非对称模糊控制算法在MPPT中的应用
2021-09-26张丽英
张丽英
黑龙江工商学院,黑龙江 哈尔滨 150025
0 引言
目前,光伏发电在国内外已经取得了长足的发展,但仍存在一些问题亟待解决,主要包括降低生产成本、提高光伏电池的光电转换效率、提高光伏系统的工作效率[1]。文章主要就提高光伏系统的工作效率方面,在分析光伏发电原理基础上对其应用系统的优化控制进行研究,利用非对称模糊控制实现最大功率点跟踪(MPPT),使光伏电池时刻保持最大功率输出。文章研究不仅实现了模糊控制对光伏电池最大功率点的跟踪,而且针对光伏电池的非对称特性,对最大功率点两侧建立独立的输入变量,实现了非对称的模糊MPPT,并实现了对模糊控制的优化和改善,进一步提高了控制的精度和跟踪速度。
1 非对称模糊MPPT仿真模型搭建
根据不同环境下的光照建立一个搜索MPPT的Simulink仿真电路模型,主要包括光伏阵列、Boost电路、非对称模糊控制模块、脉宽调制(PWM)模块、负载等,其结构如图1所示。

图1 MPPT系统仿真模型
在整个MPPT系统仿真模型中,三个太阳能光伏电池模块从外界接收光照,利用非对称模糊MPPT算法作为整个太阳能光伏系统追踪的核心元件进行搜索,以最快速完成最大功率追踪,降低功率损失,提高光电转换效率[2]。
1.1 PWM模块
PWM组件为脉宽发生器,输入量为控制模块所输出的占空比,经其转换为脉冲信号对电路进行控制[3],其内部结构如图2所示。图2中,Out为输出,Sample 1为样本1。

图2 PWM的仿真模型
1.2 Boost电路模块
Boost电路的参数设定如下:升压电感L=150 μH,滤波电容C1=200 μF,直流母线电容C2=200 μF,负载电阻R=40 Ω。Boost电路的开关由PWM发出的脉冲信号控制,其仿真模型如图3所示。图3中,V_PV为实时电压输入,I_PV为实时电流输入,L1为电感,Diode1为二极管,Pulses为脉冲。
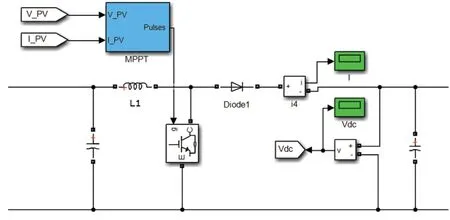
图3 Boost电路仿真模型
1.3 控制模块
控制模块采用Simulink中的S-Function模块,将编写好的程序存入m文件,等待调用。该模块的输入量为光伏阵列的电压、电流值,输出量为占空比[4],其仿真模型如图4所示。

图4 MPPT控制模块
1.4 动态光照模块
动态阴影情况下加入了Signal builder模块,将光照设置呈现动态变化,用于验证动态光照情况下该算法的追踪效果,如图5所示。图5中,Signal Builder为信号创建器,Group为组,Bus为总线。

图5 Signal Builder光照模块
对光照进行动态设置,第1秒内光照强度为1 000 W/m2,第2秒内光照强度为800 W/m2,第3秒内光照强度为1 000 W/m2,变化具体设置如图6所示。
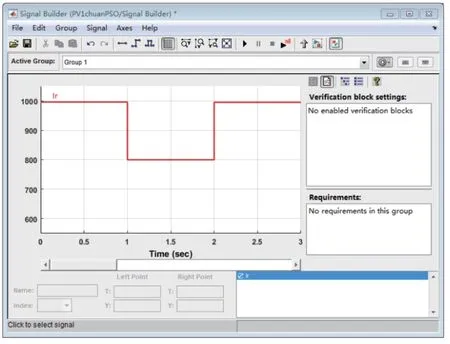
图6 光照模块内部结构
2 非对称模糊MPPT控制仿真结果分析
在温度T=25 ℃、日照为1 kW/m2的标准状态下,光伏电池的输出电压、电流和输出功率的波形如图7所示。

