一种旋转切割式香蕉收割机控制设计
2021-09-29桂林电子科技大学机电工程学院韦茗中杨孟杰韦义康
桂林电子科技大学机电工程学院 韦茗中 杨孟杰 韦义康 石 捷
结合当前人工采摘香蕉经验与原理,同时针对市场上常规收割机器效率较低的问题,文章提出一款旋转切割式的香蕉收割机设计。文章提出的香蕉收割机主要由夹持机构、旋转切割机构、机械臂机构、旋转底座装置和感应控制系统组成。装置实现了使用弧形刀片沿刀片轨道高速旋转切割香蕉柄,保证平稳切割香蕉柄,同时不碰伤果实,降低果实损耗率,提高了收割效率。
香蕉目前是世界第一大出口贸易水果,而随着世界经济水平的提升,消费水平也水涨船高,再加上世界香蕉品质的提升,必然会为香蕉进入国际市场腾出更大的市场空间,香蕉世界贸易量未来几年仍会稳定增长。这对于中国的香蕉产业的发展来说,既有国外市场的机遇,也有在本国内部扩容的机遇。在未来,香蕉种植规模会愈加庞大,单依靠传统收割技术进行收获,所消耗的成本会随之增加。目前,香蕉采摘一般是采用人工采收和机械采收两种方式,人工采收一般由2到3人组成一组,其中1人负责割断穗杆,1人负责缚果梳,1人负责将果梳搬至加工工厂。这种采收方式收到人为因素影响极大,很难保障香蕉的收获品质。除此之外,香蕉还受天气的影响,需要在一定时间内完成香蕉采摘,这些都严重影响香蕉收割进程。文章提出了一种可精准切割香蕉串而不致其损伤,且收割效率较高的旋转切割式香蕉收割机设计,综合保证了香蕉的收获品质。
1 装置介绍
该机器由夹持机构、旋转切割机构、机械臂机构、旋转底座装置和感应控制系统组成,整体机械装置如图1所示。
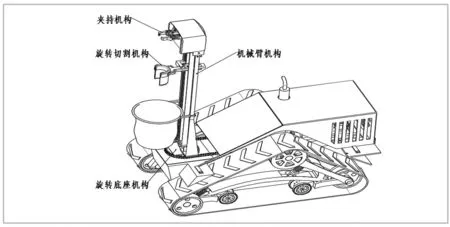
图1 整体机械模型图
1.1 夹持机构
夹持机构(如图2所示),所述夹持机构是由电机、夹持齿轮、传动齿条和机械爪组成。为了可以确保夹持机构可以抱紧香蕉果轴,以便于收割。夹持机构可以包括夹持电机,夹持电机的输出轴与一夹持齿轮固定连接带动其转动,所述夹持齿轮与一传动齿条的一端啮合带动其前后移动,传动齿条的另一端两侧分别与1根第一连杆的一端铰接带动其里外移动,2根第一连杆的另一端分别与1根第二连杆铰接带动其里外移动,2根第二连杆分别与机械抓的一抓牙铰接带动机械抓张合。
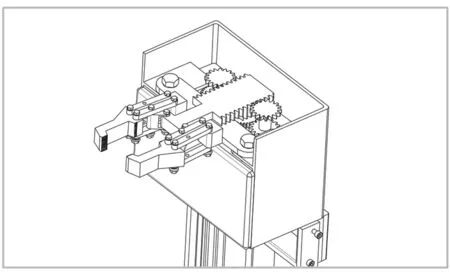
图2 夹持机构
1.2 旋转切割机构和机械臂机构
旋转切割机构(如图3所示),所述旋转切割机构安装于机械臂上且可沿机械臂上下运动并位于夹持机构正下方,其包括弧形刀片、与弧形刀片形状相同的刀片轨道、刀片开合驱动装置和竖向驱动装置,同时搭载了工业高清摄像头。
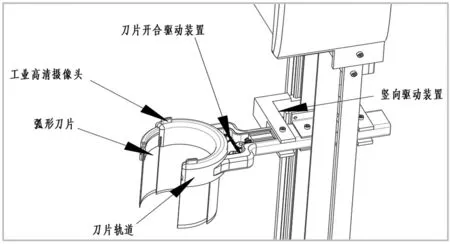
图3 旋转切割机构图解
调查显示:市面大多的香蕉收割装置为一种回转式香蕉落梳机,包括机架、电机、第一齿轮、第二齿轮、轴承、轴套、刀盘、刀架、第一落梳刀和第二落梳刀,其有减少香蕉表面损伤等特点。但是上述装置存在以下缺点:1、香蕉穗杆通常为弯曲状,在旋转切割,易于切裂果柄造成果把散开,还会损伤果实。2、在收割过程中,香蕉穗杆向下运动中,因香蕉梳的重量和向下拉力的作用,易于损伤香蕉树甚至香蕉穗杆而无法完成收割。3、该装置仅实现了香蕉果穗收割的半自动机械化,仍需要其人力将香蕉穗杆插入夹持孔内,效率提高效果有限。
