基于显著图融合的高分四号卫星光学遥感图像多运动舰船检测方法*
2021-09-26王晓辉胡玉新吕鹏
王晓辉,胡玉新,吕鹏
(1 中国科学院大学,北京 100049;2 中国科学院空天信息创新研究院 中国科学院空间信息处理与应用系统技术重点实验室,北京 100094)( 2019年11月14日收稿; 2020年2月17日收修改稿)
高分四号(GF-4)卫星是中国2015年发射的一颗地球静止轨道对地观测遥感卫星,作为目前世界上分辨率最高的地球同步轨道光学遥感卫星,GF-4卫星光学相机星下点空间分辨率优于50 m,具有空间分辨率高、时间分辨率高、覆盖范围广等特点[1-2]。基于上述优点,可以利用GF-4卫星对海上运动舰船目标进行连续、近实时检测,获取其行驶航迹,这对海洋船舶管理、渔业安全监督和打击海洋犯罪等方面具有重要意义[3]。
然而,由于大型舰船涂装颜色通常较暗,尽管GF-4卫星遥感图像的分辨率为50 m,但是在GF-4卫星遥感图像中仍然无法看到舰船本身,只能看到舰船在运动过程中形成的尾迹。因此,利用GF-4卫星遥感图像进行舰船检测实际上是对海上舰船在运动过程中形成的尾迹进行检测。目前,主流的光学遥感图像目标检测算法主要有:基于灰度统计特征的检测方法、基于深度学习的检测方法和基于视觉注意机制的检测方法等。基于灰度统计特征的方法[4-7]利用舰船或其尾迹灰度明显大于海面灰度的特点进行检测,但是该方法容易受到云的干扰,造成虚警或漏检,因此并不适用;基于深度学习的目标检测方法[8-10]通过提取目标的纹理和几何特征进行检测,但是GF-4卫星图像中舰船尾迹的纹理和几何特征很少,且会随舰船运动速度、方向和风力、风向不断变化,因此并不适用;基于视觉注意机制的方法[11-18]将人类视觉系统聚焦感兴趣区域的机理应用于图像的感兴趣区域(region of interest, ROI)提取中,该方法通过视觉显著性模型提取视觉显著图,再对显著图中的显著区域进行筛选提取ROI。由于视觉注意模型对图像分辨率没有太高要求,可以对非显著区域进行大面积过滤,因此比较适合对GF-4卫星图像进行舰船检测。
基于上述分析,本文提出一种基于显著图融合的GF-4卫星多运动舰船检测方法。随后章节安排如下:第1节对GF-4卫星光学遥感图像进行中值滤波去噪和非线性灰度拉伸后,利用谱残差(spectral residual, SR)方法[16]提取显著图进行舰船检测,并对算法复杂度进行分析;第2节使用SR方法、基于相位谱和幅度谱调谐的方法(phase spectrum and tuning amplitude spectrum, PTA)[17]、基于离散余弦变换(discrete cosine transform, DCT)的相位谱方法(phase spectrum of discrete cosine transform, PCT)[18]对GF-4卫星遥感图像提取显著图,进行舰船检测,并分析讨论检测结果;第3节提出一种基于显著图融合的舰船检测方法,选择SR方法的显著图为基础显著图,使用基于加权Dempster-Shafer(DS)证据理论(weighted Dempster-Shafer evidence theory, WDS)[19]的图像融合方法,将其与PCT方法、PTA方法的显著图进行融合,进一步提升舰船检测效果;第4节对全文进行总结。
1 基于SR方法的GF-4卫星光学遥感图像舰船检测方法
1.1 GF-4卫星光学遥感图像预处理
GF-4卫星运行在距地面36 000 km的地球静止轨道,其主要用途为气象、林业、农业、环保和减灾等。与云层和陆地相比,GF-4卫星图像中的舰船尾迹属于弱小目标,亮度低、面积小[20]。由于GF-4卫星相机受空间高能粒子的影响,因此图像不可避免地会受到噪声干扰。此外,随着相机使用次数的增加,坏像素点也会随之增加。若直接对GF-4卫星原始图像进行尾迹检测,一定会存在大量的虚警与漏检[21]。因此,在进行尾迹检测前,首先需要对GF-4卫星原始遥感图像进行预处理,目的主要有2个:1)减小噪声和坏像素点对尾迹检测的干扰,降低虚警;2)提高舰船尾迹灰度与海面灰度之间的比值,减少漏检。预处理过程分为2部分,分别是中值滤波去噪和非线性灰度拉伸。下面将结合GF-4卫星真实遥感图像说明预处理的过程和意义。
