基于Cult3D的大坝工程施工图像智能配准方法
2021-09-27李宁霄
李宁霄
(辽宁省河库管理服务中心(辽宁省水文局),沈阳 110003)
0 引 言
大坝工程施工在整体建设过程中尤为重要,为了保证施工图像在建设规划过程中大坝工程施工的科学性,需要将施工图像进行智能配准。在同一施工场景下拍摄得到的不同角度的图像,对其进行几何与光度方面的校正,称为图像配准,配准的准确率直接关系着大坝工程施工的质量。
传统的图像智能配准方法中,主要是针对近距离拍摄的图像有着较好的配准精度[1-2]。但是对于大坝工程施工来说,得到的施工图像一般为远距离探测技术所得到的遥感图像。遥感图像与普通图像相比,每个像素点中所包含的信息量都较大,因此在同一场景下不同角度的遥感图像每个像素点中所对应的大坝工程施工信息都会有一定偏差,对于大坝工程施工遥感图像的配准过程来说,特征点的选择与配准是非常重要的。传统的配准方法中,对于近景图像的配准取得了较好的效果,但是对于大坝施工的遥感图像来说,配准性能有所降低。因此,本文提出一种基于Cult3D的图像智能配准方法,以应用于大坝工程施工中。
1 基于Cult3D的大坝工程施工图像智能配准方法研究
1.1 基于Cult3D创建三维模型
在大坝工程施工的图像配准过程中,配准平台中的设计需要体现出以大坝工程为主体的图像配准思想,在建模过程中要方便施工参照。因此本文在模块化基础上,构建基于Cult3D技术的三维模型配准平台[3]。该平台需要包括大坝施工中的土工试验项目,在建模过程中使用者可以利用PC机的外部硬件交互操作,对基于遥感图像的大坝施工三维模型进行创建和调整。在建模过程中,主要使用Cult3D技术来完成模型的交互和拼接。Cult3D技术是目前使用频率较高且性能较好的VR交互工具,其自身具有较好的交互性能,使用过程中能够为配准节省网络带宽,提高配准效率[4]。在建模过程中,PC外设能够相应地控制场景漫游以及基于模块结构的实验项目,包括虚拟施工场地、工程项目展厅、施工过程中的材料饱和性、含水率测定、土壤密度、颗粒分析、三轴剪切等工程项目,在Cult3D技术的基础上进行开发,其建模开发流程见图1。

图1 Cult3D的建模开发流程
在建模开发的过程中,需要在与3D模型接口之前进行相关的装配,在导出需要的格式文件之前调整相对应位置之后再进行接口。在模型建立之后需要导入到程序中,对于工程中的光线等效果进行设计,以使后期寻找特征点的过程中便于观察。至此完成基于Cult3D三维模型的创建。
1.2 特征点的标记与匹配
图像的配准主要目的是将相同场景下的不同角度图像进行融合与叠加。本文在基于Cult3D三维模型的基础上,需要对特征点进行标记和匹配。对于工程遥感图像来说,特征点一般为比较稳定的角点或是局部极值点。对于大坝施工工程来说,想要完成施工场景的重现任务,就要保证标记出来的特征点具有普适性,方便后期的匹配[5]。在标记的过程中,特征点的标记原则就是无论图片如何变化,被标记的特征点都要保证在几何、光度方面具有不变性。几何不变性主要包括图像在相机运动下发生一系列变化的条件下,平移、旋转和尺度都不会发生改变,光度则主要是指亮度[6]。计算出图像中局部像素以及与其对应的位置信息之间的关系,主要是基于局部特征自身在遥感图像场景下的独特性质[7]。但是对于相机发生复杂运动的背景下,则会受到噪声干扰。图像光度方面,需要对待配准的图像进行归一化处理,这样能够保证提升光度变化方面图像的鲁棒性。在特征点标记时,对遥感图像像素的梯度、直方图、颜色灰度等进行统计和处理。标记出的特征点需要有较高的独特性,并兼顾本身和周围的有效特征信息,保证匹配过程顺利进行。
匹配两图像之间的特征点,主要是依据两个特征点之间的相似性。参考图像以及待配准图像中各自拿出一个待匹配的特征点进行相似性度量,可以利用综合度量法实现,计算公式如下:
(1)
式中:(x,y)为图像中特征点的坐标;S为样本协方差矩阵;T为两点之间的真实距离。
计算得到特征点相似度之后,将其降序排列,完成初始匹配。此时的匹配结果比较粗糙,还需将其分类,把匹配错误的特征点剔除,最终将随机一致的采样算法作为匹配正确的匹配样本数据集。至此完成特征点的标记与匹配。
1.3 图像变换
对于大坝工程施工来说,得到的图像都是遥感图像[8-9]。获取遥感图像的相机一般搭载在无人机上,或直接利用卫星获取图像。这些相机为了拍摄到工程不同角度的图像来回进行运动,运动方式决定了图像之间会存在一定的变换关系。相机的运动可以概括为平移、旋转、垂直,图像的变换方式主要是取决于相机的运动方式。在图像变换过程中,存在一定的变换模型矩阵可以对其进行描述[9-10]:
(2)
式中:m0为相机经过运动后,得到的缩小图像与原有图像的尺寸比例;m1为相机经过运动后,得到的放大图像与原有图像的尺寸比例;m2为相机运动后,拍摄到的图像与原有图像相比,在水平方向上所产生的位移;m3、m4为发生旋转的变换量;m5为拍摄到的图像与原有图像相比,在垂直方向上所产生的位移;m6、m7为图像在产生水平和垂直位移量后,由于拍摄的角度和光度发生变化而产生的形变量;x、y为参考图像上的某点坐标;x′、y′为经过变换后的点坐标。
经过上述矩阵的计算之后,可以由原图片的坐标得到变换之后的坐标[11-13]。完成坐标计算之后,需要对图像上的图形进行变换。在图像配准中经常使用的变换形式主要有以下几种(图2):


