射角θ为0时,LoS向位移ΔR即为滑坡方向位移r,当映射角θ接近90°时,雷达几乎失去监测能力,因此在测试精度过程中对观测目标进行布局时,考虑获取被测目标足够的散射特性的同时,雷达视线与被测目标的夹角应尽量小。
3.2 SNR对精度的影响
一般雷达,若具有相干匹配的收发系统,其信噪比方程为[27]:
(17)

进一步考虑系统分辨率以及目标雷达截面积,便携式全方位雷达系统的距离向和方位向的分辨率分别为ρr和ρa,则:
(18)
式中,σ0为地面后向散射系数,β为目标到天线的连线与旋转平面之间的夹角,ρy=ρr/cosβ为距离向分辨单元长度,具体几何模型如文献[18]中所述,其中ρa可表示为[18]:
(19)
式中,ω为旋转系统的角速度(rad/s),L为旋转半径,θB为方位角波束宽度,Ba为多普勒带宽,Ba具体可表示为:
(20)
式(17)可以重写为:
(21)
其中,NR表示单次脉冲收发次数,Tr为脉冲持续时间,其他符号意义与式(17)相同,要提高系统的整体性能,需要增加系统发射脉冲次数和脉冲信号持续时间。实际中,脉冲的收发次数取决于方位向多普勒带宽,需满足奈奎斯特采样定理:
(22)
式中,θd为旋转角度间隔,Tk为系统旋转采样一周所需的时间。因此,在便携式全方位雷达成像系统性能评估中,各系统的参数设计均会影响到系统的整体性能,需要综合权衡。

表1 系统性能分析参数设置
如图3中,在RCS不同的情况下,分别是在,σ=0 dBsm,σ=-10 dBsm,σ=-20 dBsm得到的探测距离与SNR的关系;图4中,发射功率分别是Pt=30 dBm,Pt=20 dBm,Pt=10 dBm得到探测距离与SNR的关系。从图中可以看出,随着距离的增加,信噪比逐渐下降,会对形变监测精度造成一定的影响。但按照实际的系统参数设置,系统在5 km处SNR仍在3 dB以上。因此,该系统可保证5 km以内的监测精度。