图7 非对称模糊MPPT控制输出仿真图
对称与非对称模糊MPPT仿真输出比较如图8所示。由图8可以看出,光伏电池输出曲线相对对称模糊控制的响应速度更快。
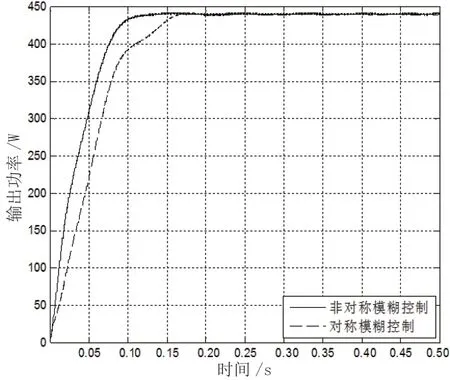
图8 对称与非对称模糊MPPT仿真输出比较
当系统所受日照不变,温度由25 ℃上升到30 ℃时,光伏电池的输出电压、电流、功率波形如图9所示。
由图9可以看出,非对称模糊控制算法能够很好地适应温度的变化,快速跟踪到最大功率点,对输出电压进行及时调节[5-6]。
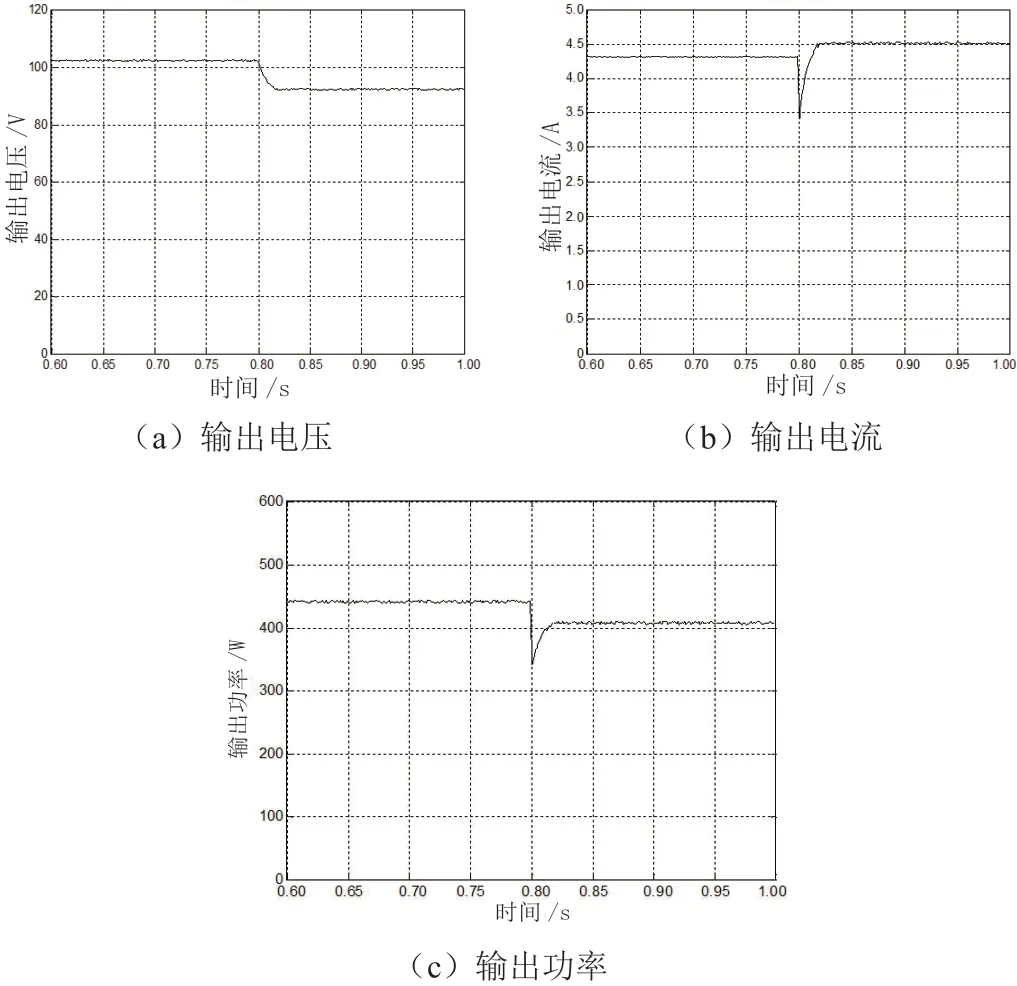
图9 温度变化时光伏电池输出
当系统所受温度不变,日照由1 kW/m2上升到1.25 kW/m2时,光伏电池的输出电压、电流、功率波形如图10所示。
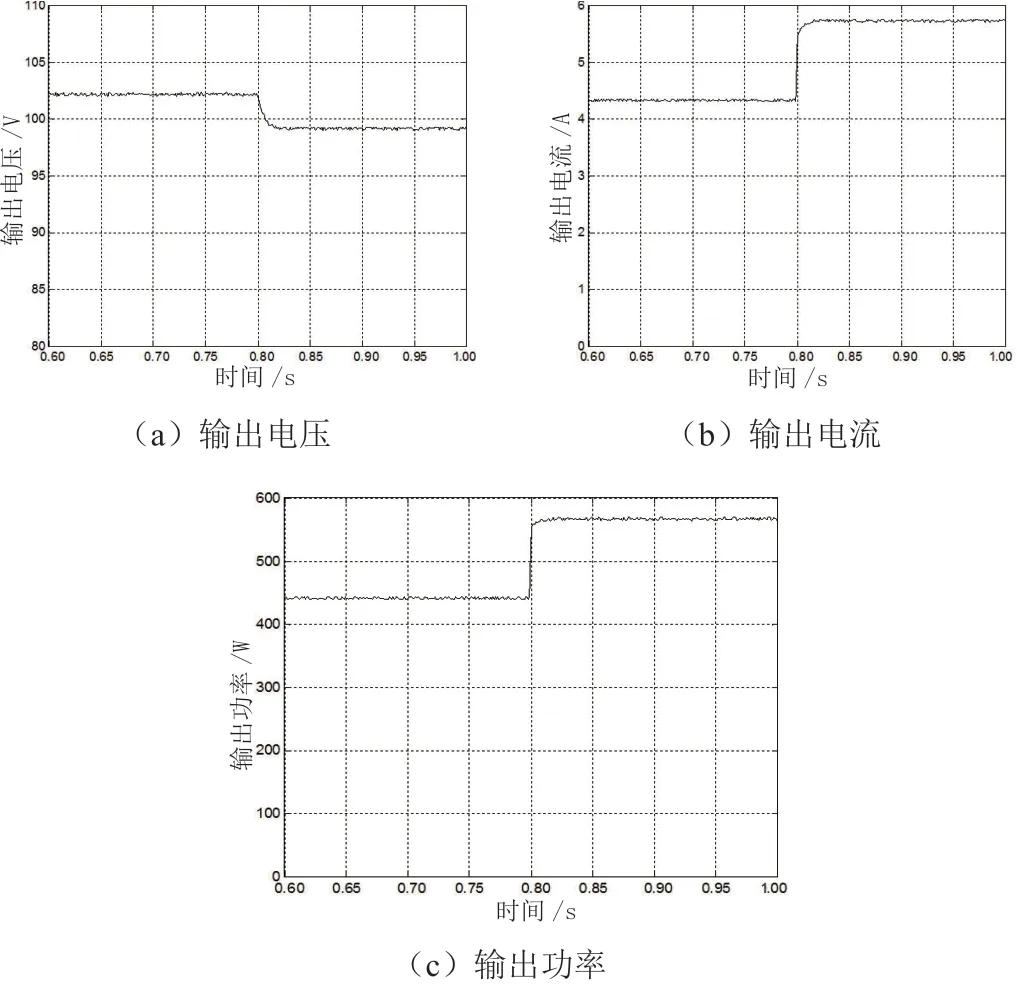
图10 日照变化时光伏电池输出
同样,当日照强度变化时,非对称模糊控制算法也能很好地适应其变化,实现对最大功率点的跟踪。
通过利用电导增量法和模糊控制对MPPT控制进行仿真,从仿真结果可以看出:(1)电导增量法会使输出电压、电流在最大功率点附近扰动,从而使输出功率在最大功率点值以下不断振荡;(2)对称模糊控制算法能够克服传统算法的弊端,减小输出电压、电流的扰动,使工作点稳定在最大功率点处;(3)非对称模糊控制能够改善对称模糊控制不能反映最大功率点两侧区间不对称的特性,进一步提高对最大功率点的跟踪速度,同时对日照和温度的变化都能表现出很好的性能。