图1(a)展示的是2017年11月16日由GF-4卫星拍摄的真实图像,为便于观察舰船尾迹及其周边环境,我们在原始图像中选取50 km×50 km(1 000 pixel×1 000 pixel)作为关注区域,图中2个白框内分别有2艘运动舰船的尾迹,可是肉眼几乎无法看出。图1(b)是图1(a)的三维视图,从图中可以看出:1)在(245, 448)处存在1个坏像素点,灰度值很高;2)图像中存在密卷云[22],云的灰度值较高,形状非常复杂;3)2个运动舰船的尾迹分别位于(713, 130)和(944, 292),其灰度值都小于云的灰度值,如(182, 623)。图1(c)展示的是图1(a)中(944, 292)处目标放大后的效果,从图中可以看出,即使进行了局部放大,也很难观察到尾迹的存在。

图1 GF-4遥感图像、三维视图和尾迹放大图像Fig.1 GF-4 remote sensing images, 3D images, and enlarged wake images
图像增强常用方法有:灰度变换、直方图增强和平滑滤波等。理论上,只要参数设置合适,这些方法都可以用于GF-4卫星图像增强,达到图像中尾迹灰度值与海面灰度值比值提高的目的。本文使用一种非线性灰度拉伸方法,可以自适应地对图像进行拉伸,压缩灰度级较高的云层与较低的海面背景,能够达到更好的图像增强效果。设GF-4卫星原始遥感图像为G(x,y),首先对其进行中值滤波:
I(x,y)=M(G(x,y)).
(1)
其中:M(·)表示中值滤波过程,I(x,y)为中值滤波后的图像。通常情况下,原始图像中舰船尾迹占十几个像素,坏像素点导致的噪声占1~4个像素,因此本文中中值滤波器卷积核大小均设置为3×3。然后,对I(x,y)进行非线性灰度拉伸:
(2)
其中:m是降噪处理后图像I(x,y)的灰度均值,E是拉伸曲线斜率,eps是一极小值,目的是防止当I(x,y)=0时公式无意义。由式(2),经作者对所掌握的GF-4卫星多场景下的遥感图像进行分析,E的取值范围设为[6,8]较为合适。
图1(d)展示的是图1(a)经过预处理后的图像。从图中可以看出,云的细节变得清晰,白框内出现2个“白点”,这就是2艘运动舰船的尾迹。图1(e)是图1(d)的三维视图,从图中可以看出:1)坏像素点导致的噪声被明显抑制;2)云层、尾迹与海面对比度明显增强。图1(f)是图1(c)经过预处理后的图像,从图中可以看出舰船在运动过程中所形成的“纺锤状”尾迹,这让尾迹在视觉上有了可以进行显著性检测的基础。此外,从图1(f)还可以看出,该尾迹在视觉上仅占二十几个像素,且缺乏几何和纹理特征,这也说明难以使用深度学习方法在GF-4卫星遥感图像中进行尾迹检测。
1.2 基于谱残差法的显著图提取方法
视觉显著性模型利用视觉注意力机制对图像进行显著图提取,从图像全局信息中快速筛选出图像焦点,获得目标所在显著区域。视觉显著性模型主要有基于空域的显著性检测模型[11-14]和基于频域的显著性模型[15-18]:基于空域的显著性模型主要通过提取多种图像底层全局显著特征,将其融合,建立全局显著图,但如前文所述,GF-4遥感图像中舰船尾迹缺乏清晰的纹理、几何特征,灰度图像也缺乏多通道的颜色特征,因此空域模型难以应用于GF-4图像;基于频域的显著性模型脱离生物视觉机制,将图像转换至频域进行频谱处理,抑制冗余背景信息,最后转换到空域获得显著图像。在频域模型中,部分方法是与特征、类别或者其他形式的先验知识无关的,如SR方法[16]、PTA方法[17]和PCT方法[18]等。
SR方法是文献[16]提出的一种基于频域进行显著图提取的方法,该方法认为一幅图像的信息包括冗余信息与显著性信息,将冗余信息(即对数谱中的相似部分)进行滤除,只关注对数谱的差异,从而获得图像的显著性信息。SR方法首先对预处理后的遥感图像U(x,y)进行二维离散傅里叶变换,得到频域信号W(u,v)
W(u,v)=F(U(x,y))=A(u,v)e-jP(u,v).
