二次雷达识别方式的任务映射方法研究
2021-09-29四川九洲空管科技有限责任公司彭杰文陈兴德张中南
四川九洲空管科技有限责任公司 彭杰文 陈兴德 张中南
二次雷达在目标探测识别中具有十分重要的作用。本文介绍了三种目标识别方式,并重点讲解了其任务映射方法,通过方法的描述和示意,能够让这三种识别方法更轻松的被应用,从而达到提升我们二次雷达目标识别探测效率的目的。
现代二次雷达经过不断的发展,能够满足空管监视和目标识别等多种应用场景使用需求。在目标识别场景中,二次雷达通常需要完成多种方式的识别。本文将针对二次雷达主要的目标识别方式进行介绍,并重点讨论识别方式到二次雷达任务映射的方法。
1 任务分类及说明
二次雷达的常用的识别方式分为三种:目标牵引识别、扇区识别、区域识别。
目标牵引识别常用于操作员对已获取位置信息的目标进行身份识别验证。
扇区识别常用于操作员对某方位区间内的所有目标进行身份识别验证。
区域识别常用于操作员对某重点区域内的所有目标进行身份识别验证。
2 目标牵引识别任务映射方法
2.1 映射方法概述
目标牵引识别常用于操作员对一次雷达探测得到的目标进行身份验证。通过将目标的探测时间、任务映射方位、任务映射距离、编号、识别模式等信息整合后,发送至二次雷达进行探测识别。
2.2 映射方法计算及说明
目标牵引识别方式映射到二次雷达任务执行时,需要根据一次雷达与二次雷达的牵引处理延时完成任务映射位置的计算。
计算所需参数及标识如下:
一次雷达目标探测时间:ttc;一次雷达与二次雷达牵引处理延时:tdelay;
一次雷达目标探测方位:azitc;一次雷达目标探测距离:rangetc;
一次雷达目标方位变化值:Δazitc;一次雷达目标距离变化值:Δrangetc;
二次雷达任务映射方位:azitask;二次雷达任务映射距离:rangetask。
计算基本方法:

3 扇区识别任务映射方法
3.1 映射方法概述
扇区识别常用于操作员对相对二次雷达方位区间或相对正北方位区间的目标进行身份验证。通过将扇区的起始方位、结束方位、识别模式等信息整合后,发送至二次雷达进行探测识别。
3.2 映射方法计算及说明
扇区识别方式映射到二次雷达任务执行时,需要完成相对二次雷达的方位范围计算。
计算所需参数及标识如下:
扇区起始方位:azisec-atart;扇区结束方位:azisec-end;
二次雷达参考方位:azissr-north;二次雷达任务映射方位:azitask。
计算基本方法:

4 区域识别任务映射方法
4.1 映射方法概述
区域识别常用于操作员对某重点区域内的所有目标进行身份识别验证。该重点区域在操作界面通过凸多边形的方式进行标识。通过将区域的凸多边形的所有顶点地理位置和顶点顺序、识别模式等信息整合后,发送至二次雷达进行探测识别。
4.2 映射方法计算及说明
区域识别方式映射到二次雷达任务执行时,需要完成相对二次雷达的方位和距离范围计算。
计算所需参数及标识如下:
二次雷达地理位置:posssr(Lon, Lat);二次雷达参考方位:azissr-north;
区域凸多边形顶点顺序及其地理位置:posarea(Lon, Lat, N);
二次雷达任务映射方位:azitask;二次雷达任务映射距离:rangetask。
(1)区域识别二次雷达任务映射方位区间计算:
步骤1:依次计算所有顶点与二次雷达相对正北的方位,然后再转换到相对二次雷达参考方位的夹角。计算表示如下:

F(x)表示常用的经纬度转方位距离的算法。
步骤2:将所有顶点相对于二次雷达参考方位的角度进行两两相减,得到所有顶点之间的夹角,夹角值均小于等于180°。计算表示如下:
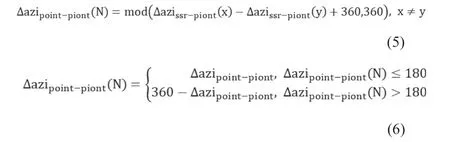
步骤3:通过排列算法获取最大夹角的起始顶点和结束顶点。计算表示如下:

步骤4:遍历非最大夹角两个顶点之外的所有顶点,获取这些顶点与最大夹角的起始顶点与结束顶点的两个夹角。判断两个夹角之和是否大于180°,若是,则表明二次雷达处于区域凸多边形内部,识别方位应为全方位;若否,则表明二次雷达处于区域凸多边形外部,识别方位应为最大夹角的两个顶点的方位夹角。计算表示如下:

azisum表示任意顶点与最大夹角的起始和结束顶点形成的两个角度之和。

(2)区域识别二次雷达任务映射距离区间计算:
步骤1:依次计算所有顶点与二次雷达相对距离。计算表示如下:

F(x)表示常用的经纬度转方位距离的算法。
步骤2:通过排列算法获取最远距离和最近距离的顶点,得到区域的距离区间。计算表示如下:

5 方法总结
目标牵引识别方法的重点是需要结合探测目标的历史轨迹和一次二次的牵引处理延时进行目标位置预测,得到任务映射位置。
扇区识别方法的重点是需要根据二次雷达参考方位转换扇区的起始和结束方位,从而得到任务映射的方位。
区域识别方法的重点有两点:解算区域顶点位置与二次雷达的相对方位;判断二次雷达与区域的内外位置关系。
本文通过介绍目标牵引识别、扇区识别、区域识别三种目标识别方式的任务映射方法,这三种方法已通过多个项目平台的应用得到验证,能够有效满足我们在绝大部分应用场景下的目标识别任务映射需求。
