一种适用于风力机组复杂阵风工况的非线性控制策略
2021-09-26王瑞良徐伊丽
杨 翀,王瑞良,孙 勇,李 涛,徐伊丽
(1. 浙江运达风电股份有限公司, 杭州 310012;2. 浙江省风力发电技术重点实验室, 杭州 310012)
0 引言
随着世界各国对能源安全、生态环境、气候变化等问题的日益重视,加快发展风电产业已成为国际社会推动能源转型发展、应对全球气候变化的普遍共识和一致行动[1]。2019年,中国新增风电并网装机容量25.74 GW,其中陆上新增并网装机容量23.76 GW,优质风场基本已经被开发完,风电的开发转向低风速高湍流的风资源区[2],此类风场大都是山地复杂地形,出现极端阵风风况较多,阵风特点是风速与风向在短时间内均发生较大变化。极端阵风对机组的载荷与控制策略带来很大的挑战,短时间的大风会导致机组触发超速保护动作而停机,大大的提高了机组所受载荷。因此研究阵风控制策略,抑制或者减少风电机组超速脱网,对降低机组机械载荷、提高电网稳定性有重要的工程意义。
为了控制阵风风况对机组载荷的不利作用,行业学者们做了大量的研究。卢晓光等[3]基于激光雷达测风设计了变桨前馈阵风控制算法,对阵风附加载荷进行了有效控制。娄尧林等[4]结合变速变桨控制算法基本结构,通过增加转速控制环以及非线性增益因子的策略,使得机组在阵风工况下进行快速变桨动作。Stoyan Kanev和Tim van Engelen[5]通过构建非线性观测器快线监测面内外弯矩来识别极端阵风。E A Bossanyi等[6]提出借助机载式激光雷达,发现来流的阵风,通过前馈控制实现降载。曹碧生等[7]通过优化变桨PI和加入转差系数,应对大湍流的影响。Andrew Pace 等[8]设计了一种雷达辅助控制方式,在极限阵风情况下,切换到雷达辅助控制模式降低过速概率。
本文对抑制阵风工况机组过速停机问题开展研究,通过监测转速变化特性,适当增加桨距角的策略来解决,同时根据机组特性设置的触发条件控制,能有效保证正常发电工况不会触发该功能,不增加机组的疲劳载荷,并选用实际机组进行了仿真验证。
1 控制策略
1.1 极端相干阵风
阵风在山地复杂地形容易出现,其特点是在短时间内风速与风向发生大幅变化。根据IEC61400-1标准载荷计算的定义,方向变化的极端相干阵风ECD,方向变化的极端相干阵风的幅值Vcg=15 m/s。
风速变化上升时间为T=10 s,实时风速:

风速的上升与风向从0到T的变化是同步进行的,风向变化量为:

则同步的实时风向为:
图1 所示为阵风的风速风向变化时程图,可以看出在短时间内风速与风向都发生了骤变,这对风机的载荷与控制会产生很大的影响。

图1 阵风风速风向变化
1.2 超速机理
风力机组的控制主要包括转矩控制与变桨控制,风机能够在不同的转速下运行。机组运行发电控制过程可以分为4个阶段,如图2所示。

图2 变桨变速机组控制
(1)转速恒定阶段(BC)。发电机保持切入转速,通过转矩的变化,风轮的转速会保持不变直到达到最优叶尖速比。
(2)变转速运行阶段(CD)。通过改变发电机转矩来调节发电机的转速,从而保持机组在最优叶尖速比下运行。
(3)恒转速运行阶段(DE)。通过改变发电机转矩,发电机转速会被调节至额定转速直到达到额定转矩和额定功率。
(4)恒功率运行阶段(EF)。机组已经达到额定功率,通过变桨系统的气动调节来限制风轮吸收功率。
机组运行过程中遭遇阵风,此时风速急速上升,导致发电机转速急剧上升,但机组还未达到额定功率,即在图2转矩转速关系的BC段,此时变桨系统还未开始响应,而当机组达到额定功率时,由于变桨系统的滞后性以及此时转速已经很高,这时已经不能有效地抑制发电机超速。一方面是由于风轮惯性,另一方面由于桨叶回调速率较慢,使得机组的发电机转速容易超1.1倍的保护限值,导致机组超速停机。对于超速执行快速停机的情况,由于剧烈的停机导致的推力和风轮不对称载荷会变得非常高,对于部分DLC1.4 工况(阵风工况)而言,停机与否可能引起极限载荷一个数量级的变化。