图3 RCS不同,SNR相对距离曲线Fig.3 Different RCS, SNR relative distance curve
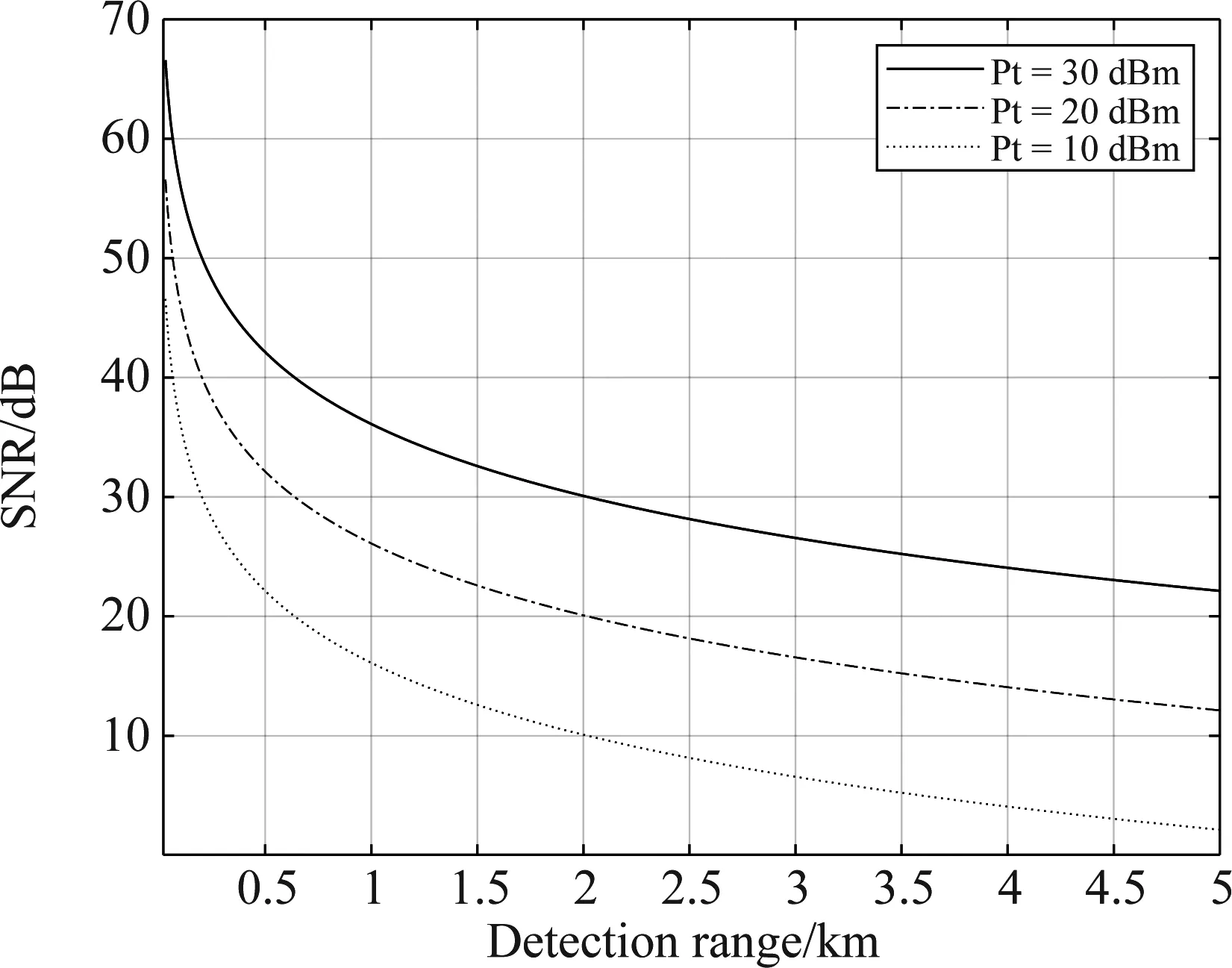
图4 发射功率不同,SNR相对距离曲线Fig.4 Different transmit power, SNR relative distance curve
4 微变监测雷达精度验证方案
基于前述干涉测量原理和微变监测雷达系统基本工作原理,确定本试验方案。精度验证实验从两个方面开展:一是以角反射器为实验目标开展一维形变监测验证分析;二是以分布式角反射器模拟观测场景,开展二维形变监测进行精度验证分析。
4.1 便携式全方位系统基本工作原理
本文采用便携式全方位微变监测雷达系统为精度测试实验平台。该系统使用二维高精度转台携带天线,通过距离压缩实现距离向分辨,通过方位机械扫描实现方位向分辨,进而实现对观测区域的全方位成像观测与形变监测。便携式全方位系统主要包括雷达收发分系统、天线分系统、数字云台分系统以及主控系统等,如图5所示。

图5 便携式全方位微变监测雷达系统Fig.5 Portable omni-directional scanning Micro Deformation Monitoring radar system