(3)
其中:F(·)代表傅里叶变换,A(u,v)是频域信号的幅度谱,P(u,v)是相位谱。对幅度谱A(u,v)取对数
L(u,v)=log(A(u,v)).
(4)
由于对数曲线满足局部线性条件,所以用局部平均滤波器hn(u,v)对其进行平滑,获得一般的对数谱V(u,v)
V(u,v)=L(u,v)*hn(u,v).
(5)
其中:*代表卷积,hn(u,v)为n×n的均值滤波卷积核
(6)
将对数谱L(u,v)和一般对数谱V(u,v)之差定义为谱残差R(u,v)
R(u,v)=L(u,v)-V(u,v).
(7)
谱残差能够描述一幅图像中的异常区域与焦点信息,因此可以用来进行显著性目标检测。将谱残差R(u,v)和相位谱P(u,v)进行二维离散傅里叶反变换,对其取平方以消除误差,再进行高斯滤波即可重构出一幅图像,用来表示原图像中各像素的显著度:
S(x,y)=g(x,y)*F-1(R(u,v)e-jP(u,v))2.
(8)
其中:F-1(·)代表傅里叶反变换,g(x,y)为高斯滤波器,作用是提升图像的显著性效果。SR方法对图1(d)提取显著图的结果如图2(a)所示,图中2个白点即为2个尾迹的SR方法检测结果。图2(b)是图2(a)的三维视图,从图中可以看出,2个舰船尾迹所在位置的显著度明显高于图中其他区域,云层与海面都被抑制。

图2 SR方法显著图及其三维图像Fig.2 Saliency map and its 3D image using SR method
1.3 算法复杂度分析
作为评价一个目标检测方法性能的重要因素,计算复杂度是一项关键指标。因为本节方法由预处理和SR方法组成,所以计算复杂度分析也由这2部分组成。预处理部分包括中值滤波和非线性灰度拉伸,对于处理一幅尺寸为M×N的遥感图像,计算复杂度为O(MN)[23]。SR方法与2种经典的基于频域的显著性检测方法(PTA方法[17]和PCT方法[18])的计算复杂度对比如表1所示。

表1 不同显著性检测方法的计算复杂度Table 1 Computational complexity of differentsaliency detection methods
其中:α、β是PTA方法中幅度谱调谐参数,K为高斯滤波核大小。分析3种算法复杂度,可以得出以下结论:1)基于频域的视觉显著性模型复杂度主要集中在空域与频域相互转换计算;2)与SR方法相比,PTA方法通过分段的方式进行幅度谱调谐,随着调谐参数增大,计算复杂度增加;3)由于增加了幅度谱调谐的过程,所以尽管PTA方法与SR方法计算复杂度仍在同一数量级,但PTA方法的计算时间要明显增加;4)PCT方法使用DCT变换完成空域到频域的计算,虽然可以获得更优的浮点数计算结果和算法鲁棒性,但时间复杂度的数量级要远高于SR方法与PTA方法。综上所述,SR方法在计算复杂度上具有明显优势,可以更快地进行GF-4卫星遥感图像显著图提取。
2 基于SR方法的GF-4卫星光学遥感图像舰船检测方法实验及分析