3 非对称模糊MPPT试验平台设计与结果分析
根据上述的非对称模糊控制MPPT算法,在数字信号处理器(DSP)平台上开发研制了一台3 kW单相光伏并网逆变器,将采用的算法加载在并网逆变器的直流侧。DSP在整个电路中起着控制核心的作用,因而其选型影响整个装置的性能。
如图11所示,系统的整体硬件结构主要包括以下模块:(1)主控电路,采用DSP控制器监控系统的运行;(2)逆变主电路,采用全桥逆变电路将电池板的直流电压转换为与电网电压同频同相的交流电流并入电网;(3)信号调理电路,将待测的各种信号经过调理后输入DSP内部的A/D模块;(4)供电模块,将电池板的直流电压经过DC-DC转换提供整个控制系统的工作电源;(5)存储电路,采用I2C接口的E2PROM AT24LC512存储并网逆变器的历史工作数据,以便将来查询;(6)显示及报警电路,采用LCD结合LED的显示方式,LCD的优点是显示的信息量大、内容丰富,并且功耗小,但是只适合在近距离使用,因此在该系统中配合3个不同颜色的LED来进行显示和报警,方便直观了解系统的运行状态;(7)通信电路,提供RS232、CAN总线通信接口,可以通过上位机软件方便地设定运行参数,监控系统的运行状态。