便携式全方位微变监测雷达系统可实现0°~360°全方位的监测范围覆盖,系统通过计算机对各个分系统进行控制,根据实验需求可对相关参数进行设定,进而实现近实时采集观测目标场景幅度、相位等信息。微变监测雷达反演形变信息的质量通常取决于干涉相位的质量,如果图像在获取数据的期间,观测目标特性没有大的变化,即后向散射特性没有变化,我们就可以忽略它对相位的影响,从而通过时序测量的SAR图像得到干涉图像。
4.2 一维形变监测实验
本实验布设于室外场地,实验中采取手动移动角反射器的方式,为保证移动精度,将棱镜与角反射器刚性连接,使用全站仪对实际移动距离进行测量。实验中布设A、B、C三个三面角反射器作为观测目标,角反射器的发射面中心法向位于雷达视线范围内。
第一组实验只移动B角反射器,验证其在多个目标下的位移精度;第二组实验同时移动A、B角反射器,验证其位移方向和雷达的关系。各角反射器的布置情况如图6所示。实验中便携式全方位微变监测雷达系统参数如表2所示。

图6 角反射器布置情况Fig.6 Layout of corner reflector

表2 便携式全方位微变监测雷达系统参数
观测区域目标的一维距离像如图7所示,角反射器目标反射较强,可以清晰看到目标的距离和散射强度信息。
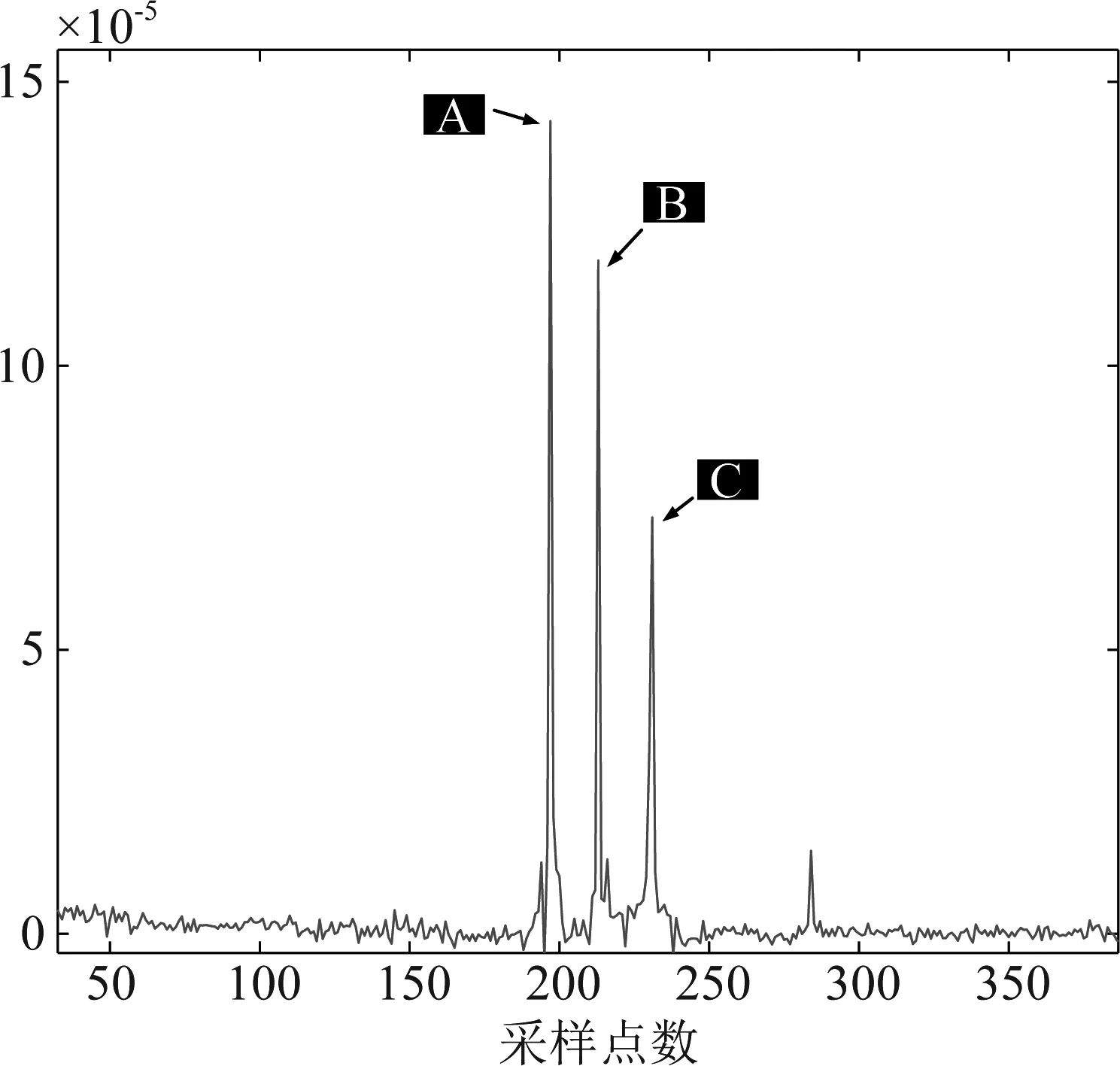
图7 一维距离像Fig.7 One-dimensional distance profile
4.2.1实验1单目标位移
本组实验只对B角反射器沿靠近雷达方向移动,每次移动2 mm,由于采取手动移动角反射器的方式,故最终以全站仪实测数据为准,其中A、C角反射器作为稳定目标监测点。表3为对B角反射器进行毫米级调节时,微变监测雷达系统的监测值与全站仪测量结果对比结果。图8为A、C角反射器的雷达监测数值。