为验证第1节方法的正确性和有效性,本节使用所提多运动舰船检测方法对GF-4卫星实测遥感图像进行舰船尾迹检测,并与基于PTA方法和PCT方法的多运动舰船检测方法进行对比和讨论。实验平台为64位4核Intel i7-7700HQ CPU,主频2.8 GHz,内存32 GB,操作系统为Windows 10,仿真程序平台为MATLAB 2018b。
实验使用GF-4卫星在2017年11月和2018年8月期间拍摄的3个典型场景的遥感图像,它们分别为薄云场景、密卷云场景和有岛屿场景。为方便观察舰船尾迹及其周边环境,我们从原始图像裁切50 km×50 km (1 000 pixel×1 000 pixel)的含有舰船尾迹的数据。中值滤波器卷积核尺寸为3×3,拉伸曲线斜率E=7。GF-4卫星原始图像如图3(a)~3(c)所示,图中白框内为尾迹位置,可是肉眼却无法观察到任何目标。经过预处理后图像如图3(d)~3(f)所示,从图中可以看出,图像整体变得明亮,细节变得清晰,白框内均出现“白点”,这就是舰船尾迹。

图3 GF-4卫星薄云、密卷云和有岛屿场景遥感图像Fig.3 Light clouds, cirrus clouds, and island scene remote sensing images of GF-4
PTA方法是通过傅里叶变换将图像转换到频域后,基于整体图像的幅度谱的均值mPTA设定一个显著性特征分类阈值Δ=γmPTA,其中γ为增强倍数,根据此阈值进行非线性的幅度谱调谐,提升主要显著目标的显著度,降低非显著目标的显著度,最后经傅里叶反变换得到显著图。PCT方法将图像经DCT变换后得到频域的相位谱,舍去幅度谱信息,仅将相位谱进行DCT反变换到空域获得重构图像,对重构图像进行KPCT次哈达玛乘积以突显显著图中显著度较高的像素点并抑制低显著度区域,最后进行平滑滤波,获得显著图。
为了便于对比,我们将所有显著图进行归一化处理,目标检测阈值设置为0.40,图4~图6的半透明平面代表阈值平面。3种方法的主要参数设置如下:PTA方法中均值增强倍数γ=50,幅度谱调谐参数α=3、β=0.5;PCT方法中哈达玛乘积次数KPCT=1;SR方法中均值滤波卷积核尺寸为3×3;3种方法高斯滤波的高斯核尺寸为3×3。薄云场景下3种方法显著图提取结果如图4所示,从图中可以看出:1)在当前参数设置下,3种方法均检测到全部3个尾迹目标;2)PTA方法在(540, 2)处出现了虚警;3)在该场景下,3种方法中尾迹处的显著度区别不大。

图4 薄云场景不同方法显著图的三维视图Fig.4 3D images of saliency map using different methods on light clouds image
密卷云场景下3种方法显著图提取的结果如图5所示,从图中可以看出:1)PTA方法未检测到(944, 292)处的尾迹,SR方法和PCT方法检测到了全部2个尾迹;2)对于(944, 292)处的舰船尾迹,PCT方法显著图的显著度为0.720 0,SR方法显著图的显著度为0.678 5,均远高于PTA方法的0.379 4;3)在对非显著性区域的抑制方面,选择处于厚云区域的(191, 825)点进行对比,SR方法在此点的显著度比PCT方法低17.80%,这说明SR方法对云层的抑制效果比PCT方法更明显。

