电动商用车的串联制动控制策略
2021-09-26邝家凯刘贻华
邝家凯,刘贻华
(广东理工学院, 广东肇庆 526100)
0 引言
近年来,电动化已成为国内外汽车发展的主流方向,商用车领域也逐渐向电动化转型。在电动汽车行驶过程中,可将制动时对电机的反作用能量回收到特定的储能装置里面,进一步利用能量,提高车辆的续航里程[1-3]。但目前再生制动技术主要应用于乘用车领域,商用车方面的应用还相对较少。
张小龙等[4]根据ECE 制动法规以及制动稳定性的有关要求,优化车辆的制动力分配,提高了车辆的制动能量回收效率;王琳琳[5]设计了一种前轮电子制动、后轮液压制动的制动控制系统,对混合动力汽车的再生制动能量进行再次利用,可改善车辆的经济性;卢珊等[6]通过建立再生制动模型,在ADVISOR 平台中进行能量回收效率仿真;杨小龙等[7]以良好制动性和能量回收率最大化为目标,针对某前驱纯电动汽车提出了基于多因素输入模糊控制的再生制动策略;倪计民等[8]在考虑能量回收效率、汽车驱动形式、驱动强度和车辆重心位置的基础上,提出并研究了最大效率再生制动能量回收策略;王永红等[9]针对串并联再生制动能量回收的数学模型进行了研究。龚贤武等[10]基于制动稳定性要求和ECE 制动法规对某电动轿车制动力分配进行研究,在保证制动稳定性的同时,大大提升了制动能量回收效率。
本文以电动商用车为研究对象,该类商用车具有气压和再生制动2种制动方式,设计了制动舒适性强、能量回收率高的串联制动控制策略,并基于建模和联合仿真对制动性能进行验证分析,可为商用车的串联制动控制提供参考借鉴。
1 设置串联制动约束条件
1.1 ECE法规对制动力分配要求
汽车制动时的前后轴制动力分配结果将对制动稳定性和附着条件的利用产生显著影响,一般有前轮先抱死拖滑、后轮抱死拖滑以及前后轮同时抱死拖滑3种工况,根据汽车动力学理论可知,当前后轮同时抱死拖滑为理想工况,其前后轮的制动力分配曲线称为I曲线,如式(1)所示[11-12]。

式中:Fbf和Fbr分别为质心到前、后轴的距离;z为制动强度;hg为质心高度。
根据车辆所要满足的制动效能,车辆的制动力分配要符合有关法规,以后轮驱动电动商用车为例,根据ECE 法规设置如下的约束条件[13]:

1.2 电机约束
电机再生制动力矩与其发电功率和效率有关,在一定转速下,再生制动产生的最大制动力矩受电机发电能力的限制[14]。再生制动时电机的转矩输出特性为基速以下时以恒定的转矩输出,在基速以上时以恒定的功率输出。另外,为了保证制动时的安全性,避免车速过低时电机转速和再生制动力矩过小,将电机回馈制动转速阈值设置为500 r/min,一旦电机转速低于该阈值,则不进行再生制动。在制动过程中,当驱动轮需要的再生制动力超过电机所能提供的再生制动力时,还需要利用摩擦制动补充部分制动力。因此,可得如下的电机再生制动特性[15]:

式中:Pm_reg为电机再生制动功率;为电机恒定转矩;PN为电机额定功率;n为电机转速;nb为电机基速。
1.3 蓄电池约束
蓄电池的最大充电功率、 电流以及电池荷电状态(SOC)是影响再生制动能量回收的重要因素。为了延长电池使用寿命,考虑到再生制动过程充电的时间较短,一般要求蓄电池所允许的最大充电功率和最大充电电流要大于该过程中充电功率和充电电流[16]。同时,考虑到过度充电和过度放电对蓄电池寿命会有影响,需要对蓄电池的SOC 状态进行限制。 本文所采用的锂离子电池SCO 运行范围设置在30%~90% ,当SOC 值超过90% 时,不再进行再生制动。蓄电池的充电功率Pbat计算式如下:

