宽谱段相移干涉多自由度采集系统设计与分析
2021-09-27蔡娅雯张庆君刘久利
蔡娅雯,张庆君,刘 杰,张 玥,刘久利
(中国空间技术研究院 遥感卫星总体部,北京 100084)
引言
传统的成像系统受到硬件和方法的制约,记录下来的只是高维的光信号在二维采样子空间中的光谱投影,丢失了深度、角度和光谱维的完整信息,限制了其对于场景的进一步应用[1]。角度信息的补偿可以通过多视角拍摄来解决,因此深度信息和光谱信息的采集是计算摄像学领域中的主要技术难点。在航天航空等工业领域,深度信息在精密装配、高精度装调、智能机器人等领域中扮演着主要的角色,而光谱信息在环境探测、航天航空、材质分类等领域中有着重要的应用价值,因此深度光谱的联合采集有着实际的研究价值和广阔的应用前景。
光线在场景中传播的过程中,耦合了场景的深度、光谱等信息,因此获得待测物光波的强度和相位分布可以对场景进行解析。相移干涉技术(phaseshifting interferometry,PSI)是一种波前相位测量技术,通过调制产生多幅干涉图,并从中获得待测物光波的相位分布。
相移干涉技术最早由Carré等人在1966年提出[2],他们采用四步相移技术得到4幅干涉条纹图,从而计算得到待测物光波的相位信息。1974年,Bruning等人[3]进一步发展了相移干涉技术,在同步检波技术和傅里叶级数信号处理的基础上,采用压电陶瓷发生相移,奠定了高精度相移技术的基础。后续发展出三步[4]、四步[5]、五步[6]等定步长相移算法,以及Carré[2]、Schwider[7]和Stoilve[8]等步长相移算法。文献[9]中对比了定步长与等步长相移干涉仪的误差性能,得出五步相移算法和Stoilov算法基本不受移相误差和探测器非线性误差影响的结论。由于Stoilov算法计算复杂度比五步相移算法高很多,因此五步相移算法不管是抗干扰能力还是计算复杂度都有着极高的性能。相移干涉技术具有很高的干涉计量精度,最高可以达到λ/100[10],然而传统相移干涉技术因为反正切函数的周期性,最多只能测量λ大小的深度范围。2000年,Wanger[11]首次将双波长技术运用到相移干涉系统中,将深度测量范围扩展到了mm级。2012年,Li Xu等人[12]选取838 nm~ 853 nm内14个不同波长的光源对物体进行三维重建,并采用傅里叶变换技术恢复相位,测量带宽达150 mm。2018年,H Gao等人[13]采用五步相移白光干涉法测量光纤非本征法布里-珀罗干涉仪(EFPI)的绝对腔长,测量分辨率达到um级,测量带宽仅12 mm。
本文针对传统相移干涉系统无法实现大景深范围和同步测量光谱信息的难题,提出了宽谱段相移干涉深度光谱联合采集方法,并运用全波段白光激光器构建了新型的相位成像系统,同时讨论了光学仪器的具体选型。仿真试验验证了本系统应用于工业产品的测量领域,能够获得高分辨率、宽测量范围的深度采集和光谱联合采集的效果。
1 宽谱段相移干涉多自由度采集系统的工作原理
本文搭建的系统如图1所示。该系统的基本工作原理为:全波段白光激光器作为发射光源,光源发出的白光经过滤波片后谱段截断为400 nm~700 nm。可见光经过光栅色散和DMD进行频率筛选,产生不同波长的光信号,每次筛选之后发射光波为单一频率的光信号。使用分光器将筛选后的光信号分成两部分,一部分为物体反射光束,另一部分为参考光束。对于参考光束,使用衰减片进行振幅衰减,之后用空间光调制器(SLM)进行相位调制,从而在采集端产生偏移相位而异的干涉图序列。因激光器发射的是准直光信号,在参考光束的光路中需要引入扩束组来扩展光信号的照射范围,而物光采用扩束和透镜扩散的方式遍历整个场景。物光耦合了场景中物体的信息后,经过透镜成像,在合束镜中参考光和物光整合到一起,并在探测器中形成干涉图像。