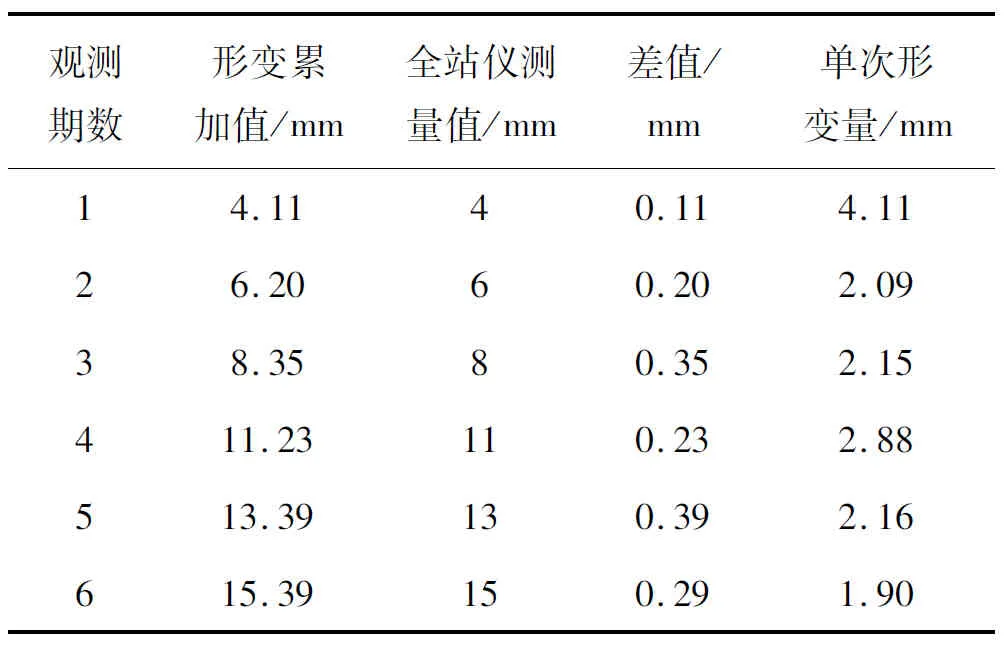
表3 B角反射器形变位移与全站仪测量值对比

图8 A、C角反射器雷达监测值Fig.8 A, C corner reflector radar monitoring value
4.2.2实验2多目标位移
本组实验对A、B角反射器同时进行移动,C角反射器作为稳定目标监测点。其中将A角反射器沿靠近雷达视线方向移动,B角反射器沿远离雷达视线方向移动;每次移动2 mm,共移动4次。得到的位移数值正值代表靠近雷达视线方向,负值代表远离雷达视线方向。表4分别为A、B角反射器雷达监测值与全站仪测量值结果对比,图9为C角反射器雷达监测数值。

表4 A、B角反射器形变位移与全站仪测量值对比
4.2.3结果分析
通过对点目标一维图像分析,确定系统控制软件正确设置了参数并协调各分系统同步工作。通过比较表2中B角反射器的雷达监测值与全站仪测量值可以发现,其形变趋势与实际移动情况吻合,总体测量精度保持在亚毫米级,单次测量误差均值为0.12 mm,均方根误差为0.12;设置的稳定参考角反射器A、C,测量均值分别为0.05 mm和0.04 mm,在0.1 mm之内。比较同时移动A、B角反射器的监测情况可以看出,其形变趋势与设计的实际移动值吻合情况较好,需要注意的是,表中给出的差值为累积误差,查看A、B角反射器的单次测量误差均值分别为0.08 mm和0.10 mm,均方根误差为0.08;设计的参考角反射器C,其测量均值为0.03 mm,在0.1 mm之内。