图11 系统整体结构框图
单相光伏并网逆变器的主电路如图12所示,开关管分别为VT1~VT4。

图12 单相光伏并网逆变器主电路图
开关管驱动波形为正弦脉宽调制(SPWM)信号。通过样机试验,上下桥臂两开关管VT1、VT2驱动波形如图13所示,VT1、VT2的PWM波形分别为PWM1和PWM2。试验波形符合设计原理,即VT1、VT2不能同时导通,且当VT1为方向臂时,VT2同为方向臂;当VT1为斩波臂时,VT2同为斩波臂。

图13 VT1、VT2开关管驱动信号波形图
开关管VT1、VT4驱动波形如图14所示,VT1和VT4的PWM波形分别为PWM1和PWM4。试验波形说明,当VT1为方向臂时,VT4必为斩波臂;当VT4为方向臂时,VT1则为斩波臂。
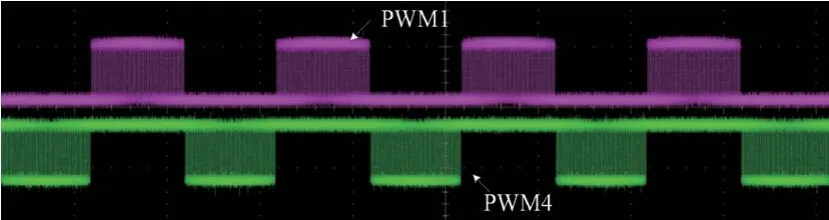
图14 VT1、VT4开关管驱动信号波形图
为防止上下桥臂开关管直通,需要设置死区时间。死区波形如图15所示。由图15可见,死区时间约为2.3 μs时,可以避免同桥臂短路现象的发生。

图15 上下桥臂开关管死区波形图
电网电压与DSP捕获口所捕获的方波试验波形如图16所示,主要是为实现与电网电压同步的功能。由于所捕获的方波信号与电网电压同相位,因此通过捕捉方波信号的上升沿并触发中断,便可得到电网电压的过零点,从而实现与电网电压同步的功能。
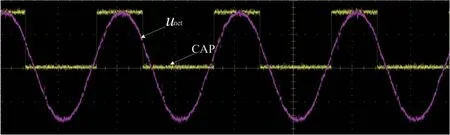
图16 捕获波形图
单相光伏并网逆变系统的建模仿真与样机试验表明,该系统的软硬件设计合理,控制策略正确,可以实现单相光伏并网逆变器输出的并网电流与电网电压同频同相,即成功实现单位功率因数下的并网。
4 结论
文章研究了可调度式光伏并网发电系统,为了更加有效地提高其发电效率以及蓄电池电能的有效利用率,延长蓄电池的寿命,实现了基于模糊控制的MPPT。在此基础上进行改进,建立了非对称模糊控制的MPPT,该方法较传统方法能进一步提高发电效率[7-10]。
(1)文章实现了基于模糊控制的MPPT,并根据光伏电池在最大功率点两侧的非对称特性,在模糊控制的基础上进行改进,实现了非对称的模糊MPPT控制。通过搭建光伏电池板的直流跟踪仿真模型,表明非对称模糊控制的速度更快,而较传统的MPPT算法,非对称模糊控制在速度和精度方面都有更好的性能。
(2)通过将文章采用的非对称性模糊控制MPPT控制算法加载到单相并网逆变器中,表明该算法能够有效抑制直流侧电压的波动,稳定直流侧电压,经过并网逆变器的网侧电压和电流正弦度高,并能实现单位功率因数并网。