本产品解决了这些问题,旋转切割机构在夹持机构抓紧香蕉果轴时,通过工业高清摄像头观察香蕉果轴位置,弧形刀片转出刀片轨道贴合香蕉果轴,然后在刀片旋转驱动装置的带动下实现优弧形刀片的快速旋转,同时在竖向驱动装置的带动下旋转切割机构沿着机械臂下滑,实现香蕉果柄的切割,切割后的香蕉果柄落入收割袋中,完成香蕉的收割过程。
弧形刀片的上端安装于刀片轨道内,并沿其周向开设有齿状带,弧形刀片和刀片轨道和弧长均为优弧,弧形刀片的弧长大于刀片轨道缺口部分的弧长。刀片轨道通过滑块与竖向驱动装置连接。
机械臂机构,机构含竖向驱动装置和收割袋装置。竖向驱动装置是由链条、皮带,加上电机、齿轮等结构组成的直线驱动装置。具体为竖向电机的输出轴与竖向主动轮固定连接,竖向主动轮通过竖向皮带与安装在机械臂上端的竖向从动轮连接,滑块连接在竖向皮带上,且滑块的一端嵌入机械臂的滑轨内,实现滑块的上下运动。收割袋装置安装于旋转切割机构的正下方,便于对切割后的香蕉进行包装。
1.3 旋转底座机构
旋转底座装置(如图4所示),旋转底座安装于行驶小车的前部。所含的旋转电机的输出轴与旋转主动齿轮固定连接带动其转动。旋转主动齿轮通过一旋转链条与旋转从动齿轮连接带动,从而带动机械臂旋转。如此,机器可以从香蕉串的任意角度收割香蕉,以提高收割的效率和减少对香蕉果实的损伤。

图4 旋转底座装置
1.4 控制系统组成
该设计的控制系统,通过有线或无线方式与夹持机构和旋转切割机构连接并控制其运动。其中有线方式可以为mod-bus、485、232等,或者上述各类有线通信方式的组合。无线方式可以为WiFi、4G、ZigBee、射频(Radio Frequency,RF)、蓝牙(Bluetooth)等,或者上述各类无线通信方式的组合。上述网络的实例包括但企业内部网、互联网、移动通信网等。
2 具体实施方式
首先,香蕉收割机的夹持装置处于一定高度,其张开范围大于寻常香蕉串直径,合并的范围小于寻常香蕉串的直径,香蕉串在竖直向下旋转切割时,因夹持装置的抓取,能够快速,平稳的完成采摘。在进行竖直向下旋转切割前,旋转切割机构前端两个高清摄像头的辅助下,可精准捕捉香蕉串位置。旋转切割机构中,刀片电机的输出轴与一锥型齿轮连接带动其旋转,所述锥型齿轮与一刀片齿轮啮合带动其旋转,该刀片齿轮与一刀片链条啮合带动刀片链条运动,刀片链条与齿状带啮合控制优弧形刀片的旋转,完成装置闭合动作。再由竖向驱动装置通过所述滑块连接于机械臂上且可沿机械臂上下运动,完成香蕉果实和穗杆的分离。香蕉果实落入设于下方的收割袋,很大程度减少了香蕉落下的冲力,避免香蕉收到二次伤害。机械臂机构与旋转底座机构连接在一起,可实现从香蕉串的任意角度收割香蕉,能更加得心应手的应对各种收获香蕉的环境。
3 装置特点
3.1 精准高效
夹持机构抱紧固定香蕉轴,保证旋转切割机构能够快速、平稳切割香蕉柄,实现精准切割。弧形刀片沿刀片轨道高速旋转切割香蕉柄,且同时通过竖向驱动装置带动向下移动切割香蕉柄,实现对香蕉串从上往下高效采摘香蕉。
3.2 对果实损伤小
夹持机构、旋转切割机构、收割袋垂直于机械臂,且从上往下位于一条垂直线上,保证了切割下来的香蕉掉入袋子中,减少运输中对果实的伤害,进一步降低果实损耗率。
香蕉凭借着香甜软糯的独特的口感深受到人们的喜爱,香蕉种植规模也愈加庞大。市面上已有的收获机械大多效率不高、果实损伤率较高。因此,本所述的一种旋转切割式香蕉收割机设计针对以上问题考虑,实现了果实收割包装合为一体,具有减少体力劳动、提高香蕉产后处理效率及减少香蕉表面损伤等特点,贴合果农的实际需求,具有较高市场价值。