表1 更新
2 非线性控制策略
针对DLC1.4 工况设置中存在的风速和风向骤变情况,采取非线性控制策略改善机组超速停机情况,下面称为风轮面动态推力削减功能。该方法通过探测到发电机转速的急剧变化,采取在适当时刻叠加非线性桨距角的策略,抑制机组阵风工况的超速停机。在本非线性控制策略中,通过监测实时的发电机转速变化特征值(转速误差乘以转速误差的变化率),即桨滤波后的发电机转速乘以其导数超过动态推力削减转速参考阈值时,且同时发电机转矩超过一定阈值时,在传统PI 控制的基础上额外叠加一个桨距角命令,快速削减风轮面推力,避免关键部件在过速停机中出现极限载荷。
对于DLC1.2正常发电工况,由于引入了风轮面动态推力削减方法,如果风轮面动态推力削减阈值设计不合理容易造成正常发电工况也触发该功能,导致桨距角发生间断性的突变,造成机组疲劳载荷的增大,如图3所示。
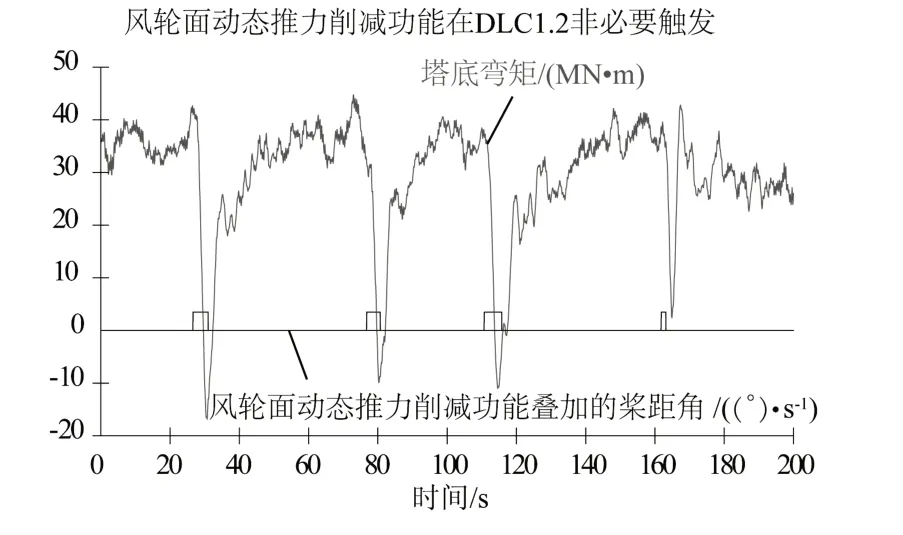
图3 DLC1.2工况下风轮面动态推力削减触发
对于动态推力削减转速参考阈值使用了一个非对称滑动滤波器用来快速跟随增加的变桨动作,同时在桨距角快速下降时引入了衰减特性。这使得当风机经历极限阵风时,非线性特征尽可能容易地被激活,且尽量避免风机处于正常发电的情况下本特征被激活。
3 实例分析
采用风力机组仿真如今Bladed 对该策略进行仿真验证,仿真模型为某4.8 MW 双馈机组,风轮直径156 m,额定转速为1750 r/min,根据IEC 规范工况设置,对DLC1.2 与DLC1.4正常发电与阵风工况开展仿真验证,比较非线性控制策略应用效果,从机组的桨距角、转速等运行参数以及极限载荷特性几方面进行对比研究。
3.1 载荷验证
图4 所示为DLC1.4 某子工况的桨距角与转速时序,可以看出采用非线性控制策略后阵风工况机组避免了超速停机,在风速快速上升的时候,检测到转速急速上升,变桨系统进行了提前变桨。图5所示为机组载荷响应,机组的塔底弯矩下降了一个量级,验证了该非线性控制策略的有效性。
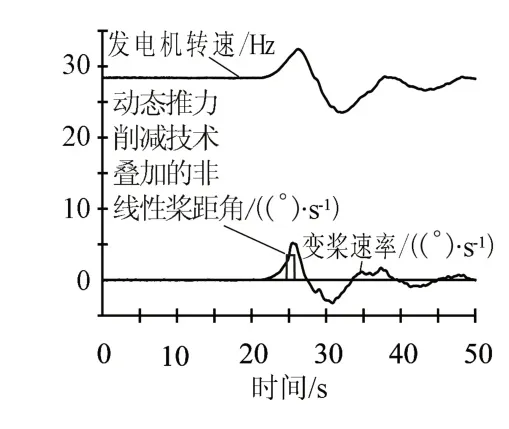
图4 动态推力削减功能过速抑制效果

