多智能体系统群集运动一致性控制分析
2021-09-26邓睿张强强肖子健李扬名
邓睿 张强强 肖子健 李扬名

摘 要:多智能体系统由于在微电网需求响应管理、无人驾驶飞行器控制、无人车控制等诸多工程领域中的应用而得到了广泛的关注。其中,多智能体系统的一致性是实现工程应用的理论基础。文章主要给出了多智能体系统的基本概述,并分析了多智能体系统群集运动的一致性控制问题。
关键词:多智能体系统;群集运动;一致性控制
0 引言
大数据技术和信息处理技术的快速发展,随着人们对信息处理的安全性、响应性等技术要求提高,分散式信息处理技术加速发展,处理此技术的中央处理系统需要具备网络实时占用消耗低、处理速度快、交换信息可靠性高等要求。近些年,多智能体系统已经成为分散式信息处理技术的重要研究对象,已吸引了人工智能、控制工程技术、计算机技术、生物工程计算、数学工程等多个领域学者的浓厚兴趣。
1 多智能体系统概述
所谓多智能体系统,是由多个独立的智能体组成,它们有相对独立的动力学演化方式,它们通过节点相互交换信息,达到融合,多个这样的智能体组成了一个复杂的系统,最后达到每个个体彼此之间都相互交流且相互协调的复杂系统。
智能体是组成多智能体系统的单独个体。在复杂系统中,每个智能体可以通过数据节点感知器相互影响,再通过反馈节点反馈数据,融合数据后再与其他智能体个体互通信息,以达到信息交互的目的。因多智能体系统具有自主性、分散性、交互性、智能性等特点,所以它能解决许多实际信息处理技术方面的问题,能通过智能体个体之间的数据通信、融合、调度来较为准确的显现实际系统的行为特性和功能。因此,在采用多智能體系统解决实际工程应用方面的问题时,需要系统具有较强的抗干扰能力、可靠性及较强的适应性。
现在,多智能体系统的研究受到许多相关学科学者的关注。多智能体系统的研究主要分为:群集运动协调性研究(如一致性、分配队列、协调性等)和全局协调性研究(如部署、搜救、探索等)两类。其中,群集运动协调性研究立足于独立智能体个体之间的动态协调及融合能力,而全局协调性研究不仅着眼于智能体个体之间的关系,还要考虑智能体个体周围信息处理的环境影响。本文主要对第一类研究,即运动协调中的群体一致性控制做出分析。
2 多智能体系统运动一致性分析
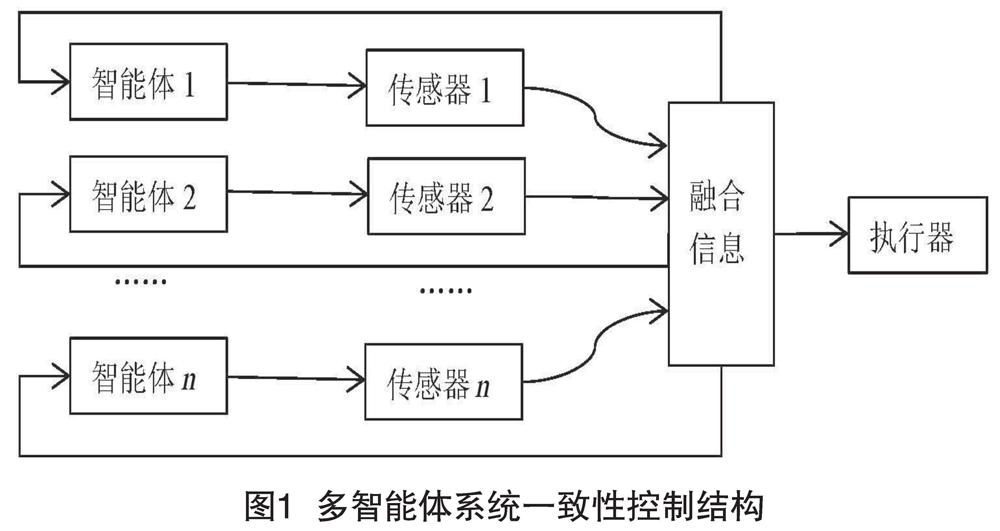
多智能体系统的一致性控制结构如图1所示,所谓运动一致性是在多智能体系统中,所有独立智能体个体通过信息处理交互点交换融合信息,不断地反馈与交换信息,最终趋向一致,由执行器控制系统运动。
当前,国内外多个学科的研究者从不同角度,通过理论、实际应用等方面对一致性问题进行了研究与探索。Ji等[1]学者研究了基于采样控制的多重二阶多智能体系统,对于相同采样时间下,设计采样控制器包含采样位置信息,证明了系统达到一致性的充分必要条件,对于不均匀采样时间,也证明了系统达到一致性的充分条件。Ji等[1]研究中的结果可以适用于采样周期间隔小的控制器,也适用于采样周期间隔较大的控制器。Wen等[2]学者分析了有向源网络中具有非线性的多智能体系统的采样控制,运用滞后输入方法,通过等价转化,用时滞系统替代采样控制器的多智能体系统,从而通过分析等价系统来确保多智能体系统达到一致性的充分条件,运用多步输入方法,等价得到多智能体系统实现一致性所容忍的最大采样间隔时间。
研究分析表明,一致性的收敛性能与多智能体系统拓扑结构的连通性密切相关。Xue等[3]学者研究了在拓扑结构不完全相同的环境下,独立智能体个体之间的位置与速度,基于事件触发采样时间的二阶连续线性多智能体系统的一致性问题。Zhu等[4]学者研究了在有向源拓扑结构下,基于事件触发采样控制的一类广义线性多智能体系统的一致性问题,他们还研究了基于事件触发采样控制的一类时滞性一阶多智能体系统的一致性问题。
其中,基于均匀采样控制的二阶多智能体系统的带领-跟随一致性问题,是一致性研究中最常用应用。它是设计了一类速度采样信息和位置采样信息的控制器,通过分析受控系统的模型,得到使二阶系统达到一致性的充分必要条件。多智能体系统中的带领者是一类特殊的智能体,带领者的运动相对独立于跟随者的智能体,跟随者通过信息交互会尽可能的跟随带领者,类似这种一致性问题通常被称为带领-跟随一致性问题。带领-跟随结构是许多生物系统中存在的主要优化形式,且加强了群体的通信和导向,如图2所示[5]。
除此之外,还有对基于事件触发通信的广义线性多智能体系统的全局带领-跟随一致性问题,此类问题基于一组“触发事件”的不均匀采样周期,研究一种带有输入饱和的多智能体系统。还有基于异步通信的离散时间多智能体系统的约束一致性问题,此类问题与之前提到的研究不同的是,引入“约束一致性”概念,所谓约束一致性,是在多智能体系统中,基于一个凸约束集,引入投影算子研究一种状态约束型非线性系统,处理异步通信条件下的问题。