式中:I为充电电流;R为电池内阻;UOC为开路电压,是关于电池SOC的函数。
1.4 制动舒适性约束
制动舒适感指的是驾乘人员对制动 “急” 或者 “缓” 的主观感受,人体对制动感受较为敏感,过急的制动过程会使人产生强烈的不适感,因此,制动感受也是影响车辆的制动性重要因素[17]。为了使电动商用车具有较好的制动感受,本文以车辆的减速度变化率j(车辆的冲击度)作为制动系统舒适性的评价指标,其计算公式如下:

根据冯瑶[18]的相关研究,人体在感受舒适较为舒适时所能承受的最大冲击度为10 m/s3,当超过该值时,人体感受效果不佳。当汽车按照理想的制动力分配曲线对制动力进行分配时,车辆具有最佳的制动效能,因此,车辆制动系统应尽量按照I曲线进行制动力分配。
2 串联制动控制策略
2.1 基本原理
如图1 所示,串联制动控制策略可以使再生制动力达到极限值后再启动摩擦制动,可以使车辆具有较好的制动效能。在改控制策略中,串联制动与ABS 系统集成后进行制动控制,通过对单个车轮的气压制动力进行控制,可以使车辆的总制动力达到路面附着极限。由此可见,串联制动控制策略充分利用了再生制动,具有较高的能量回收效率。

图1 串联制动系统制动力的分配
2.2 电动商用车电-气复合制动系统
在电动商用车中制动系统一般采用电-气复合制动方式,由于气压制动系统回路压力响应较慢,需要在设计电动商用车的电-气复合制动系统时,对传统的气压制动系统中增加控制阀和传感器等装置,从而实现前后管路压力的调节和电-气制动切换。如图2所示,通过电磁阀的通断,开关式调压阀能够对PWM信号进行控制,由此完成对前后管路制动气压的调节;在前后制动管路中安装有二位二通电磁阀,通过对气压管路的通断控制可以实现气压制动与再生制动的快速切换。

图2 电动商用车电-气复合制动系统
2.3 制动力分配策略
基于串联制动控制方法所增设的电机再生制动会影响车辆的前后制动力分配,需要对前后轮气压制动和电机的再生制动进行调节,以使得驾乘人员获得较好的制动感受。为了使车辆具有最佳的制动效能和制动稳定性,制动力分配曲线应当按照理想的制动力分配线I 曲线,车辆的制动距离也最短[19]。图3所示为车辆具有最佳制动感受的制动力分配曲线。

图3 串联制动控制策略的制动力分配曲线
根据车辆的制动强度,本文所设计的串联制动控制策略可以对电机制动力和机械制动力进行调整。当车辆处于轻度制动模式工况,此时车辆仅进行再生制动,制动力完全由电机输出;当车辆处于中等制动模式工况,此时气压制动与电机制动共同作用,一旦制动强度达到设定的数值,先提高前轮的气压制动力,后轮气压制动力保持为0,直到前后轮制动力分配曲线恰好与理想的I 曲线吻合时,前后轮制动力才会根据I 曲线同时增加[20-21];当制动强度超过0.7 时,车辆进行紧急制动,处于制动安全性的需求,ABS 介入工作,电机不再进行制动,但在ABS 系统的控制下,车辆的制动力分配仍符合I 曲线。图4 所示为串联制动控制流程,其主要步骤如下。