图1 多自由度采集系统Fig.1 Multi-degree of freedom acquisition system
光源部分波长范围为400 nm~2 400 nm,功率可以达到15 W,其中可见光功率大于3 W。DMD微镜分辨率为1 920 pixel × 1 080 pixel,微镜元尺寸为10.8 μm。因选用400 nm~ 700 nm波段进行试验,当光线覆盖1 500个微镜上时,每个微镜输出的单色光谱带宽为0.2 nm,单色光功率超过2 mW。空间光调制器通过利用外电压改变液晶分子的内部排列控制液晶的折射特性,从而实现对光信号的纯相位调制[14]。SCMOS相机的成像尺寸为15.2 mm,450 nm~700 nm谱段内量子效率高于60%,其有效像素数为2 048 × 2 048,成像尺寸为13.3 mm ×13.3 mm,单像素尺寸6.5 μm × 6.5 μm。
2 深度光谱联合采集算法
全波段激光发射器可以发射不同频率的光波,相当于频率调制的光源,发射的光信号fl(t)可以表示为

式中:A0为发射光信号的初始振幅; ϕ0为初始相位;ν为发射频率。
分束镜将光源发出的光分成两部分——物体反射光束和参考光束。对于参考光束,使用空间光调制器(SLM)调制相位,用于在采集端生成因偏移相位而异的干涉图,因此参考光fref(t)可以表示为

式中:ϕ为可调相位; τref为参考光从光源到采集端的时间延迟。
对于物光fobj(t),从光源处发出经过物体反射回到采集端,其振幅信息与物体的反射系数相关,产生的相位延迟与物体的深度相关,即物光耦合了场景的信息,可以表示为

式中: τobj为物光从光源到采集端的时间延迟;Aobj=α(ν)A0, α (ν)表示在不同频率光的照射下,物体的光谱反射系数。
对于每一个发射频率,在采集端都可以获取与偏移相位相关的物光与参考光的干涉图像I(ϕ):

(4)式中,造成相位延迟差 2 πν(τobj−τref)的原因就是物光与参考光之间的光程差,也即为光在场景中传播的距离D(物体深度d的2倍):

因此如果想要从采集到的干涉图像I(ϕ)中恢复每一像素点对应物体的深度信息,就必须求得相位延迟差,即分别调制 ϕ =0,π/2,π,3π/2,2π:

式中:n是正整数。因为四象限的反正切函数求得解的范围在 −π/2 ~ π/2之间,由于三角函数本身的周期性,并不能准确求得物体的深度d:

由此,我们采用多波长解包裹来解决这一问题[15]。

由(6)式可知,对于每一个频率ν( 波长 λ)可以得到一个测量相位 Θ (λ)。而由(7)式可知物体的真实深度d与测量相位 Θ (λ)存在周期变化的关系,自然可以想到引入一个余弦函数,令 Θ(λ)为起始相位,构造如下的形式:

式中:M表示使用的不同的测量频率数。对于多频率的测量数据对 λk和 Θ(λk),物体的真实深度d会使(9)式中每一个相加的余弦函数都取得最大值。进而可以通过找到方程(9)的峰值来求得物体的真实深度,消除相位恢复中的周期性问题。
由于(9)式中峰值的位置会受高频振荡和系统相位的影响而难以准确求解,因此采用复数形式并求其模,这样就得到了其包络函数,包络函数的峰值不会受到高频振荡和相位的影响,从而易于求解,包络函数为

通过上述方法求得了场景深度d,接下来求解不同频率的光信号照射下,物体表面的反射系数是怎样变化的,也即求出 α(ν),这也就是物体的反射光谱,其包含了物体的物质结构相关的信息。对于每一个频率,将求得的相位差和调制相位(ϕ=0,π)代入(4)式,可以得到联立方程组:

从而可以得到:

3 仿真试验与结果
本文采用了Matlab /Simulink仿真软件进行仿真分析。仿真模型如图2所示。各仿真模块采用S-Function编写。

图2 仿真模型Fig.2 Simulation model
本系统采用的白光光源通过滤波得到400 nm~700 nm宽谱段光线,经过光栅和透镜后,色散为连续准直的平行光,每一束光线的波长均不同。平行光线再经过DMD进行频率筛选,选择DMD微镜数目为NDMD, 可以得到光谱准确度为300nm/NDMD=∆λ的单色光,因此DMD的输出是波长为[x−∆λ/2,x+∆λ/2](x=400,400+∆λ,400+2∆λ,···, 700)nm的准直单色光。经过DMD后,采用分束镜对参考光和物体光进行分离,分束比为50∶50。
探测器接收的信号Spixel(ϕ)为

式中: σ 为探测器白噪声影响;T为曝光时间;干涉光强I代表了探测器在曝光时间T内记录的平均强度;TA−GBEw(λ)和TA−GBEr(λ)为物光和参考光经过扩束镜后产生的强度调制;TA−scene为场景对物体光的光谱反射率,即强度调制函数;为了参考光和物体光的强度处于同一个量级,使用衰减片对参考光进行强度调制,强度调制系数为TA−modulator。由于采用纯相位空间光调制器对参考光的相位进行调整,其相位调制函数为TP−SLM=exp(jϕ)。Tp−scene=exp[j2πντobj]为场景对物体光的相位调制函数,包含场景点的深度信息。
仿真试验中,由于光源的非单色性和噪声的存在,故光谱反射率TA−scene可表示为