图5 密卷云场景不同方法显著图三维视图Fig.5 3D images of saliency map using different methods on cirrus clouds image
有岛屿场景下3种方法显著图提取的结果如图6所示,从图中可以看出:1)通过面积特征对岛礁过滤后,PTA方法未检测到(615, 806)处的尾迹,SR方法和PCT方法检测到了全部2个尾迹;2)PTA方法在图像左侧岛屿边缘(352, 934)和(89, 500)处出现虚警;3)对位于(615, 806)的次显著尾迹而言,SR方法显著图的显著度更高,而PCT方法显著度为0.403 8,已经接近检测阈值,PTA方法显著度为0.330 9,低于检测阈值;4)对于背景区域,以(352, 934)为例,PTA方法和PCT方法显著图的显著度分别为0.454 2和0.361 2,均高于SR方法的0.333 9,这说明SR方法对岛屿边缘的背景抑制更明显。
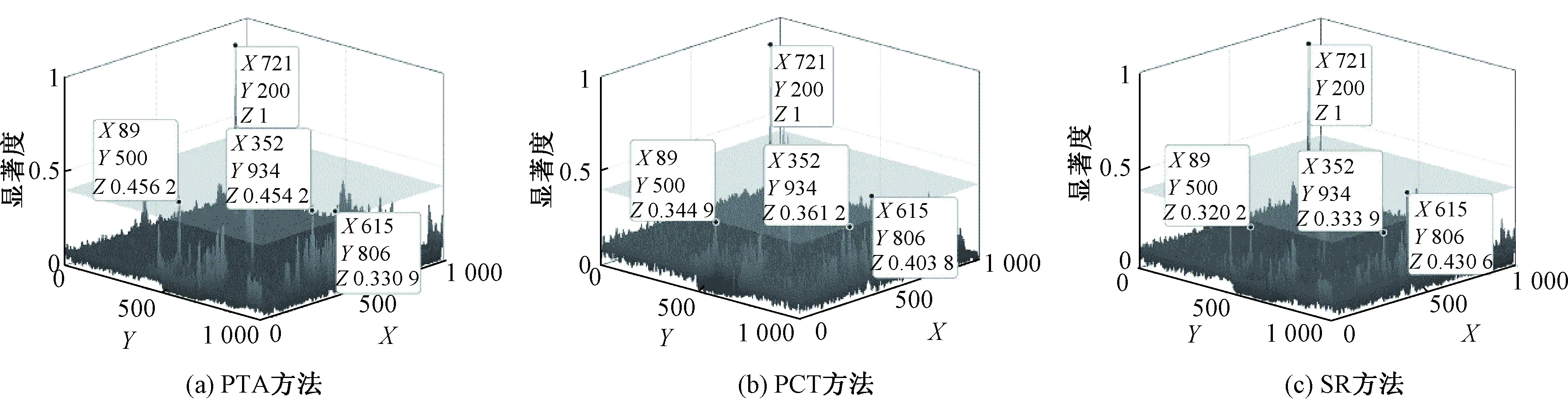
图6 有岛屿场景不同方法显著图三维视图Fig.6 3D images of saliency map using different methods on island scene image
我们对3个场景的各28帧图像序列进行尾迹检测。通过人工判读,得到3个场景中真实尾迹总数分别为:81、39和42。实验分别统计检测数、虚警数、漏检数和每帧图像处理时间,统计结果如表2所示。从表2可以看出:1)在薄云场景中,PTA方法的虚警数明显高于PCT方法与SR方法,这是由于PTA方法的分类阈值来自于整体图像幅度谱均值,但是薄云场景中的一小片毛卷云导致图像幅度谱均值变化,云的显著度被增强;2)在密卷云场景中,与PCT方法、SR方法相比,PTA方法漏检更多,这是由于该场景中幅度谱调谐的阈值分割导致次要目标显著度被降低;3)在有岛屿场景中,PCT方法的虚警数远高于PTA方法与SR方法,这是因为PCT方法损失了图像幅度谱信息,还进行了1次哈达玛乘积使显著度增强,从而导致背景区域被增强;4)在处理时间指标上,PTA方法和PCT方法均劣于SR方法,这是因为PTA方法加入幅度谱调谐,PCT方法使用DCT方法进行频域变换,导致2种方法计算复杂度更高。综上所述,SR方法在虚警数与处理时间2个指标上明显优于PCT方法,在虚警数、漏检数和处理时间3个指标上明显优于PTA方法。

表2 GF-4图像序列不同方法舰船检测结果Table 2 Ship detection results using different methods on GF-4 satellite sequential images