在实验1和实验2中,设置的固定角反射器虽然测量均值都在0.1 mm之内,但在监测期间实际并无位移发生,分析其主要原因可能为系统噪声、随机噪声等误差源并未完全消除所致;再者,由于本文最终测量结果是与全站仪测量结果进行对比,在进行单目标位移和多目标位移时,不排除由全站仪本身的误差对实验结果造成影响。但总体来说,实验结果与实际情况吻合较好,便携式全方位微变监测雷达的一维形变监测精度可达亚毫米级。
4.3 二维形变监测实验
本次实验设置五个角反射器,实验场景依旧选择在室外环境中进行,使用精度滑台进行手鼓转动调节角反射器的位移量,手动滑台设定了手鼓标尺,移动精度优于0.025 mm,满足实验要求。角反射器固定在精度滑台上,其发射面中心法向位于雷达视线范围内。
实验分为两组,为保证解算形变值的准确性,设置多个稳定角反射器作为参考目标。第一组实验角反射器B为监测目标,以角反射器A、C、D、E为参考目标。将B角反射器沿靠近雷达视线方向移动;第二组实验角反射器A、B为监测目标,角反射器C、D、E为参考目标。两组实验每移动一次均采集两景数据。各角反射器布置情况如图10所示。
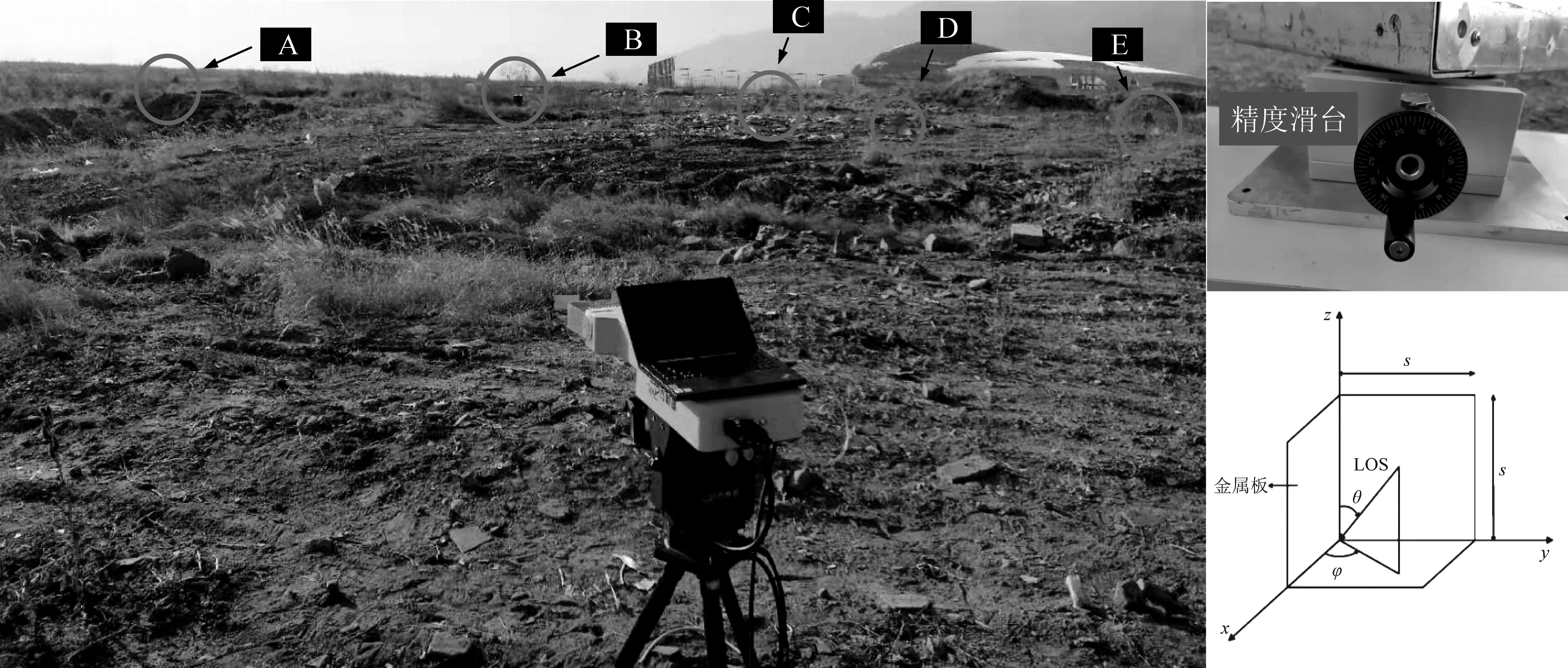
图10 角反射器布置情况Fig.10 Layout of corner reflector
观测期间,数据采集间隔为2 min,距离向分辨率为0.3 m,方位向分辨率为1°,实验中移动的目标角反射器距离雷达约50 m。图11为实验监测目标的雷达图像,图12为实验场景相干系数图像,从两图中均可以清晰的看出角反射器的位置。

图11 角反射器放置区域目标雷达图像Fig.11 Radar image of the target in the area where the corner reflector is placed