3.1 深度采集仿真结果
考虑光源非单色性和白噪声干扰,在场景深度范围2 m、深度分辨率1 μm的情况下,设置DMD频率采样间隔为2 nm(150次筛选),仿真试验得到的深度计算结果如图3所示。
在光源的非单色性和SCMOS噪声的影响下,深度的测量范围可以达到m级,光源频率积分和噪声的存在缩短了计算周期。在图3(b)中,横坐标表示 (10)式中的待测深度d,纵坐标表示 (10)式的值,当场景深度为0.123 456时,仿真得到x=0.123 456时, (10)式的值最大,即计算得到的场景深度为0.123 456,系统的深度分辨率在μm级。

图3 非单色性和噪声干扰下的系统仿真结果Fig.3 System simulation results under interference of nonmonochromaticity and noise
在进行深度光谱采集时,可调节的系统参数包括光源的采样频率和光源的频率准确度。在使用多频率测量时,可以选择试验测量的次数,即光源的采样频率。采用DMD进行单色频率筛选,因此还可以选择DMD的筛选范围。如果选择DMD的微镜数目为1 500,则光谱准确度为300nm/1500=0.2nm,如果选择DMD微镜数目为1 000,光谱准确度为0.3 nm。
下面首先分析系统中使用的光谱采样频率对深度测量的影响,此时DMD微镜数目为1 500,即微镜输出谱宽为0.2 nm。
在场景深度范围为1 m,深度分辨率为1 μm的情况下,分别取光谱采样间隔为3 nm、2 nm、1.5 nm、1 nm。因光谱范围为400 nm~700 nm,所以使用DMD进行频率筛选的次数分别为100次、150次、200次和300次,从而得到的深度采集结果如图4所示。图中横坐标表示实际场景深度,纵坐标表示仿真试验测量得到的场景深度计算结果。
由图4可知,当光谱采样间隔为3 nm、2 nm、1.5 nm、1 nm时,即采样频率逐渐增高,深度采集的测量范围也越来越高。而当光谱采样间隔为2 nm时,在测量次数较少的情况下取得了较好的深度采集结果。

图4 光谱采样频率对深度采集结果的影响Fig.4 Influence of spectrum sampling frequency on depth acquisition results
光源的非单色性指的是光谱准确度受限,因DMD进行频率筛选时,每个微镜输出的光线为一定谱宽的非单色光,所以会对试验结果产生影响。图5展示了在2种不同的光谱准确度下的深度采集仿真结果,其中光谱准确度为0.2 nm时,选用DMD的微镜数目为1 500,而光谱准确度为0.3 nm时,DMD的微镜数目为1 000。
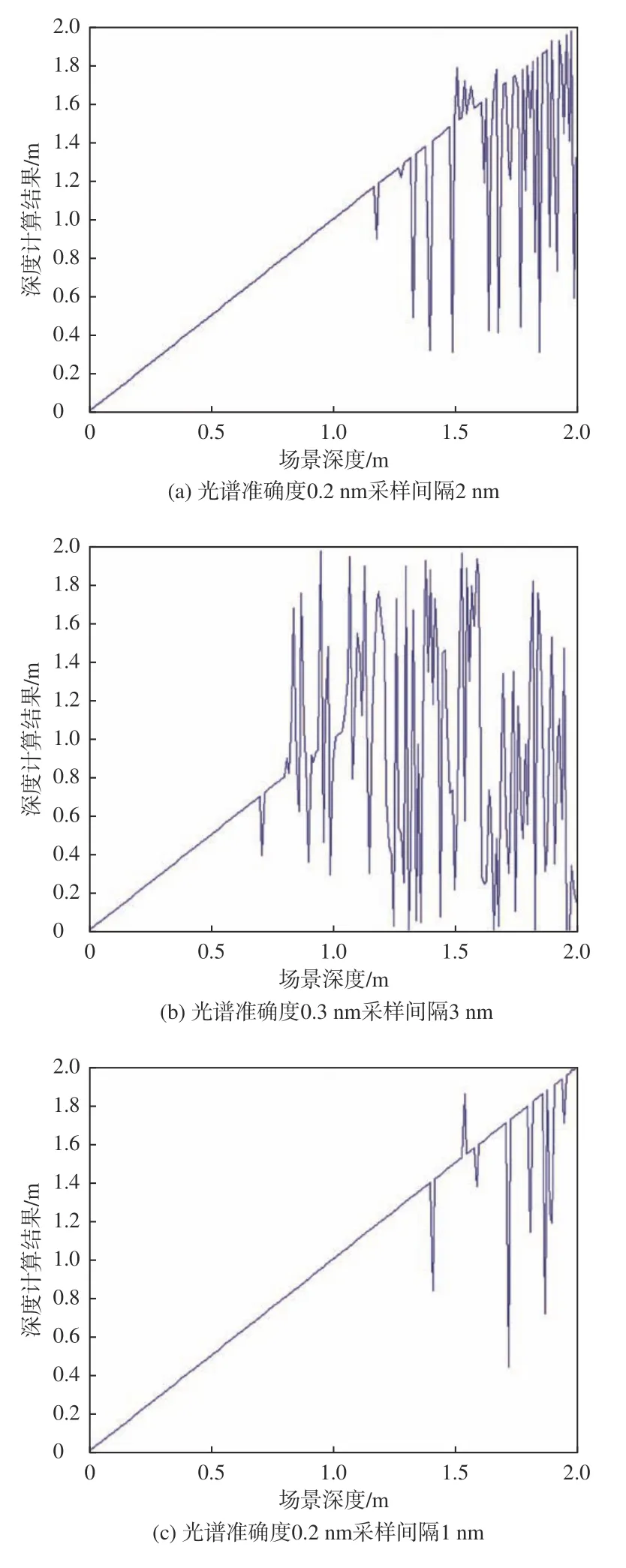