通过以上实验,可以得到以下结论:1)在GF-4卫星光学遥感图像多运动舰船检测问题中,PTA方法采用的分段调谐处理在密卷云场景中容易把次显著目标显著度降低,或在薄云场景中将部分背景的显著度提高,从而产生漏检和虚警;2)PCT方法在频域中舍弃了幅度谱,损失了很多灰度信息,这使得如图6(b)中(615, 806)处尾迹的显著度变低。此外,PCT方法由于使用哈达玛乘积增强显著区域,导致岛屿和厚云边缘也被增强,造成更多虚警;3)PTA方法为增强首要显著目标,在幅度谱调谐过程中加入多次判断,增加了计算复杂度,PCT方法为了算法鲁棒性使用了DCT变换,而DCT变换计算复杂度较高。综上所述,无论是检测效果还是处理速度,SR方法优于PCT方法和PTA方法。
3 基于显著图融合的GF-4卫星光学遥感图像舰船检测方法
通过第2节的实验分析可以看出,尽管SR方法提取的显著图在大多数场景下具有较好的效果,但是不同的显著性检测方法有其自身的优势。例如,PCT方法提取的显著图对整体图像边缘部分抑制较好,PTA方法提取的显著图在密卷云场景中对虚警抑制较好等。本节以SR方法提取的显著图为基础图像,结合PCT方法和PTA方法提取的显著图,利用WDS方法进行融合,获取更准确的显著图,进而得到更优的检测效果。
图像融合是是将同一场景的2幅或多幅图像信息加以综合的过程,从低级到高级可以抽象为像素级、特征级和决策级图像融合[24]。像素级图像融合技术可以最大程度保留信息,更适合显著图融合,其分为变化域方法与空间域方法。变换域的图像融合方法将原图像分解至多分辨率空间,得到多尺度的频率子带系数,在不同尺度上对子图像进行融合,然后进行重构得到最终融合图像,如文献[25]提出的基于平稳小波变换(stationary wavelet transform, SWT)的图像融合方法,可以使得图像对比度更高,信息量更丰富,但是小波变换计算复杂度较高。空间域方法根据关注的有效信息,通过制定的融合规则直接对像素点或像素块进行融合,如文献[19]提出的WDS方法,可以发挥DS证据理论在不确定事件的融合优势。传统的DS证据理论融合方法对所有证据拥有相同的权值,但是不同显著性检测方法不仅在不同场景下的效果不一,在不同像素处的可信度也不同,因此WDS方法较为适用于显著性图像融合。
本文提出一种使用WDS方法作为显著图融合方式,进行GF-4卫星光学遥感图像舰船检测的方法。首先对预处理后的GF-4遥感图像U(x,y)使用n种不同显著性检测方法(PCT方法、PTA方法和SR方法)提取显著图,对不同显著图的(x,y)处,使用加权DS证据理论计算加权质量函数值作为参考融合显著图的显著度Sal1(x,y)
(9)
其中:Crd(Qi(x,y))和Qi(x,y)分别为第i种显著性检测方法的可信度和基本概率分配。
由第2节实验可知,SR方法在多数场景下优于PCT方法和PTA方法,将其作为基础显著性检测方法,根据其前景置信度计算基础显著图Sal2(x,y)
Sal2(x,y)=Bel(Q(x,y)).
(10)
其中:Bel(·)为置信度函数。最终图像Sal(x,y)由参考融合显著图Sal1(x,y)与基础显著图Sal2(x,y)融合而成:
Sal(x,y)=μ1×Sal1(x,y)+μ2×Sal2(x,y).