图4 最佳感觉的串联制动控制策略流程
步骤1:根据蓄电池SOC值、制动踏板的开度α、电机转速n求得蓄电池最大充电功率Pbat、总制动力矩Tb和电机最大制动功率Pm_reg。
步骤2:以电机的最大制动功率、蓄电池的最大充电功率两者中的较小值作为车辆的再生制动功率Pregen=min(Pbat,Pm_reg),由Tmmax=9550 ⋅Pregen/n可以计算出电机制动系统能够输出的实际最大制动力矩Tmmax。
步骤3:根据图3 中串联制动过程中总制动力的OA 段曲线可知,车辆制动所需的制动力小于再生制动输出的制动力时,即Tmmax>Tb时,制动力完全由电机输出,前后轮气压制动力Fhf,Fhr均保持为0。
步骤4:根据图3 串联制动过程中总制动力的AB 曲线可知,当Tmmax<Tb时,启动前轮气压制动器,后轮气压制动器不进行响应,前轮的摩擦制动力沿AB曲线持续提升,此时总制动力为电机输出的实际最大制动力与前轮摩擦制动力两者之和。
步骤5:根据图3 串联制动过程中总制动力的BGC 曲线,当Tmmax<Tb且制动力按照I曲线分配,此时后轮气压制动器开始响应,补偿电机所能提供的制动力以外的部分。此时选取I曲线上的任一点G,过G分别作x轴与y轴的垂线,其横坐标、纵坐标即是分配到前后轮的制动力,GH段为后轮的气压制动力。
步骤6:通过上述逻辑计算过程后,串联制动控制策略可对气压制动和电机制动进行调节,使得制动力分配按照理想的I曲线进行,实现制动感受最佳并且制动能量回收效率较好的目的。
2.4 串联制动控制模型
基于串联制动控制策略可以在Simulink 中建立串联制动控制模型,然后借助Cruise Interfaces 中的Matlab DLL 组件将生成的.DLL 文件与Cruise 整车模型进行连接,完成控制策略与整车模型的结合,实现Simulink与Cruise的联合仿真如图5所示。电动商用车的相关仿真参数如表1所示。
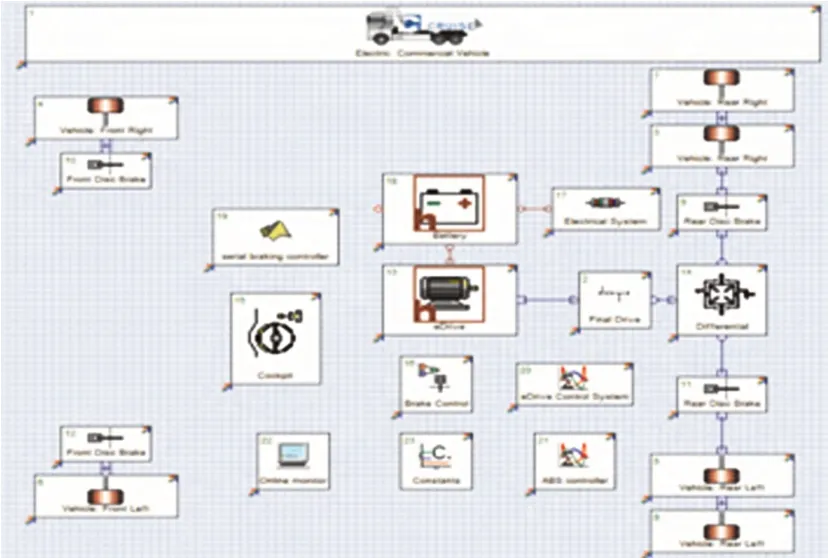