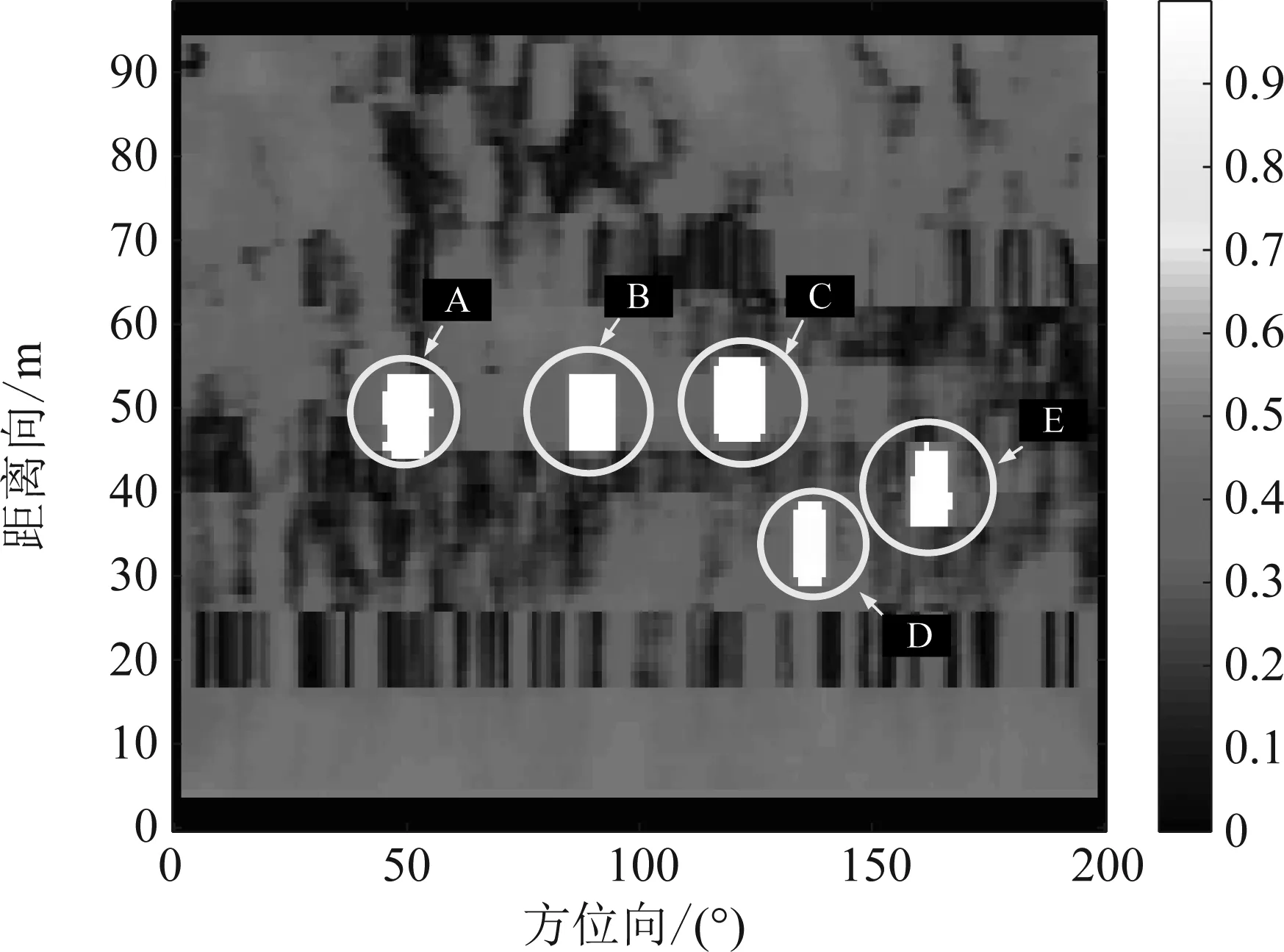
图12 角反射器放置区域相干系数图Fig.12 Coherence coefficient diagram of corner reflector placement area
4.3.1实验1单目标位移
本组实验将B角反射器沿靠近雷达视线方向进行移动,每次移动2 mm,共移动3次,每次采集两景数据。表5为不同时间序列下实际累加移动距离与雷达形变累加值的对比情况,图13角反射器B的形变提取结果,其他角反射器未见明显形变监测结果。

表5 B角反射器形变位移与实际移动值对比

图13 B角反射器累加形变图Fig.13 Cumulative deformation map of B corner reflector
4.3.2实验2多目标位移
本组实验将A、B角反射器分别沿远离雷达视线和靠近雷达视线方向移动,每次移动1.5 mm,同样采集两景数据,表6为A、B角反射器的实际移动距离与雷达形变累加值对比情况,提取A、B角反射器的形变值如图14所示。
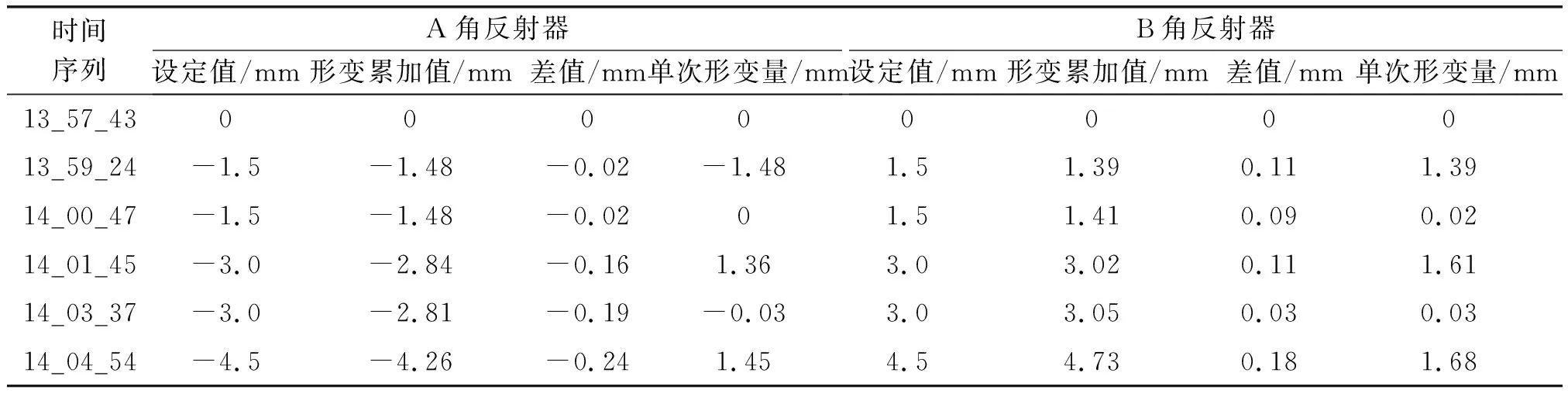
表6 A、B角反射器形变位移与实际移动值对比

图14 A、B角反射器累加形变图Fig.14 Cumulative deformation map of A and B corner reflector
4.3.3结果分析