图5 光源的非单色性对深度采集结果的影响Fig.5 Influence of non-monochromaticity of light source on depth acquisition results
图5中每一排试验的光谱准确度和光谱采样间隔比值一致,此时第1列试验因为具有更高的光谱准确度,从而比第2列试验产生了更宽的深度测量范围。由此可见,当光谱准确度与光谱采样间隔比值一定时,高光谱准确度对应更宽的深度测量范围。
因此,在进行深度测量时,我们选取光谱范围为400 nm~ 700 nm,光谱采样间隔为2 nm,光谱准确度为0.2 nm进行仿真试验,可以得到m级的深度测量范围和μm级的深度分辨率。
以上考虑的都是单个像素的深度采集情况,而本文所搭建的系统在单个曝光时间内可以采集一整幅图像,并对其中的每个物点进行深度计算,其仿真效果如图6所示。其中采集的图像分辨率为1000 pixel × 1000 pixel,场景深度范围为0~1 m,深度分辨率为1 μm。


图6 1 000 × 1 000分辨率下的深度采集仿真结果Fig.6 Simulation results of depth acquisition with 1 000 ×1 000 resolution
由图6可知,本文系统能够有效实现m级范围场景深度获取,并且其精度可以达到um级,相对误差率小于0.01%。
3.2 光谱采集仿真结果
在考虑光的非单色性和SCMOS噪声的情况下,对光谱采集环节进行仿真。设置目标物体光谱反射率为0.1~0.7,仿真结果如图7所示。横坐标表示场景某一个物点在某一个波长下的光谱反射率,图7(a)纵坐标表示仿真试验计算的光谱反射率;图7(b)坐标为仿真试验计算的光谱反射率误差。
由图7可知,光谱测量误差相对于光谱反射率而言,最大不超过百分之一的量级,因此光源非单色性和噪声对光谱测量的影响非常小,并且因为系统中没有机械装备,其时间复杂度也很小。

图7 非单色性和噪声对光谱采集结果的影响Fig.7 Influence of non-monochromaticity and noise on spectrum acquisition results
因此,经过仿真验证,本系统的光谱测量误差只有0.1%。同时,由DMD频率筛选特性决定,本系统的光谱分辨率为1 nm,光谱范围为300 nm(可覆盖整个可见光区域),光谱准确度为0.2 nm,且时间复杂度较低。
4 结论
为了满足对现代工业领域中对复杂结构产品的高精度多自由度测量需求,本文构建了多自由度联合采集系统模型,介绍了一种基于相移干涉的深度光谱联合采集算法,定量解释了场景深度测量和光源频率之间的关系,验证了所设计系统的合理性。最后根据仪器的物理和光学参数对算法进行了具体实现,基于Simulink的仿真试验结果表明:深度测量精度在μm级,测量范围在m级;光谱检测分辨率在nm级,测量带宽为300 nm,光谱准确度为0.2 nm,误差率小于0.1%。本系统基本满足了现代工业精密测量中高深度分辨率、宽深度测量范围、高光谱准确度、高光谱分辨率的要求。