这些研究都是使得多智能体系统更优化,能更多指导多智能体系统在实际工程中的应用。总之,多智能体系统的一致性控制问题研究在多人造卫星的控制、多智能水下探测器的控制、无人驾驶器的控制等多个领域中有广泛的应用且备受关注。因多智能体系统的一致性问题作为实际工程应用的基础更是初级研究的热门话题。多智能体系统的一致性控制问题数学模型分析较简单,因此采用的研究方法比较多样化。本论文仅针对多智能体系统一致性问题中的一小部分结构进行了分析,且仅就本文所分析的内容,仍有更多、更深需要探讨的空间进行拓展性研究,这些内容将会是未来这方面研究的一类挑战性课题。
[参考文献]
[1]JI L H,LIU Q,LIAO X F.On reaching group consensus for linearly coupled multi-agent networks[J].Information Sicences,2014(287):1-12.
[2]WEN G H,DUAN Z S,YU W W,et al.Consensus of multi-agent systems with nonlinear dynamics and sampled-data information: a delayedinput approach[J].International Journal of Robust and Nonlinear Control,2013(23):602-619.
[3]XUE D,HIRCHE S.Event-triggered consensus of heterogeneous multi-agent systems with double-integrator dynamics.IEEE Control Conference,European,2013(6): 1162-1167.
[4]ZHU W,JIANG Z P.Event-based leader-following consensus of multi-agent systems with input time delay[J].IEEE Transactions on Automatic Control,2015(60): 1362-1367.
[5]SONG Q,LIU F,CAO J D,et al.M-matrix strategies for pinning-controlled leader-following consensus in multiagent systems with nonlinear dynamics[J].IEEE Transactions on Cybernetics,2013(43):1688-1697.
(編辑 姚 鑫)
Consensus control of flocking motion in multi-agent systems
Deng Rui, Zhang Qiangqiang, Xiao Zijian, Li Yangming
(Department of Physics and Electronic Engineering, Lianyungang Normal College, Lianyungang 222061, China)
Abstract:Multi-agent systems has been widely concerned because of its application in many engineering fields, such as microgrid demand response management, unmanned aerial vehicle control, unmanned vehicle control and so on. Among them, the consensus of multi-agent systems is the theoretical basis of engineering application. In this paper, the basic overview of multi-agent systems is given, and the consensus control problems of flocking motion is analyzed in the multi-agent systems.
Key words:multi-agent systems; flocking motion; consensus control