分析形变测量结果与实际移动移动距离对比结果可以发现,总体上雷达形变位移值与设定的实际移动距离吻合性较好,且设定的稳定目标在监测期间也无明显形变产生。实验1只移动B角反射器,雷达形变位移值与实际移动距离差值最大值与最小值分别为0.16 mm和0.04 mm,均方根误差为0.11 mm,累积误差为0.17 mm,由此验证了在多个观测目标下,单目标发生位移的形变监测精度;实验2同时移动A、B角反射器,其雷达形变值与实际移动距离最大差值分别为0.14 mm和0.18 mm,最小差值分别为0.02 mm和0.11 mm,均方根分别为0.09 mm和0.14 mm,累积误差分别为-0.24 mm和0.18 mm,从图14累加形变图可以看出,A、B角反射器的形变监测值与设定的形变趋势方向一致,由此验证了在多目标同时发生形变时,位移方向与雷达的关系。理论上实际移动距离与所测形变值应精确吻合,由3.1节分析可知,只有在雷达与被测目标保持绝对平行,雷达测量值即为目标实际移动值,但在实际测量场景中,很难保证雷达与被测目标保持绝对平行或测算雷达视线方向与被测目标位移方向之间的映射角足够准确,由此解算的形变监测结果与实际移动结果进行对比,可能会导致较小数量级的偏差。
5 结论
便携式全方位微变监测雷达形变监测精度往往是实际应用中较为关心的问题。为此,本文对便携式全方位微变监测雷达系统进行精度测试方案设计。首先对成像几何和回波信号进行分析,得到一维、二维形变监测模型;然后分别通过设计一维、二维形变监测实验测试系统监测精度。实验结果表明,一维、二维形变监测实验中,在多个观测目标中移动单个角反射器,测量精度保持在亚毫米级,沿不同位移方向同时移动两个角反射器,其形变趋势与实际移动情况吻合,验证了便携式全方位微变监测雷达系统的监测性能。