图2 图像变换形式
在上述变换形式的总结下,结合图像变换矩阵和精细筛选过的匹配特征点[14-15],以此来增强匹配点的配准精确度。至此完成基于Cult3D的大坝工程施工图像智能配准方法的研究。
2 实 验
2.1 实验工程环境以及参数指标选择
为了验证本文设计的基于Cult 3D的大坝工程施工图像智能配准方法的配准精度,需要设计实验进行验证。在实验室中,选择8 G运行内存、2 GHz主机处理器的参数处理PC机,在这样的实验硬件环境下,对图像智能配准方法的性能进行评价。为了使评价结果更加直观,需要设置评价指标将结果进行量化。本文选择的相关评价指标主要包括特征点的重复度、配准精度、配准效率。对于特征点的重复度来说,计算公式如下:
(3)
式中:Nr为两图标记出的特征点相同的数量;N1为参考图像中标记出的特征点总数;N2为待配准图像中标记出的特征点总数。
当特征点位置发生偏差时,在配准后续处理过程中的影响不容忽视,因此计算特征点的重复度能够评价配准方法中特征点提取过程的性能优劣,特征点重复度越高说明性能越好。对于图像配准精度来说,计算公式如下:
(4)
式中:RM为最终配准结果得到的正确匹配点的对数;WM为配准过程中剔除的错误匹配点的对数。
配准效率主要依靠配准时间进行计算,配准运行时间短,就说明配准的效率高。
本文实验中使用的图像为遥感图像,其像素大小统一为500×500,主要来源于无人机以及卫星等设备,拍摄距离较远,使得各个像素点都包含了较多的信息量。为了保证本文实验结果的精确度,设置了4组实验进行两种配准方法的对比。其中一组的参考图像以及待配准图像见图3。

图3 参考图像以及待配准图像示意图
使用本文方法对特征点进行提取,结果见图4。

图4 图像特征点提取示意图
图4中的特征点提取示意图分别对应了参考图像以及待配准图像。为了体现出本文方法的性能优越性,同时使用传统方法进行配准,并对结果进行对比和分析。
2.2 特征点的重复度实验结果对比
在相同的实验条件下,经过两种方法对4组图像进行配准,过程中得到的特征点重复度见表1。
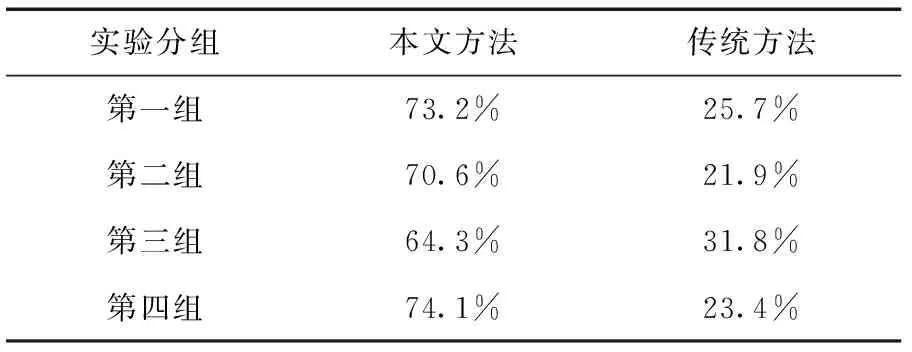
表1 特征点重复度对比
在两种方法的配准过程中,传统的配准方法会从两幅图像中提取出较多的特征点,虽然特征点的基数变大,但正确配准的数量并没有增加,因此重复度较低,这就为后续的配准过程带来一定的干扰,导致误差增大。本文设计的配准方法中的特征点数量虽然较少,但是正确匹配率较高,相对于传统方法来说,能够提高配准精度。
2.3 配准精度与效率结果对比与分析
在实验过程中,得到两种方法下的配准结果,见图5。
从图5可以看出,本文的配准结果中,匹配的点比较均匀,且几乎不存在匹配错误的特征点。但是传统方法中,在相似的区域中会存在大量相似点,对匹配造成干扰。统计实验中4组配准结果见表2。
传统的配准结果匹配点错误的数量比较多,因此需要对结果进行提纯,得到配准精度。从表2的结果可以看出,本文方法的正确匹配点数、配准精度以及配准耗时的结果都优于传统方法,说明本文设计的基于Cult3D的大坝工程施工图像智能配准方法的性能与传统方法相比,有一定的提高。
3 结 语
本文主要针对大坝工程施工图像的智能配准方法进行研究。针对传统配准方法应用在遥感图像中性能的弊端,提出一种基于Cult3D的大坝工程施工图像智能配准方法。首先创建基于Cult3D的三维模型,方便施工参照;设计Cult3D建模开发流程,完成模型的交互和拼接,明确图像中特征点标记要求并进行匹配;最后对图像进行变换,完成配准。实验结果表明,所设计的图像智能配准方法性能与原有方法相比有一定提高。