(11)
其中:μ1和μ2为合成权重值。
将SR方法提取的显著图、SWT方法融合显著图与WDS方法融合显著图进行对比分析,实验使用图3薄云、密卷云和有岛屿3个典型场景的图像。根据经验,WDS方法中式(11)中合成权重值μ1=0.6,μ2=0.4;SWT方法中小波基选择为bior4.4小波,分解层数为4层。最终所有结果图像均进行归一化,目标检测阈值设置为0.40,图7~图9中的半透明平面代表阈值平面。
薄云场景下,SR方法提取的显著图、经SWT方法和WDS方法融合的显著图如图7所示,从图中可以看出:1)3种方法的显著图均检测到了3个尾迹;2)对位于(492, 509)和(896, 301)的2个舰船尾迹,SWT方法和WDS方法融合显著图的显著度均高于SR方法,它们融合了PCT方法和PTA方法在2个舰船尾迹处显著度较高的优势;3)对于图像边缘(466, 999)处,3种方法的显著度分别为:0.197 7、0.159 5和0.093 82,可以看出WDS方法融合显著图的显著度对图像边缘的抑制优于SR方法和SWT方法,融合了PCT方法对图像边缘的抑制优势。

图7 薄云场景不同融合方法显著图三维视图Fig.7 3D images of saliency map using different fusion methods on light clouds image
密卷云场景下3种方法显著图提取的结果如图8所示,从图中可以看出:1)3种方法均检测到2个尾迹,但是在(944, 292)处的尾迹,结合图5的分析,可以看出SWT方法融合过程中在此处决策倾向于PTA方法,而WDS方法倾向于PCT方法,导致在此处尾迹2种融合方法显著度变化趋势不一致,WDS方法显著度变高,而SWT方法变低;2)对于背景点(672, 965),WDS方法融合了PTA方法的优势,显著度变低;3)对于图像边缘(1, 892),2种融合方法吸收了PCT方法优势,显著度降低。
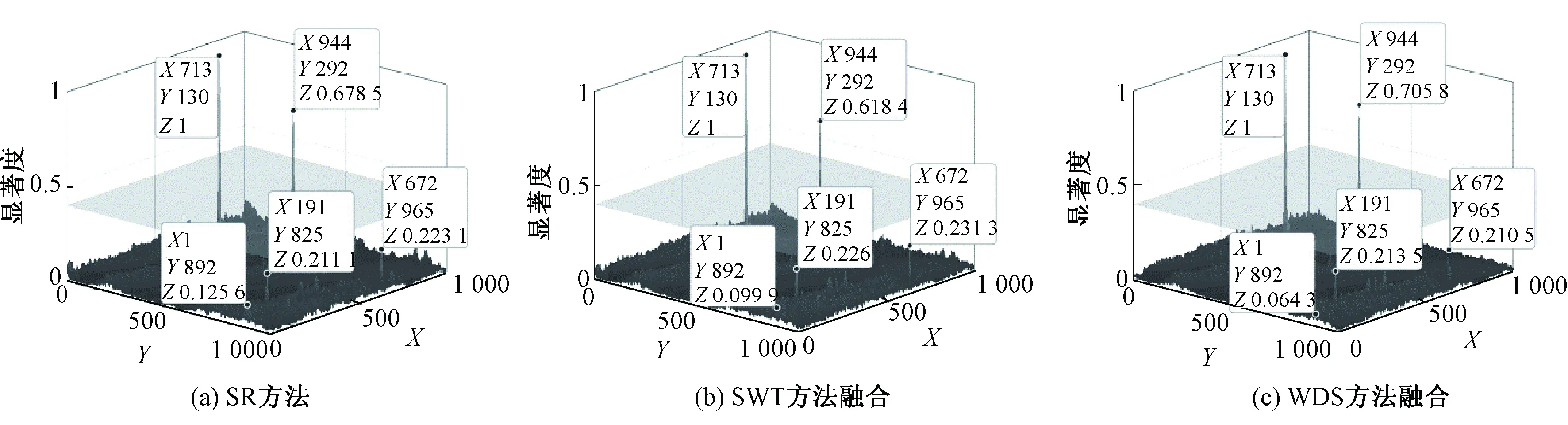
图8 密卷云场景不同融合方法显著图三维视图Fig.8 3D images of saliency map using different fusion methods on cirrus clouds image
有岛屿场景下3种方法显著图提取结果如图9所示,从图中可以看出:1)通过面积特征对岛礁过滤后,3种方法均检测到2个尾迹;2)SWT方法虽然在(615, 806)处的舰船尾迹得到了更高的显著度,但是在(352, 934)和(89, 500)2处背景点显著度也相应变高,提高了虚警风险,WDS方法在这几处和SR方法基本一致;3)在图像边缘(384, 999)处,2种融合方法的抑制效果更优,其中WDS方法在该处的显著度由SR方法的0.355 5降低至0.211 2,比SWT方法抑制效果更明显。

图9 有岛屿场景不同融合方法显著图三维视图Fig.9 3D images of saliency map using different fusion methods on island scene image