图5 串联制动控制策略联合仿真模型
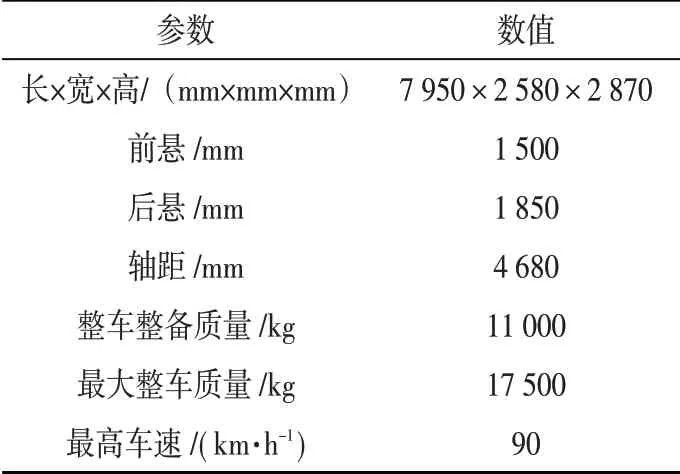
表1 电动商用车的主要仿真参数
3 仿真及结果分析
将蓄电池的初始SOC值设定为80% ,为了验证串联制动控制策略的性能,选取以60 km/h 的初速度进行制动以及NEDC循环这两种工况进行仿真试验。
3.1 以60 km/h的初速度进行制动
车辆的初速度为60 km/h 时,在制动强度分别为0.1、0.5、0.8的条件下进行串联制动控制仿真试验,并比较制动结束后的能量回收情况、车速以及蓄电池SOC 数值等关键因素。不同条件下的仿真结果如图6~10所示。
从图6和表2中可以看出,随着制动强度增大其制动所需的时间逐渐减小,符合实际制动规律。从图7可以看出,制动强度低于0.7 时,电机制动持续作用,将产生的能量回收到蓄电池中。制动结束后蓄电池的SOC 值升高。同时,随着制动强度的增加,蓄电池的SOC值变小,z=0.1时能量回收效率为25.6%,这是由于轻度制动时,电机输出全部的制动力,回收的制动能量更多;当z=0.8时,车辆进行紧急制动,处于制动安全性的考虑,电机不进行工作,ABS 开始介入,蓄电池SOC 值减小。由图8 和表2 可以看出,当z=0.1 时,蓄电池的回收能量为431 kJ,能量回收率为19.4% ;当z=0.5 时,蓄电池回收能量为386 kJ,能量回收率为17.5%。由此可知,车辆的能量利用率有所提升,其经济性有一定的改善。由图9 可知,当z=0.5时,电机制动和气压制动同时工作,在引入电机制动后,改善了气压制动迟滞时间长的弊端,提高了车辆的制动效能。从图10 可知看出,在3 种制动强度下,车辆的制动减速度变化率均不超过10 m/s3,车辆的冲击度处于较低的范围内,可以改善制动感受,提升制动舒适性。
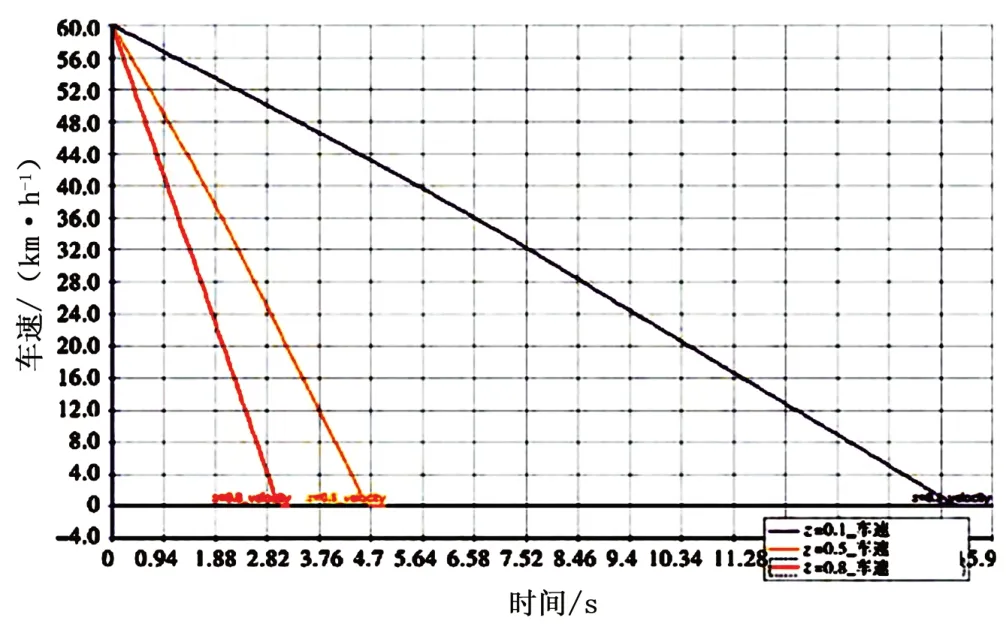
图6 不同制动强度时的车速比较

