水下对接遥控机器人水动力特性研究
2021-09-27杭州应用声学研究所中国船舶第七一五研究所黄俊雄
杭州应用声学研究所(中国船舶第七一五研究所) 黄俊雄
在交会对接技术中,水动力特性对ROV(遥控机器人)作业的安全性与稳定性非常重要,因此,需要对ROV不同航行模式与机械臂作业模式下的水动力特性进行仿真计算。首先基于ROV的结构与运动模式分析确定ROV的计算工况,主要包括直航、横移、升沉运动下的工况,根据ROV不同工况下的模型,确定流域与边界条件并合理划分网格;流场仿真计算模型主要采用了标准k-ε模型、标准壁面函数、simple算法来求解压力、速度耦合方程组,离散的代数方程用greengauss cell based法进行求解,对于流项中的压力均采用standard方式相差值,离散动量、湍动能、湍动耗散率均可以采用二阶迎风格式来进行计算。计算收敛,得到rov不同航行模式下胡水动力系数,为rov的具体设计、部件选型与运动控制提供数据支撑。
交会对接技术是指UUV与母艇能够在运动状态下完成精确对接,实现对UUV的能量补充以及UUV与母艇进行数据交换的技术,是无人装备在深海环境下开展回收、补给、维修、信息交换等保障服务的先决条件。通过深海交会对接自主控制,突破无人潜航器上艇应用的瓶颈问题,实现隐蔽投送与回收、能源补给和信息交换,显著提升航程、隐蔽性以及集群对抗能力。
本项目涉及的水下捕获对接技术是水下母艇利用搭载的遥控机器人(ROV)捕获UUV并与之对接,对接成功后母艇通过遥控机器人的脐带缆对UUV进行充电和传输信息。在交会对接技术中,ROV的水动力特性参数对ROV安全稳定工作起到关键作用。本文对ROV不同航行模式下的水动力特性进行仿真计算,得到ROV不同航行模式下的水动力系数,为ROV的具体设计、部件选型与运动控制提供数据支撑。
1 ROV主要结构与运动模式
ROV的主要结构如图1所示,ROV两侧对称分布四个相同的机械臂,在运动时抱紧母体,以便进行后续的信息传递或者充电等工作。

图1 ROV三维侧视图
2 计算模型与网格划分
将上述的三维模型导入ICEM软件中,设置流场并进行网格划分,靠近ROV主体的网格,设置了5层,比例为1.2,并且在边界处的网格进行了加密,模型尖锐处增加了更多的节点,进一步加密网格,以提高网格的质量和计算结果的准确性。网格模型采用标准k-ε模型、标准壁面函数、simple算法来求解压力、速度耦合方程组,离散的代数方程用green-gauss cell based法进行求解,对于流项中的压力均采用standard方式相差值,离散动量、湍动能、湍动耗散率均可以采用二阶迎风格式来进行计算。
2.1 直航运动情况
在直航情况下,选取长方体计算域,沿ROV纵向取6倍体长,左右两侧取6倍体长,上下两侧取6倍体长。流体的方向选取网格坐标系中的x轴正方向,网格流场的流体入口为流场左侧,流场右侧为流量出口,其他均设置为壁面,采用结构化网格划分,网格数量为3641893,网格质量均在0.25以上。
2.2 横移运动情况
ROV横移运动的流场采用长方体计算区域,沿ROV纵向取6倍体长,左右两侧取12倍体长,上下两侧取10倍体长。以Y轴正方向为水流方向,设置流场左侧为流量入口,流场右侧为流量出口,其他均设置为壁面,采用结构化网格划分,网格数量为1913237,网格质量均在0.25以上。
2.3 升沉运动情况
在升沉运动情况下,采用长方体计算区域,沿ROV纵向取6倍体长,左右两侧取8倍体长,上下两侧20取倍体长。以Z轴正方向为水流方向,设置流场上侧为流量入口,流场下侧为流量出口,其他均设置为壁面,采用结构化网格划分,网格数量为5880317.网格质量均在0.25以上。
3 计算结果
3.1 直航运动情况
在直航运动情况中,ROV以2m/s的速度运动时,压力与速度云图如图2、图3所示,此时的入口质量流量为22993.92kg/s。

图2 压力云图
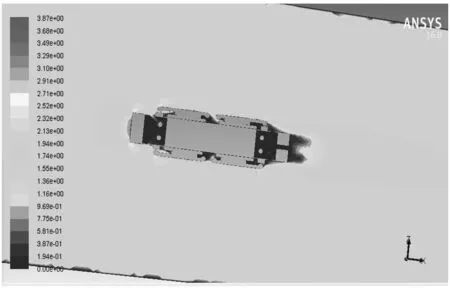
图3 速度云图
取速度分别为0.5、1.0、1.5、2.0、2.5、3.0、3.5、4.0、4.5、5.0knot,不改变其他条件,通过设置入口处质量流量,得到每个速度下的粘性阻力,绘制成曲线,并且根据阻力系数计算公式,绘制对应的阻力系数曲线,如图4所示。

图4 ROV在直航运动情况下的阻力曲线与阻力系数曲线
3.2 横移运动情况
在横移运动情况中,ROV以2m/s的速度运动时,流场入口质量流量为143712kg/s。按照以上方式绘制曲线,如图5所示。

图5 ROV在横移运动情况下的阻力曲线与阻力系数曲线
3.3 升沉运动情况
在升沉运动情况中,按照上述方式绘制阻力曲线与阻力系数曲线,如图6所示。
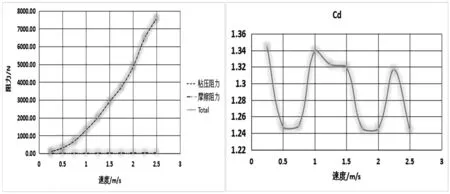
图6 ROV在升沉运动情况下的阻力曲线与阻力系数曲线
ROV所受的流体阻力中,以粘压阻力为主。在ROV直航、横移、升沉运动情况中,静压主要分布在运动前端,并且沿纵轴线对称分布。当速度一定时,ROV受力面积越大,阻力会明显地增大;当受力面积一定的时候,ROV受力随速度的增长呈现抛物线式的增长,但是阻力系数却呈现一个下降的趋势。从ROV直航、横移、升沉三种运动方式的阻力系数曲线可以看出,阻力系数随速度增大并不是严格单调递减的,在某一些点会出现一些波动,但是整体是一个下降的趋势。