表3展示了对3个场景的各28帧图像序列进行舰船检测的结果,通过分析可以看出:1)在薄云场景中,尽管前文分析WDS方法和SWT方法优于SR方法,但是由于本身场景较为简单,检测效果较好,所以在该场景中,3种方法的检测结果基本相同;2)在密卷云场景中,2种融合方法使虚警数降低,且WDS方法使得(944, 292)处舰船尾迹的显著度提高,在尾迹从图像边缘向图像内运动时,可以提前一帧检测到该尾迹,WDS方法使漏检数得到降低;3)在有岛屿场景中,2种方法对图像边缘的显著度进行了有效抑制,图像边缘处虚警得到降低,但是SWT方法显著图岛屿边缘的显著度提升导致产生新的虚警,所以该方法最终总虚警数未发生变化,SWT的尾迹显著度有一定提升,漏检数优于其他2种方法;4)在处理时间指标上,融合方法需要在几种显著性检测方法结束后进行处理,故处理时间要高于单一显著性检测方法,SWT方法中使用小波变换且3幅显著图需要串行融合,故处理时间远高于WDS方法。综上,综合考虑检测效果和时效性,WDS方法虽然处理时间优于SWT方法,劣于SR方法,但是对于复杂场景(密卷云、有岛屿等)的检测效果要明显优于SR方法和SWT方法。
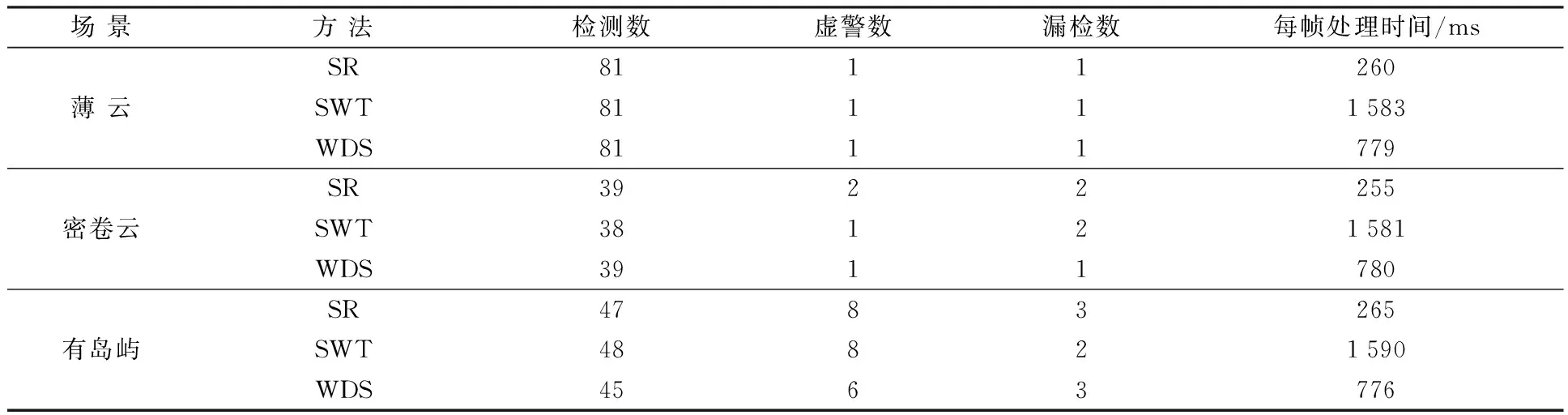
表3 GF-4图像序列不同融合方法舰船检测结果Table 3 Ship detection results using different fusion methods on GF-4 satellite sequential images
通过本节实验,可以得到以下结论:1)与PCT方法和PTA方法相比,尽管SR方法在大多场景下取得了较好的检测效果,但是在密卷云等场景下,可以利用WDS方法融合PCT方法和PTA方法的优点,使得检测效果进一步提升;2)尽管本文所提的基于显著图融合的GF-4卫星光学遥感图像多运动舰船目标检测方法处理时间高于单一显著性检测方法,但是平均每帧处理时间仍在0.8 s内,可以满足GF-4卫星光学遥感图像舰船目标检测的时效性需求;3)SWT方法在密卷云场景的次显著目标处,融合过程决策倾向于显著度较低的PTA方法,增加了目标漏检风险;4)WDS方法可以指定检测效果较好的SR方法显著图为基础显著图,使得最终结果在融合其他方法优点的基础上,不会因为不同方法某点显著度的较大偏差导致偏离较好的基础结果过多,从而具有更好的适应性。综上所述,WDS方法可以通过融合多种显著性检测方法的结果,提升GF-4卫星光学遥感图像多舰船检测效果。
4 结论
GF-4卫星高时间分辨率、高空间分辨率和高成像幅宽等优点,使其对运动舰船进行连续观测成为可能。面对运动舰船尾迹纹理和几何特征少、变化大,环境复杂等实际困难,本文提出一种基于WDS方法的GF-4卫星光学遥感图像多运动舰船检测方法,融合SR方法、PCT方法和PTA方法在不同场景下进行舰船检测的优点,能够利用GF-4卫星光学遥感图像对海上舰船的尾迹进行准确、快速地检测,这对打击海上偷渡、非法捕捞等犯罪活动具有重要意义。