图7 不同制动强度时的蓄电池SOC比较

图8 不同制动强度时的回收能量比较
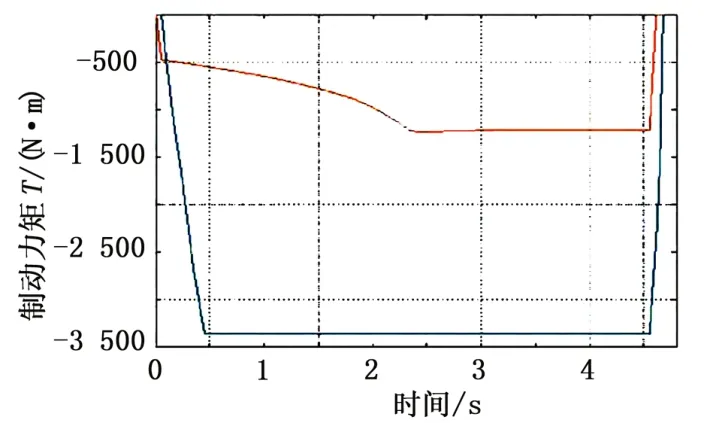
图9 z=0.5时电机制动力矩与气压制动力矩情况
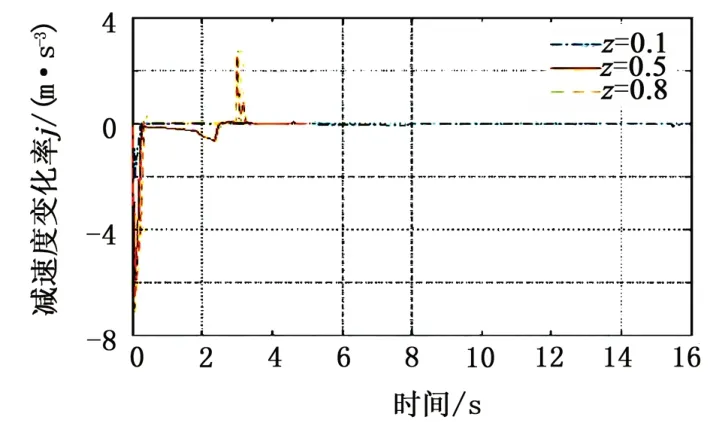
图10 不同制动强度时的车辆减速度变化率比较

表2 不同制动强度下串联制动性能仿真情况
3.2 NEDC循环工况的仿真结果分析
为了验证所提出的串联制动控制策略有效性,设定蓄电池初始SOC 为80% ,采用NEDC 循环工况进行仿真测试,比较串联制动控制策略与无能量回收机制策略的仿真试验效果。
从图11 可以看出,NEDC 工况中实际车速能够很好的跟随期望车速,因此,串联制动控制策略可满足NEDC 循环工况要求。从图12中可以看出,采用串联制动控制策略进行控制时,车辆减速过程中蓄电池电流为正,说明电机通过再生制动为蓄电池充电。采用无制动能量回收策略时,蓄电池电流为负,说明没有电流反馈给蓄电池。采用串联制动控制策略循环工况结束后,蓄电池的SOC值达到72%,表明可以降低蓄电池SOC 的下降率,减少电能消耗。从图13 和表3 中可以看出,采用串联制动控制策略后能量回收率可达到19% ,有效提高了能量利用率,车辆的续航里程有所增加。从图14中可以看出,车辆的减速度变化率最大值也远小于10 m/s3,车辆的冲击度处于良好范围内,制动感受较好,可以满足驾驶人员对制动感受的要求。

图11 NEDC工况下实际车速与期望车速

图12 串联制动控制策略与无能量回收控制策略的SOC和电流比较

图13 串联制动控制策略与无能量回收策略的能量回收情况比较

图14 NEDC工况车辆减速度变化率

表3 NEDC工况下两种控制策略的性能比较
4 结束语
本文对电动商用车的制动控制策略进行研究,基于电动商用车电—气复合制动方式,施加蓄电池、电机、制动感受等重要约束条件,设计了一种串联制动控制策略。为了使车辆具有最佳的制动感受和制动能量回收效率,基于Cruise 和Simulink联合仿真环境搭建了串联制动策略控制模型,进行了相关仿真测试,验证了串联制动控制策略的有效性,得出如下结论。
(1)在以60 km/h 初始车速制动和NEDC 循环两种工况下,通过采用本文所设计串联制动控制策略,可以对车辆的制动力分配进行优化,车辆的制动冲击度较小,车辆具有最佳的制动感受。
(2)在以60 km/h 初始车速制动和NEDC 循环两种工况下,基于串联制动控制策略,电动商用车的制动能量回收效果较好,提高了能量利用率,可以进一步改善电动商用车的经济性。
(3)在串联制动控制策略中,电机制动产生的制动力与摩擦制动方式具有不同的特性,如何利用电子控制算法对电机的制动力进行精确调节将是下一步的重点研究方向。