图5 动态推力削减功能降载效果
3.2 触发条件
为了保证在DLC1.2 工况不触发风轮面动态推力削减功能,对动态推力削减转速参考阈值进行规划,图6 所示为DLC1.2工况所有桨距角对应动态推力削减转速参考阈值的散点图,在桨距角较小阶段,初设的动态推力削减转速参考阈值偏低,可能会导致DLC1.2部分工况不必要的触发风轮面动态推力削减功能,现在采取新的包络动态推力削减转速参考阈值,提高在小桨距角阶段的阈值,来实现风轮面动态推力削减功能的合理触发,如图7所示。

图6 优化前的DLC1.2 工况的散点图
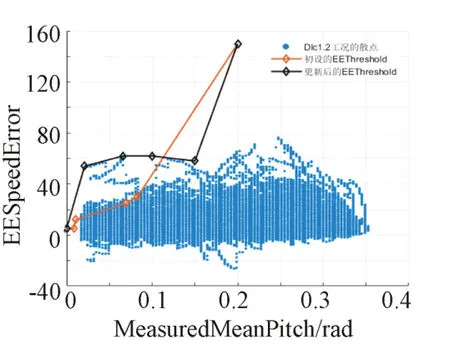
图7 优化后的DLC1.2 工况的散点图
通过提升小桨距角段的阈值,在更新动态推力削减转速参考阈值后,避免了DLC1.2 工况中的动态推力削减功能触发。从图8~9 中可见,在避免不必要的EEdot 触发之后,对于DLC1.2-gb3 工况中塔底My 载荷的疲劳和极限值都获得了一定优化。
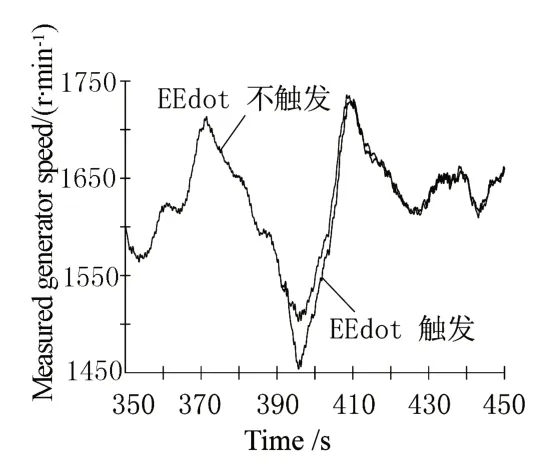
图8 DLC1.2-gb3工况转速时序
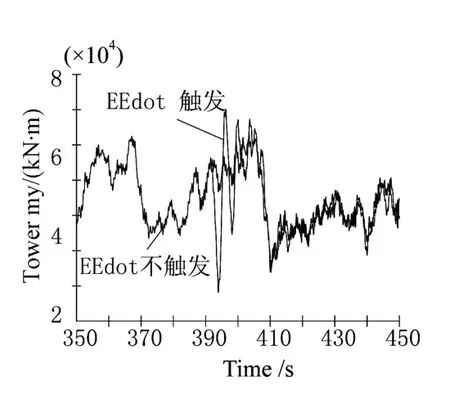
图9 DLC1.2-gb3工况塔底My时序
同时,对比更新前后DLC1.4中触发动态推力削减功能的工况统计情况,表3 所示为更新前后DLC1.4 中动态推力削减功能不受影响。

表3 更新前后DLC1.4中触发动态推力削减功能工况统计
4 结束语
本文针对极端阵风工况机组出现过速停机,造成机组载荷增大的问题,设置一个以减少超速为目的非线性变桨控制策略,在阵风工况抑制了机组的过速停机,通过实际机组仿真结果分析,验证了该策略能够有效解决极端阵风工况机组超速停机问题,降低了风电机组塔底的载荷,提高运行的稳定性。
通过对控制策略触发阈值的有效设置,在阵风工况抑制机组过速停机的同时,保证正常发电工况不触发该功能,避免出现转速振荡导致机组疲劳载荷增大的风险,且不影响本功能在极端阵风工况中的正常触发。
